JUKI IS软件说明书_.pdf - 第52页
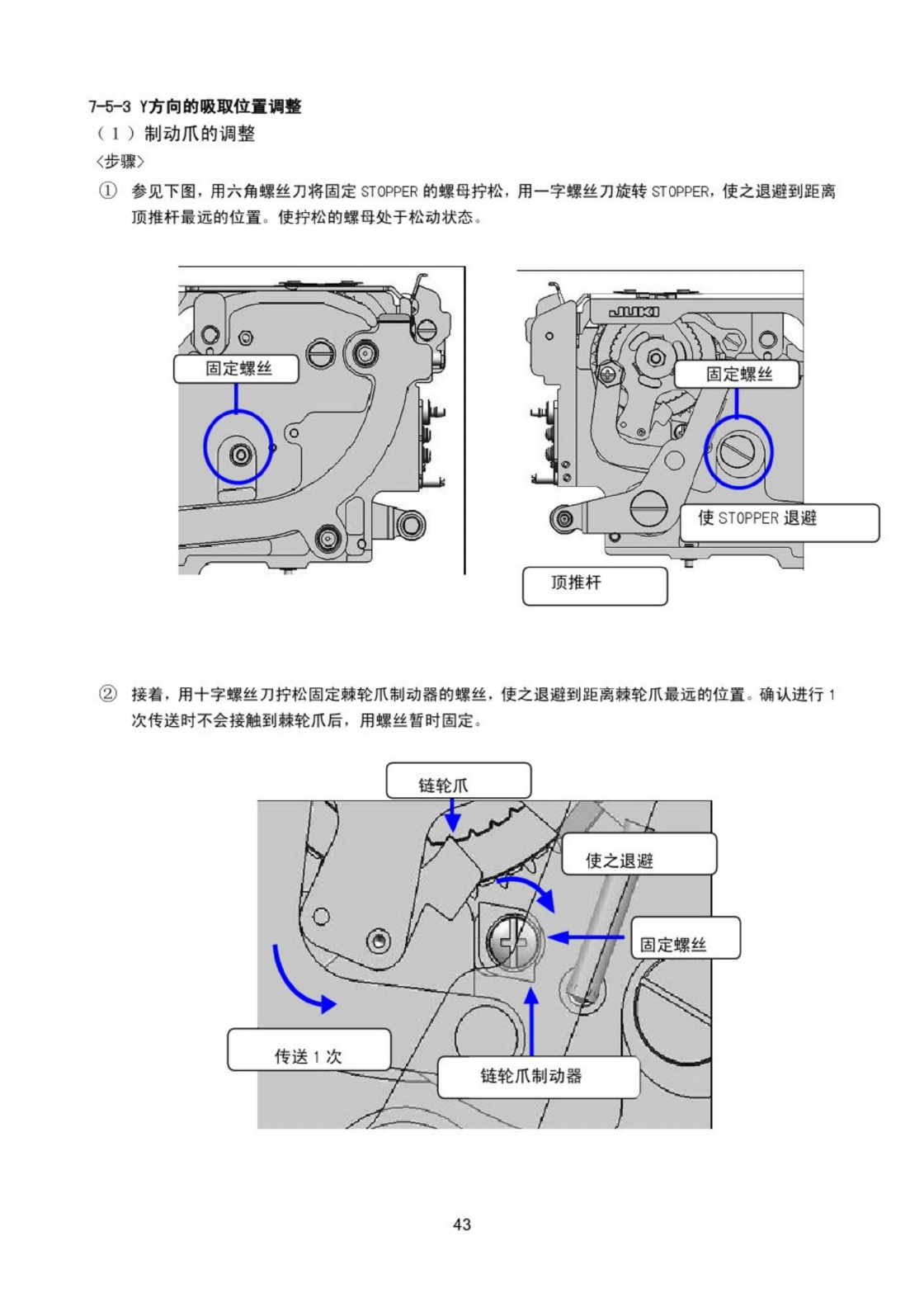
7 - 5 - 3 Y 方向的吸取位置调整 ( 1 ) 制动爪的调整 〈 步骤 〉 ① 参见下图 , 用六角螺丝刀将固定 STOPPER 的螺母拧松 , 用一字螵丝刀旋转 STOPPER , 使之退避到距离 顶推杆最远的位置 a 使拧松的螺母处于松动状态 。 nfnrn ^ n ◎ 固定螺丝 o 使 STOPPER 退避 顶推杆 ② 接着 , 用十字螺丝刀拧松固定棘轮爪制动器的螺丝 , 使之退避到距离棘轮爪鼉远的位置 = 确认进行 1 …
⑦
调整后
,
用
+
字螺丝刀将步骒
④
拧松的
X
轴基准销的
2
处固定螺丝拧紧
,
⑧
用六角扳手
(
对边
1.5
mm
)
,
将步嫌
⑤
拧松的
X
轴调整轴固定螺丝拧紧
。
®
用调整夹具一侧的传送杆传送约
20
次
.
确认圆孔的位
M
分布均在下述各项规格范围内
。
如果是
NG
时
,
请返回步驟
④
.
重新进行调整
。
规格
刻度范围
(
大约
)
吸取位置规格
型号
CF
03
HPR
(
0603
用供料器
)
左右
0
.
5
刻度
±
0
.
035
纸带
、
压纹带专用机
左右
1
刻度
土
0.05
CF
05
*
*
R
~
08
**
R
CN
05
HPR
.
CN
08
HER
,
CF
8
L
1
*
R
纸带
、
压纹带专用机
左右
2
刻度
±
0.1
CN
081
CR
,
CN
8
L
1
CR
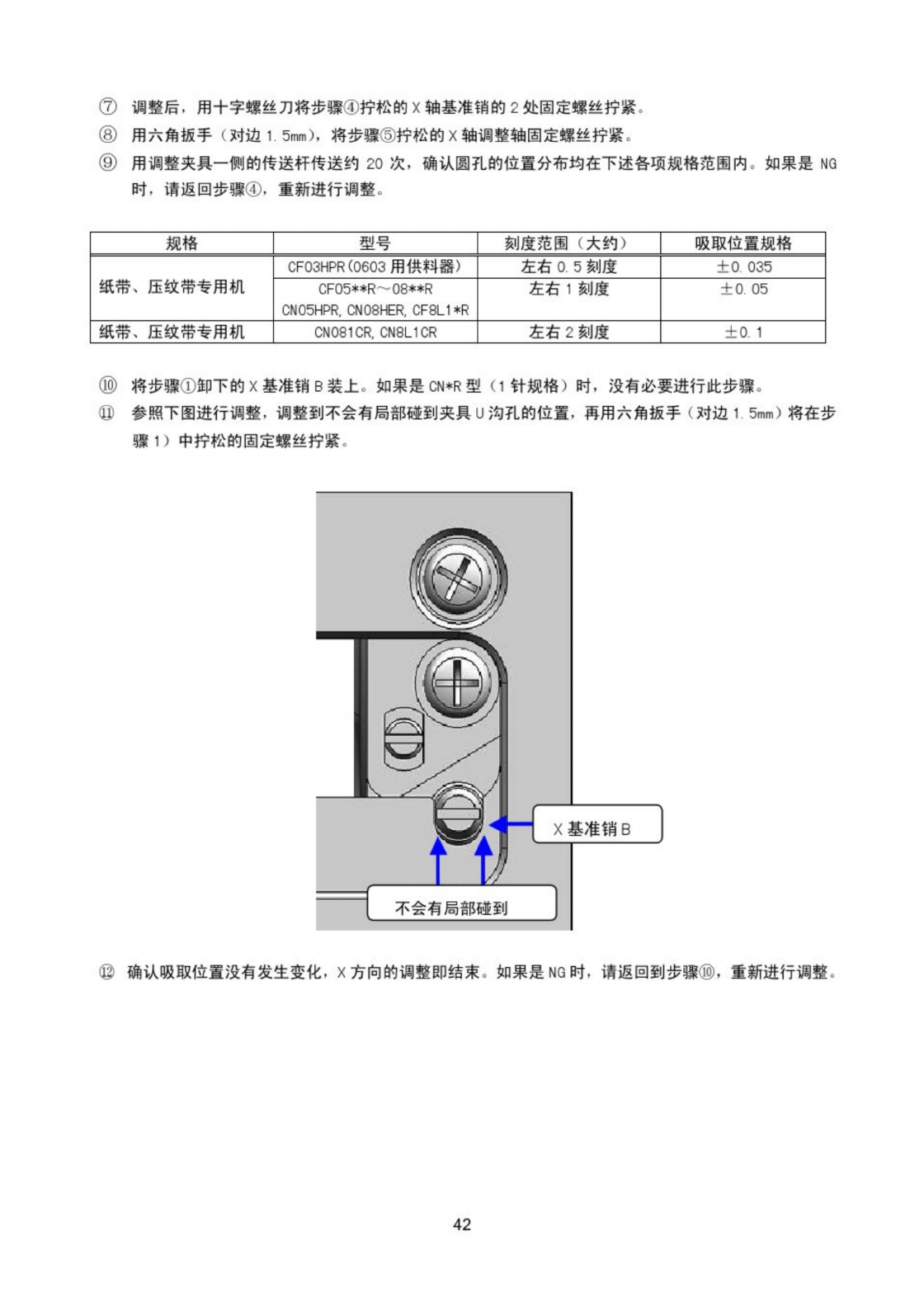
⑩
将步播
①
卸下的
X
基准销
B
装上
。
如果是
CN
*
R
型
(
1
针规格
)
时
,
没有必要进行此步骤
。
⑪
参照下图进行调整
.
调整到不会有局部碰到夹具
U
沟孔的位置
,
再用六角扳手
(
对边
1
5
mm
)
将在步
骤
1
)
中拧松的固定螺丝拧紧
。
⑫
确认吸取位
S
没有发生变化
,
X
方向的调整即结束
a
如果是
NG
时
,
请返回到步嫌
⑩
,
重新进行调整
a
42
7
-
5
-
3
Y
方向的吸取位置调整
(
1
)
制动爪的调整
〈
步骤
〉
①
参见下图
,
用六角螺丝刀将固定
STOPPER
的螺母拧松
,
用一字螵丝刀旋转
STOPPER
,
使之退避到距离
顶推杆最远的位置
a
使拧松的螺母处于松动状态
。
nfnrn
^
n
◎
固定螺丝
o
使
STOPPER
退避
顶推杆
②
接着
,
用十字螺丝刀拧松固定棘轮爪制动器的螺丝
,
使之退避到距离棘轮爪鼉远的位置
=
确认进行
1
次传送时不会接触到棘轮爪后
,
用螺丝暂时固定
=
链轮爪
43
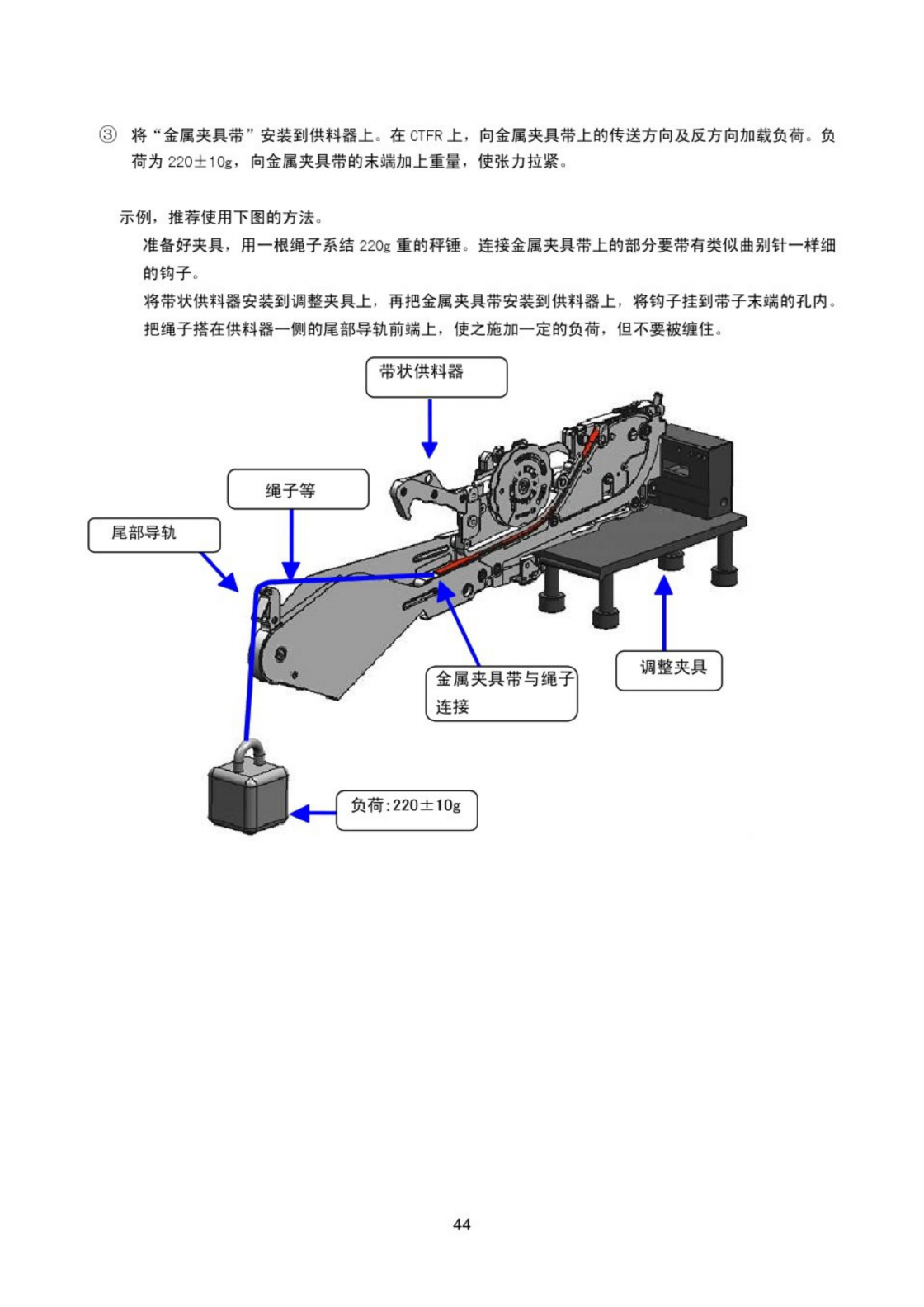
③
将
“
金属夹具带
”
安装到供料器上
。
在
CTFR
上
,
向金属夹具带上的传送方向及反方向加载负荷
。
负
荷为
220
±
10
g
,
向金属夹具带的末端加上重量
,
使张力拉紧
.
示例
.
推荐使用下图的方法
。
准备好夹具
.
用一根绳子系结
220
g
重的秤锤
.
连接金属夹具带上的部分要带有类似曲别针一样细
的钩子
。
将带状供料器安装到调整夹具上
.
再把金属夹具带安装到供料器上
,
将钩子挂到带子末端的孔内
。
把绳子搭在供料器一侧的尾部导轨前端上
,
使之施加一定的负荷
,
但不要被缠住
。
带状供料器
绳子等
尾部导轨
9
调整夹具
金属
i
具带与绳子
1
‘
连接
I
负荷
:
220
士
10
g
44