JUKI IS软件说明书_.pdf - 第57页
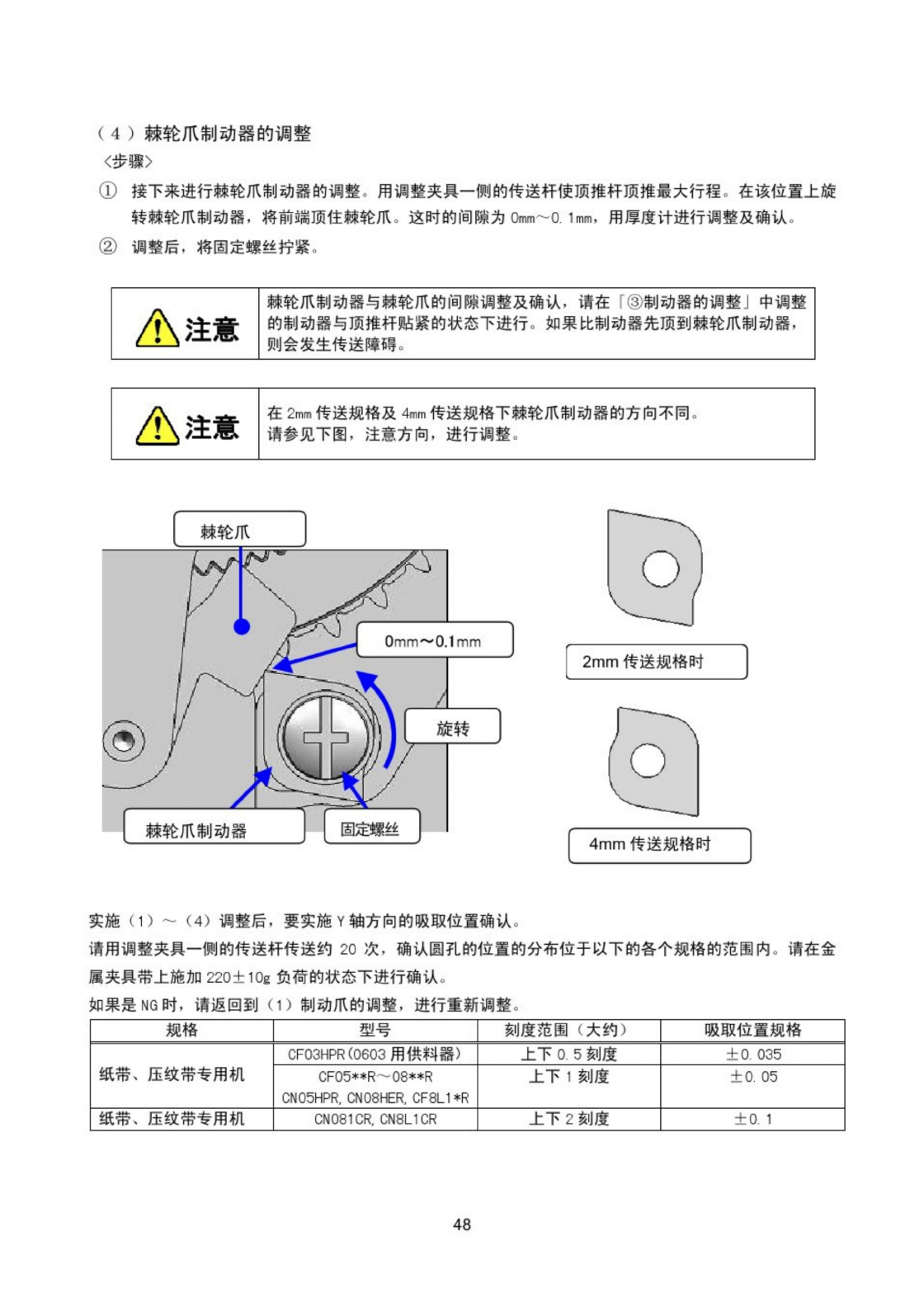
( 4 ) 棘轮爪制动器的调整 〈 步嫌 〉 ① 接下来进行棘轮爪制动器的调整 。 用调整夹具一侧的传送杆使顶推杆顶推最大行程 . 在该位置上旋 转棘轮爪制动器 , 将前端顶住棘轮爪 。 这时的间隙为 Onmr ^ O . 1 mm , 用厚度计进行调整及确认 。 © 调整后 , 将固定螺丝拧紧 . 棘轮爪制动器与棘轮爪的间隙调整及确认 . 请在 f ③ 制动器的调整 j 中调整 的制动器与顶推杆貼紧的状态下进行 。 如果比制动器先顶到…
(
3
)
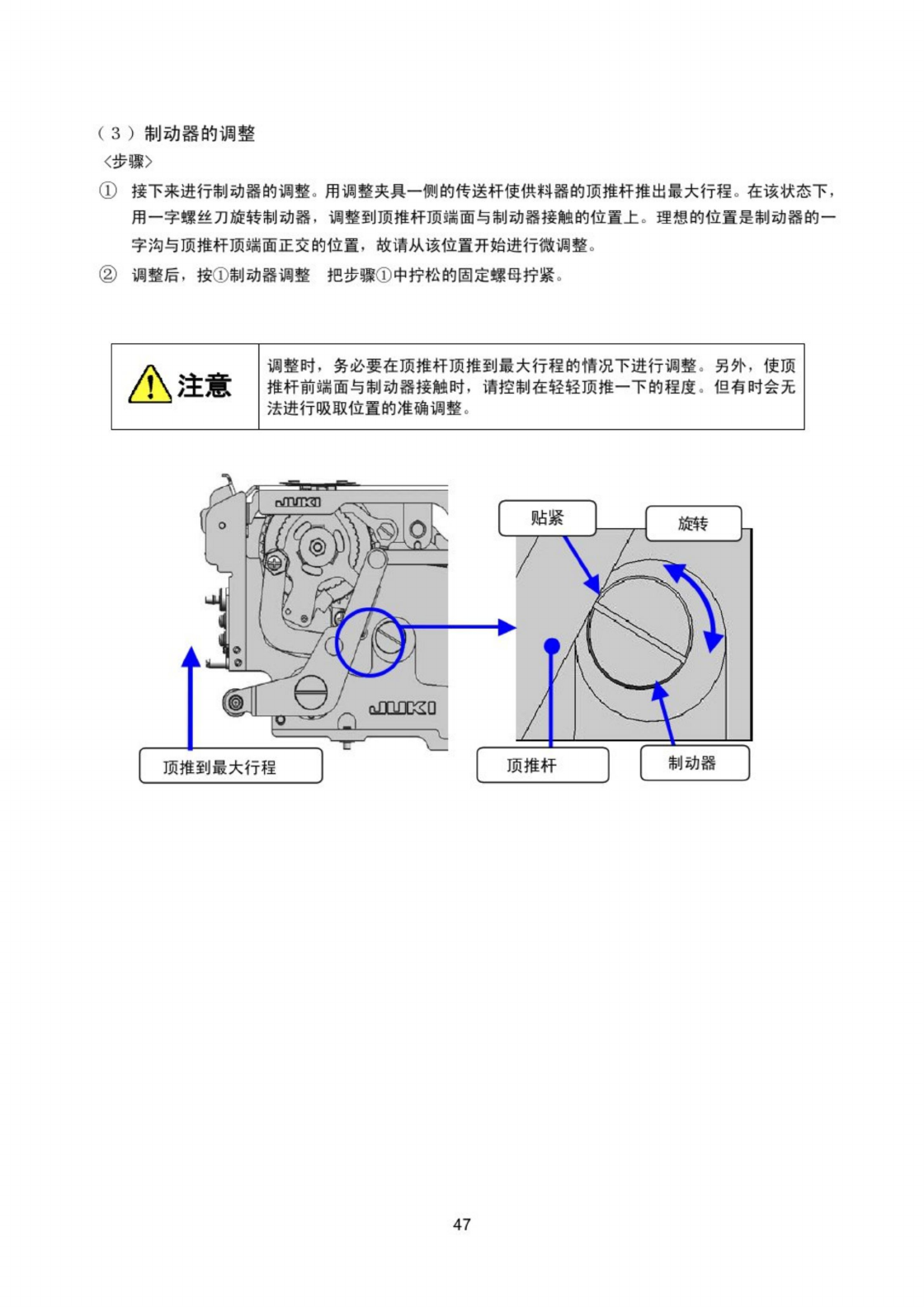
制 动 器 的 调 整
〈
步播
〉
®
接下来进行制动器的调整
。
用调整夹具一侧的传送杆使供料器的顶推杆推出最大行程
。
在该状态下
.
用一字螵丝刀旋转制动器
,
调整到顶推杆顶端面与制动器接触的位置上
t
理想的位置是制动器的一
字沟与顶推杆顶端面正交的位置
.
故请从该位置开始进行微调整
(
D
调整后
,
按
①
制动器调整把步骤
①
中拧松的固定螺母拧紧
。
调整时
,
务必要在顶推杆顶推到最大行程的悄况下进行调整
^
另外
,
使顶
推杆前端面与制动器接触时
,
请控制在轻轻顶推一下的程度
,
但有时会无
法进行吸取位置的准确调整
。
△
注意
贴紧
m
专
V
\
制动器
顶推杆
顶推到最大行程
47
(
4
)
棘轮爪制动器的调整
〈
步嫌
〉
①
接下来进行棘轮爪制动器的调整
。
用调整夹具一侧的传送杆使顶推杆顶推最大行程
.
在该位置上旋
转棘轮爪制动器
,
将前端顶住棘轮爪
。
这时的间隙为
Onmr
^
O
.
1
mm
,
用厚度计进行调整及确认
。
©
调整后
,
将固定螺丝拧紧
.
棘轮爪制动器与棘轮爪的间隙调整及确认
.
请在
f
③
制动器的调整
j
中调整
的制动器与顶推杆貼紧的状态下进行
。
如果比制动器先顶到棘轮爪制动器
.
则会发生传送陣碍
i
△
注意
在
2
mm
传送规格及
4
mm
传送规格下棘轮爪制动器的方向不同
。
请参见下图
,
注意方向
,
进行调整
^
么注意
棘轮爪
o
Omm
0.1
mm
2
mm
传送规格时
旋转
固定螺丝
棘轮爪制动器
4
mm
传送规格时
实施
(
1
)
(
4
)
调整后
.
要实施
Y
轴方向的吸取位置确认
。
请用调整夹具一侧的传送杆传送约
20
次
,
确认圆孔的位置的分布位于以下的各个规格的范围内
。
请在金
属夹具带上施加
220
±
10
g
负荷的状态下进行确认
。
如果是
NG
时
.
请返回到
(
1
)
制动爪的调整
.
进行重新调整
。
规格
型号
刻度范围
(
大约
)
吸取位置规格
CF
03
HPR
(
0603
用供料器
)
上下
0.5
刻度
±
0
.
035
纸带
、
压纹带专用机
上下
1
刻度
土
0
.
05
CF
05
*
*
R
~
08
*
*
R
CN
05
HPR
,
CN
08
HER
,
CF
8
L
1
*
R
纸带
、
压纹带专用机
上下
2
刻度
±
0.1
CN
081
CR
,
CN
8
L
1
CR
48
7
-
6
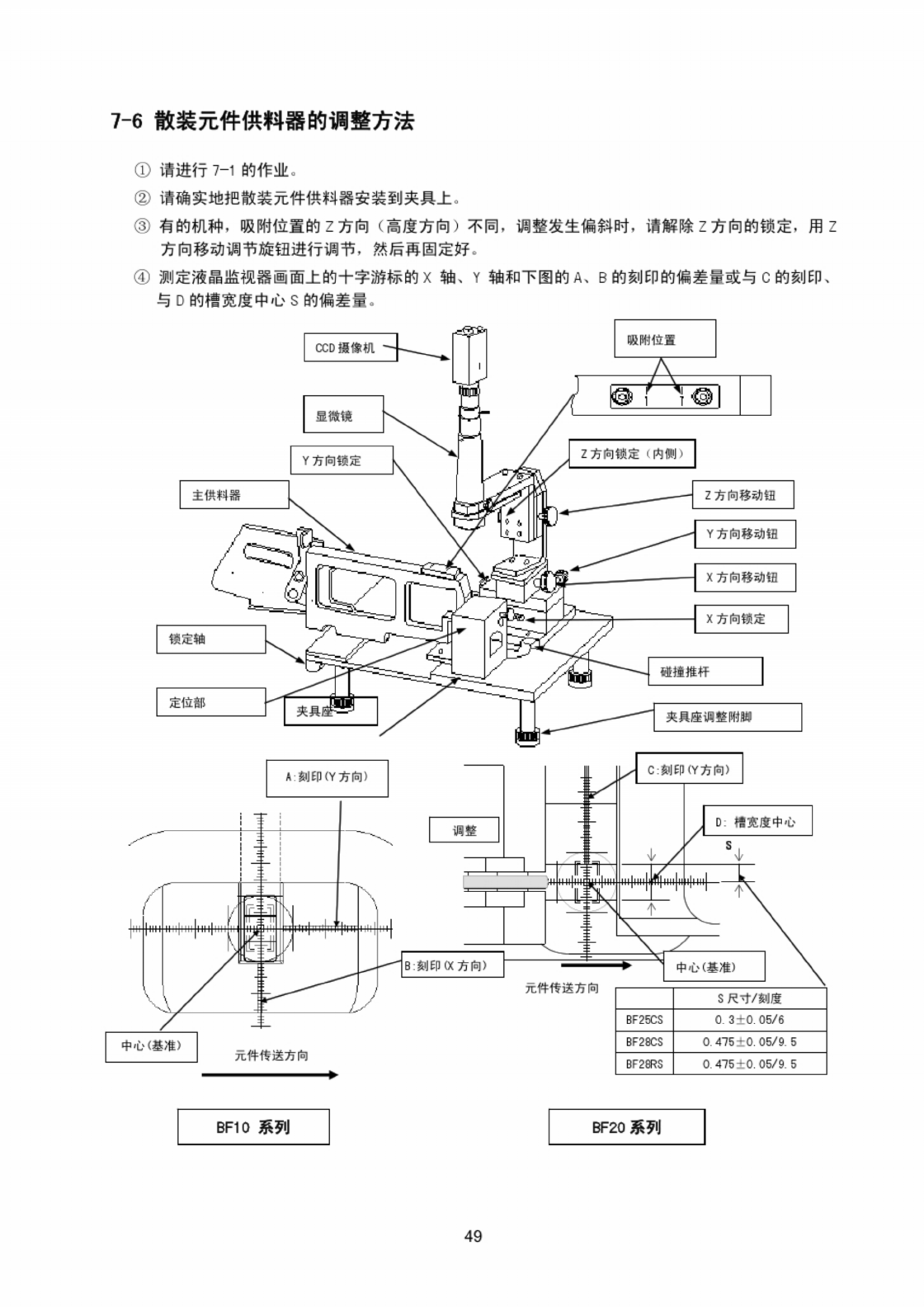
散装元件供料器的调整方法
①
请进行
7
-
1
的作业
。
②
请确实地把散装元件供料器安装到夹具上
。
③
有的机种
,
吸附位置的
Z
方向
(
高度方向
)
不同
,
调整发生偏斜时
,
请解除
Z
方向的锁定
,
用
Z
方向移动调节旋钮进行调节
,
然后再固定好
。
④
测定液晶监视器画面上的十字游标的
X
轴
、
Y
轴和下图的
A
、
B
的刻印的偏差星或与
C
的刻印
、
与
D
的槽宽度中心
S
的偏差屋
。
吸附位置
CCD
摄像机
匬
显微镜
Z
方向锁定
(
内侧
)
Y
方向锁定
Z
方向移动钮
Y
方向移动钮
X
方向移动钮
X
方向锒定
碰揸推杆
夹具座调整附脚
〆
C
:
刻印
(
Y
方向
)
A
:
刻印
<
Y
方向
>
1
X
1
D
:
榷宽度中心
调整
in
|
mi
I
fii
mi
II
ill
in
小
SI
■
liiil
M
|
HM
|
HM
|
I
B
刻印
(
X
方向
〉
中心
(
基准
)
元件传送方向
S
尺寸
/
刻度
0
.
3
士
0.05
/
6
0.475
士
0.05
/
9.5
中心
《
基准
〉
元件传送方向
0.475
土
0
_
05
/
9.5
BF
10
系列
BF
20
系列
49