NXT 机械手册 QD029-29.pdf - 第417页
9. 测定和调整 QD029-09 400 NXT 机械手册 2. 找出要调节的传感器的放大器,打开传 感器放大器的盖罩。 3. 请确认 ON 状态开关设定为 "LO"。 4. 按下号码盘一次后,数字显示屏的显示 变成 「AA」 ,模式光标指示 器的 RUN 闪烁。 备注 ) 如果发生错误,即使在数字显示屏上的显示不变化、 或者显示出其他的项目,而模式指示器被 正确地变更。 5. 旋转号码盘使数字显示屏显示为 「PH…
QD029-09 9. 测定和调整
NXT 机械手册 399
9.3 搬运轨道用的左右传感器的灵敏度调整
在用手动进行搬运轨道的宽度变更时,有必要调节模组左右安装的传感器的灵敏度,传感器
的灵敏度调节请在关闭模组电源的状态下进行。在更换传感器的时候,也有必要调整传感器
的灵敏度。
实际上尽管在没有电路板的情况下也会误认为有电路板而产生误动作,或者是因为某种原
因而使传感器遮住光线的时候也有必要进行传感器的调节。
9.3.1 调整方法
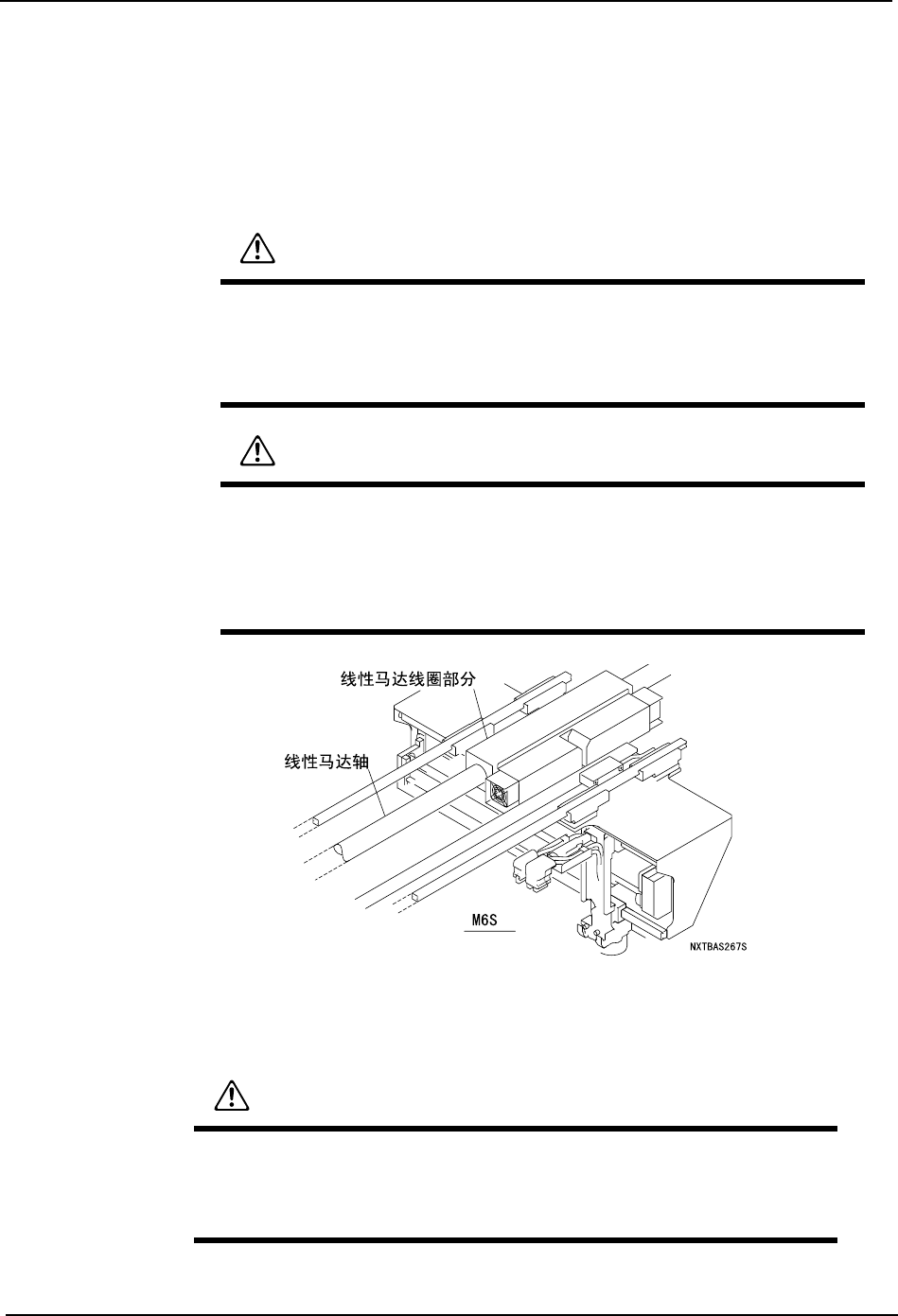
1. 将要调整的模组向前方拉出。
注意
在 M6S 模组的线性马达附近使用工具的时候,请注意因磁力而产生的吸力
作用。有时会因磁力产生破损、故障。
在 M6S 模组的线性马达附近,请不要将磁卡、手表、精密仪器等靠近。
警告
M6S 模组刚运转后,请不要直接触摸 Y 轴的线性马达部分。有可能因高温
被灼伤。
使用心藏起搏器的用户,请离开 M6S 模组的 Y 轴进行操作。有可能造成心
藏起搏器的误动。
警告
·请不要将手指伸入机器侧面的盖罩和基座之间的空隙中去。拉出模组时
有可能夹住手指。
·请不要坐在基座上,以防摔下遭成伤害。
9. 测定和调整 QD029-09
400 NXT 机械手册
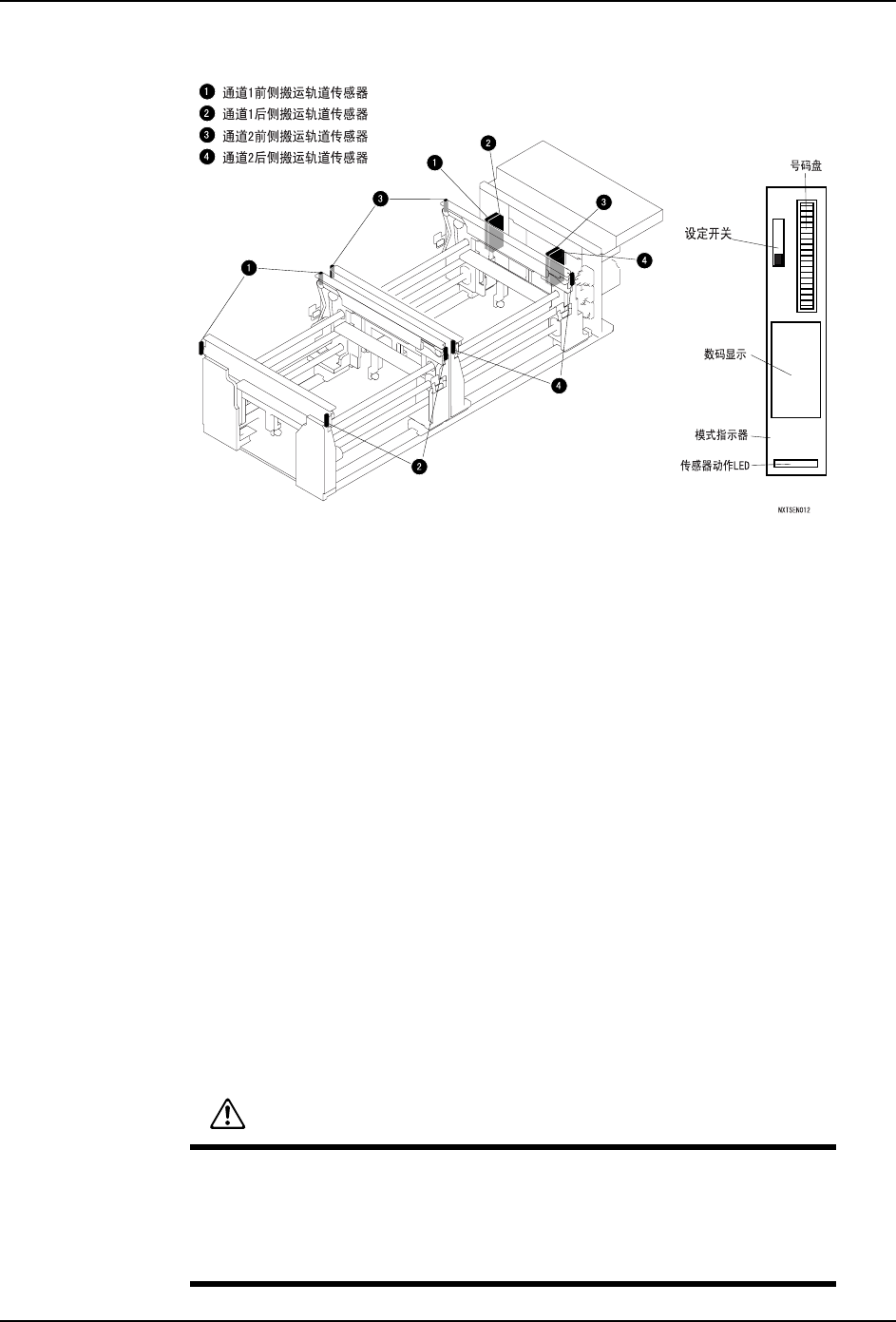
2. 找出要调节的传感器的放大器,打开传感器放大器的盖罩。
3. 请确认 ON 状态开关设定为 "LO"。
4. 按下号码盘一次后,数字显示屏的显示变成 「AA」,模式光标指示器的 RUN 闪烁。
备注 ) 如果发生错误,即使在数字显示屏上的显示不变化、或者显示出其他的项目,而模式指示器被
正确地变更。
5. 旋转号码盘使数字显示屏显示为 「PH」。此时,模式光标指示器的 SET 闪烁。
6. 按下一次号码盘后,在 SET 不闪烁的同时 「PH」的显示闪烁。
7. 按下一次号码盘后,此时的传感放大器的数值在数字显示屏上以闪烁显示出来。〔例∶
90)
8. 旋转号码盘直到显示屏的显示变成 90。
9. 显示屏的显示成为 90 后,按下一次号码盘并输入此值后,显示出 「PH」。
10.再次按下号码盘时,模式光标指示器的 SET 变成闪烁显示。
11.显示出 「AA」,模式显示器的 RUN 处于闪烁状态。
12.再次按下号码盘时,数字显示屏的显示变成现在的实测值,模式指示器的 RUN 闪烁停止。
13.遮住调整后的传感器光轴。请确认在光轴被遮光的情况下,传感器的 LED 是否处于关灯
的状态。如光轴即使被遮光,而 LED 没有正确反应时,请重复上面的步骤。
14.关闭传感器放大器的盖罩,将模组插入原来的位置。
警告
·将模组插入基座时,请确认模组后侧没有人在。模组与基座间的空隙有
可能夹住身体、手指而造成伤害。
·在抽出 / 插入模组时,不要将手指伸入与相邻模组之间的空隙中。有可
能手指被挟在模组间并被切断。
RUN
SET
TMR
ADJ
DO
LO
20
QD029-09 9. 测定和调整
NXT 机械手册 401
9.4 模组用的真空传感器
9.4.1 调整方法
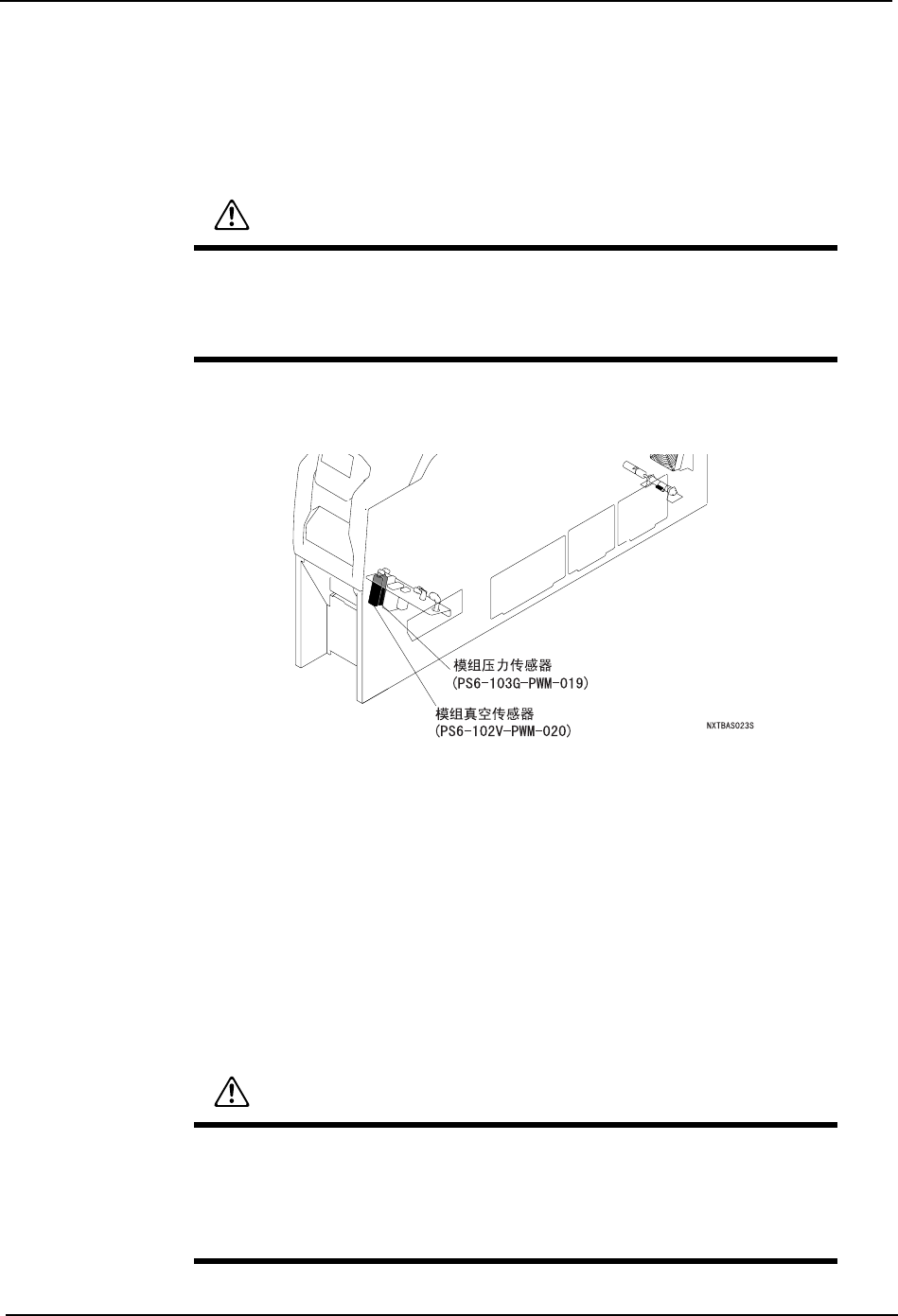
1. 请向前方抽出要调整的模组。要调整的模组在基座的左端,而模组的左侧带有盖罩时,
要将侧面的盖罩取下以腾出传感器附近的空间。
2. 模组真空传感器配置在前面左下方。这个位置上有编号的传感器有 2 个,从模组的前面
看过去位于前侧的一个为真空传感器。
3. 使用精密的一字型螺丝刀,将 MODE 开关变更到 “S1”。
4. 用螺丝刀调节 SET1 开关,使显示值为 -59。
备注 ) 变更 MODE 开关的设定只能变更显示,调整 SET1 或 SET2 开关后即使开关的值不被显示出来,调
整值也会被变更。
5. 用螺丝刀将 MODE 开关变更到 “S2”。
6. 用螺丝刀调节 SET2 开关,使显示值为 0.0。
7. 为了显示出现在的真空压,将 MODE 开关调回到 “ME”。
备注 ) 在未显示开关值的状态下变更开关时,在显示开关值后,务必将开关值调整至正确值。
8. 在取下侧面盖罩的场合,先把盖罩盖上,再把模组插入原来的位置。
警告
·请不要把手伸入机器侧面的盖罩和基座之间的空隙中去。抽出模组时有
可能夹住手指造成伤害。
·请不要坐在基座上,以防摔下遭成伤害。
警告
·将模组插入基座时,请确认模组后侧没有人在。模组与基座间的空隙有
可能夹住身体、手指而造成伤害。
·在抽出 / 插入模组时,不要将手指伸入与相邻模组之间的空隙中。有可
能手指被挟在模组间并被切断。