RS-1維修調整要領書.pdf - 第19页
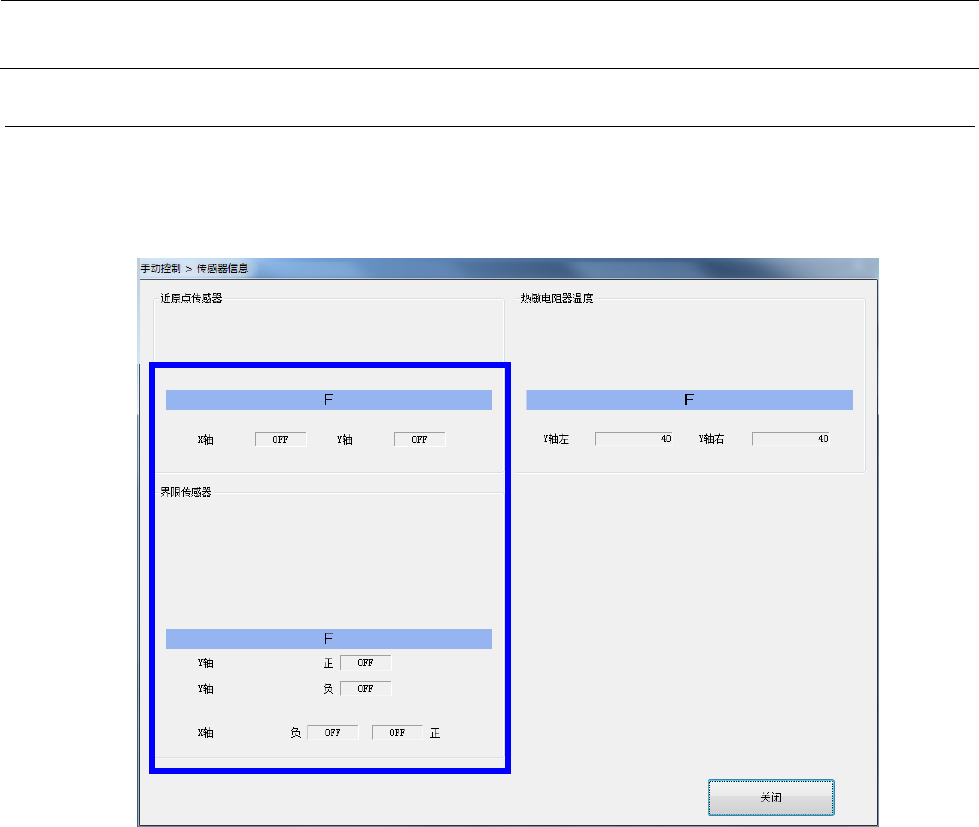
维修调整要领书 1- 12 1-2- 3 传感器动作确认 1 ) 各轴以手动方式移动, 通过 “手动控制” → “传感器信息” 确认接近传感器 (显示是原点传感器) 、 各限位传感器会 ON 、 OF F 。
维修调整要领书
1-11
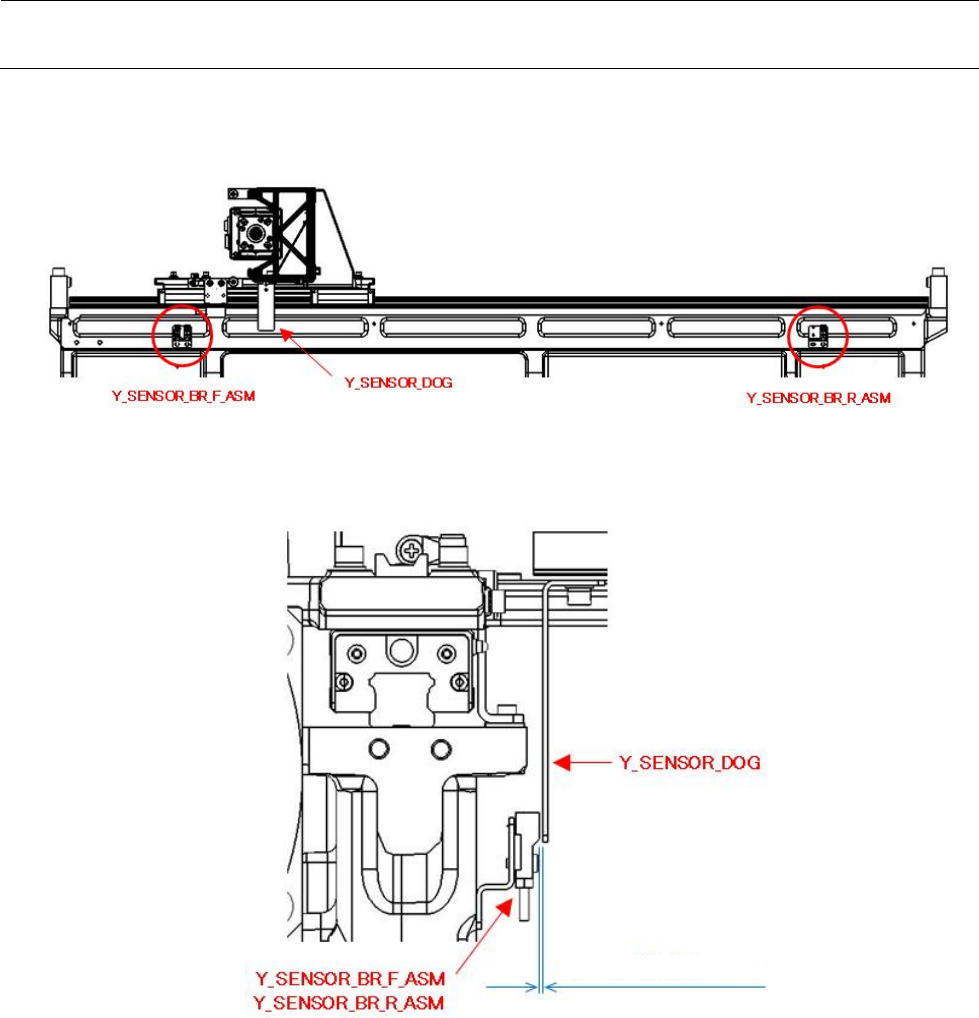
2) 后方固定时,要使 Y 传感器止动卡具与传感器表面的空隙为 1.8~2.5mm(目标是 2.0mm)。
(图 1-2-2-2)
c
图 1-2-2-2
0.8~1.5mm(目标是1.0mm)
维修调整要领书
1-12
1-2-3 传感器动作确认
1) 各轴以手动方式移动,通过“手动控制”→“传感器信息”确认接近传感器(显示是原点传感器)、
各限位传感器会 ON、OFF。
维修调整要领书
1-13
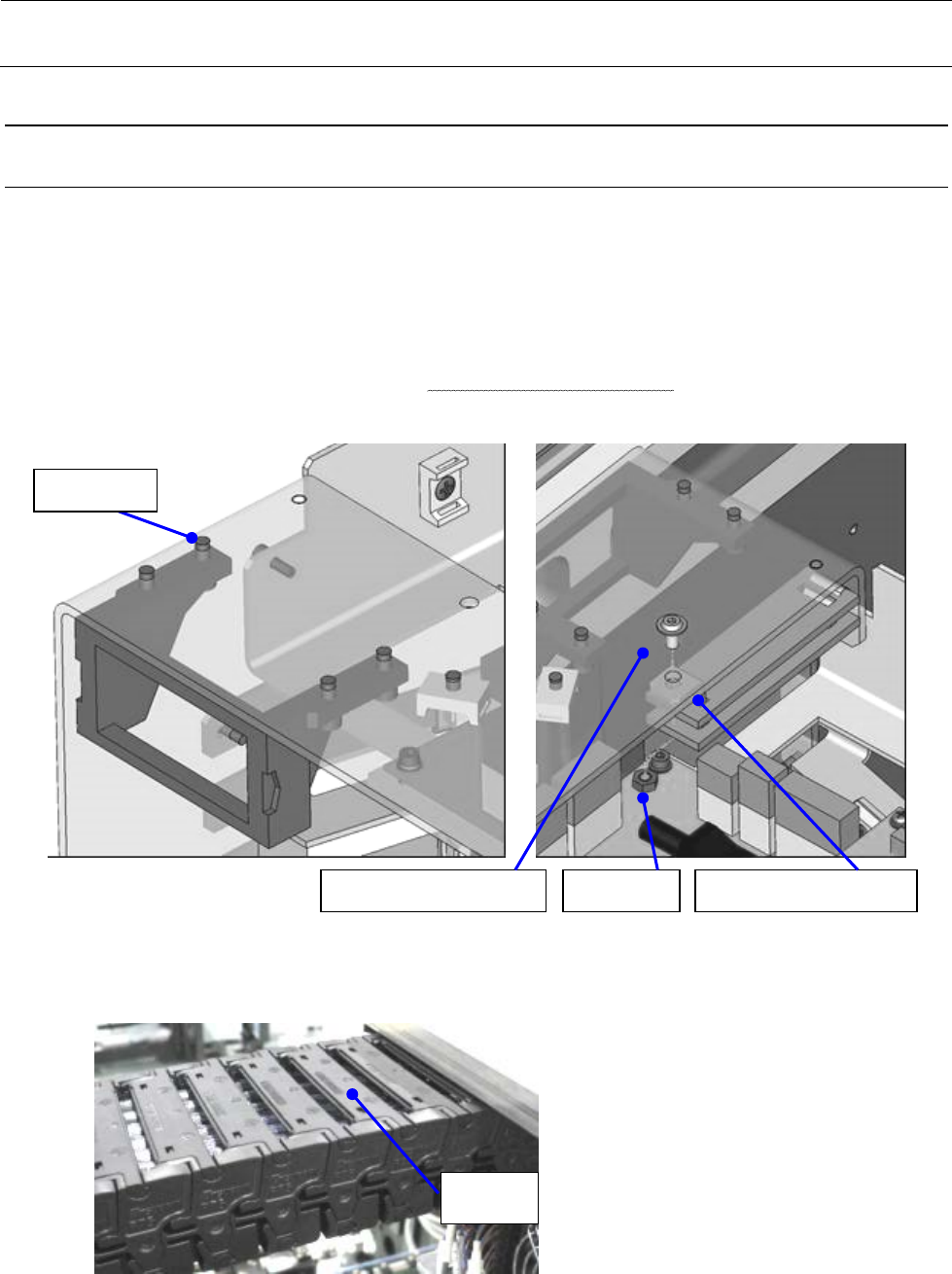
1-3 电缆拖链的更换
1-3-1 X 轴电缆拖链的更换
X_CABLEVEYOR(货号:40110451)
1) 拆下内六角螺栓 M4×10,拆下 X_CABLE_BEAR。
2) 拆下 B_COVER_SCREW 和 M4 螺母,拆下 CABLE_CLAMP_X2 和 FC_RUBBER。
3) 拆下 X 轴电缆拖链的臂板,取出线束进行更换。
4) 按相反的步骤进行装配。这时,请注意电缆拖链内的线束不要缠绕。
并且,请用手推入 X 电缆拖链内部的线束,确认不绷紧。
图 1-3-1-1 X 轴电缆拖链
臂板
M4×10
B_COVER_SCREW
M4
螺母
CABLE_CLAMP_X2