CP7 training(6.0) (1).pdf - 第39页
FK-9F98-27 CP-7 Series T raini ng T ext for Service Engineers Edition 6.0 Chapter 3. X, Y , Z and D-axes Adjustm ent [25/36] 3. Set the 4 PCU Unit Clamp and Unclamp flow co ntrols, 5 x from fully closed then lock. (A) PC…
FK-9F98-27 CP-7 Series Training Text for Service Engineers
Edition 6.0 Chapter 3. X, Y, Z and D-axes Adjustment [24/36]
8. The following table lists the D axis Calibration Data and physical data reference values:
CP-742/743E
D Axis Calibration Data Item (D1) Reference Value
(0.002mm/pulse)
+ Mechanical Stopper 5000 +/- 50
− OT Sensor ON
1500 +/- 50
Max Limit Position D1 1000 +/- 50
D1 Original Position 0 +/- 1000
Pick up position T1
(
−1150700)
Minimum Limit Position D1 – 1153500 +/- 1000
+ OT Sensor ON
− 1154000 +/- 1000
− Mechanical Stopper
− 1157500 +/-1000
CP-742/743E
D Axis Calibration Data Item (D2) Reference Value
(0.002mm/pulse)
− Mechanical Stopper − 5000 +/- 50
− OT Sensor ON − 1500 +/- 50
Min Limit Position D2 – 1000 +/- 50
D2 Original Position 0 +/- 1000
Pick up position T2 (591300)
Max Limit Position D2 1153500 +/- 1000
+ OT Sensor ON 1154000 +/- 1000
+ Mechanical Stopper 1157500 +/- 1000
3.12.3 D-axis Pallet and Interference Prevention Sensor Adjustment
Note: Whenever moving the D table up and down, the D axis servo count must be at or very
close to zero. It is very important that the D table is positioned correctly in relation to
the lifter. If not, a crash may occur. Also, check that the lifters are at their lower limit
whenever moving the D tables along the D-Axis.
(Part 1) - Speed Controller Setting (all CP7 Series)
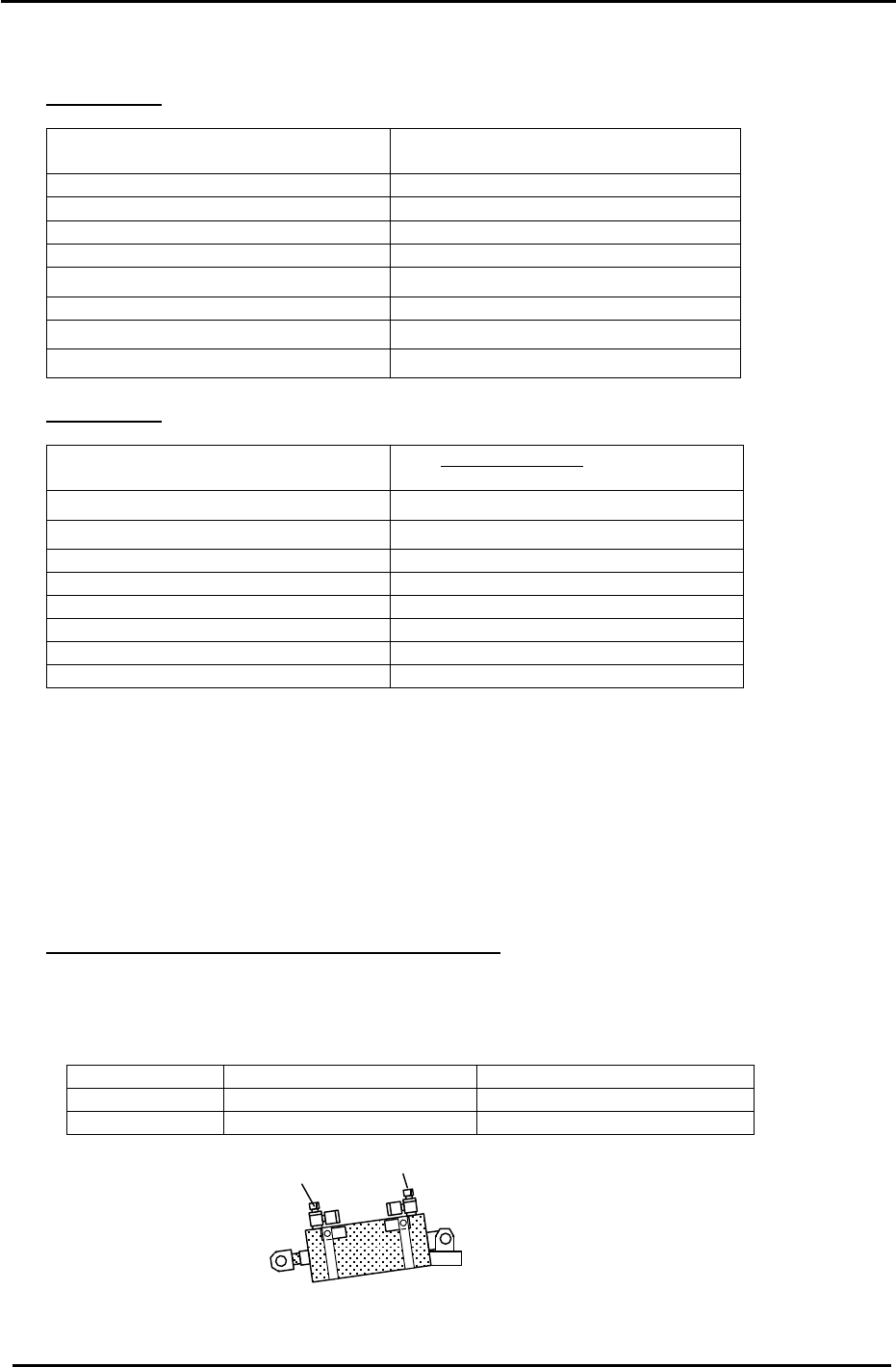
1. Move the D tables toward the center of the D axis; well away from the D original position.
2. Temporarily set the lifter UP and lifter Down flow controls:
CP-742/743(M)E CP-732/733E
UP 6 x from fully closed 4.5 x from fully closed
DOWN 3.5 x from fully closed 5 x from fully closed
UP
Down
Figure 30
Fuji Machine Mfg. Co., Ltd. (Okazaki)
SMT Equipment Quality Assurance Dept.
CS Section
3-24
FK-9F98-27 CP-7 Series Training Text for Service Engineers
Edition 6.0 Chapter 3. X, Y, Z and D-axes Adjustment [25/36]
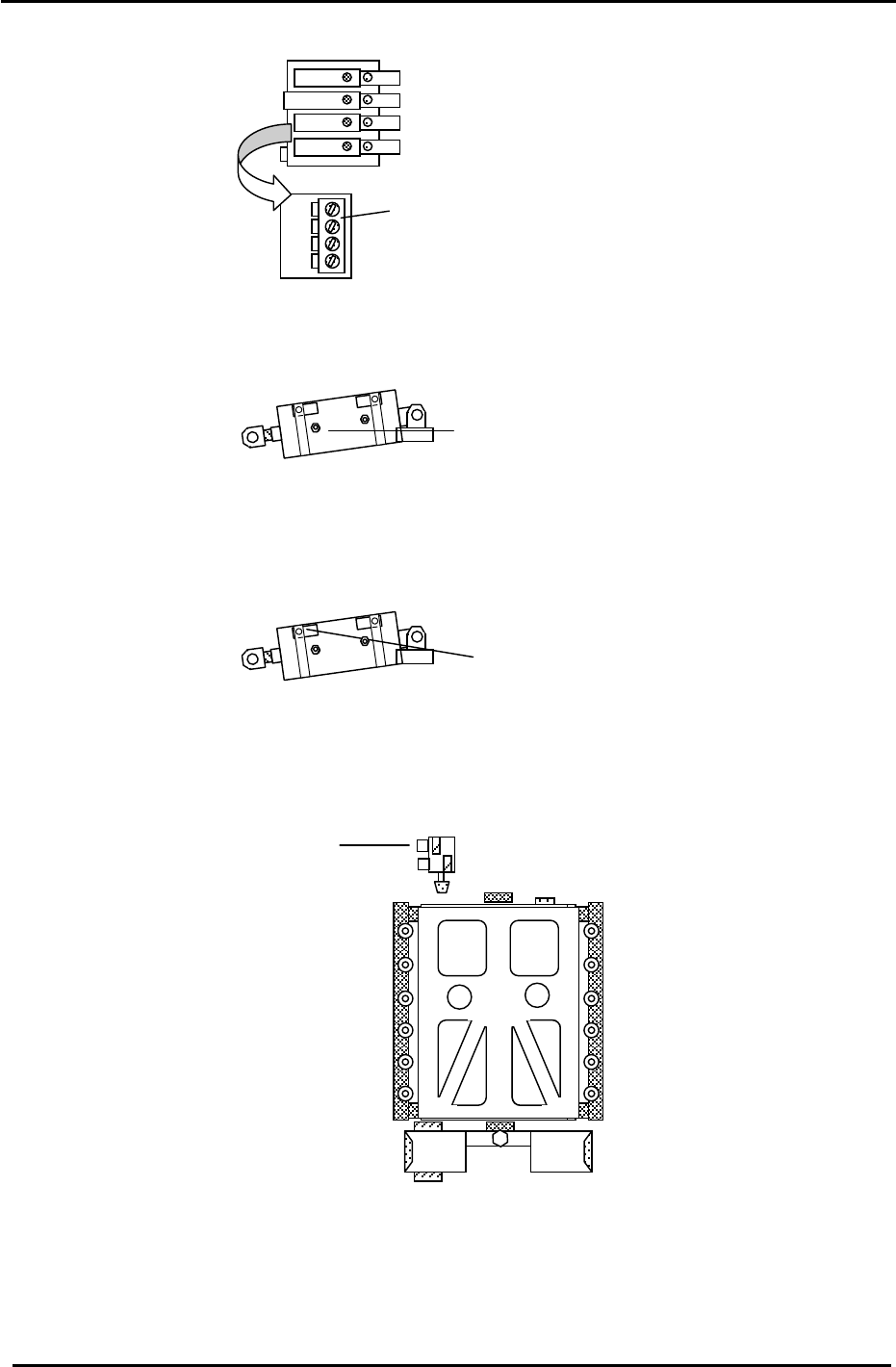
3. Set the 4 PCU Unit Clamp and Unclamp flow controls, 5 x from fully closed then lock.
(A) PCU flow controls
Pallet Up/Down control
PCU Clamper L
PCU Clam
p
er R
Figure 31
Table Stopper Cylinder control
4. Set the D cam cylinder cushioning adjustment screws, 2 x from fully closed, then lock.
Cylinder cushion
adjustment screws.
Figure 32
5. Set the D cam cylinder Upper and Lower Limit Check sensors 0.5mm toward the ON position.
Cylinder check sensors
Figure 33
6. Set the D table notch stopper flow controls 3 x from fully closed then lock.
Notch stopper flow controls
Figure 34
Fuji Machine Mfg. Co., Ltd. (Okazaki)
SMT Equipment Quality Assurance Dept.
CS Section
3-25
FK-9F98-27 CP-7 Series Training Text for Service Engineers
Edition 6.0 Chapter 3. X, Y, Z and D-axes Adjustment [26/36]
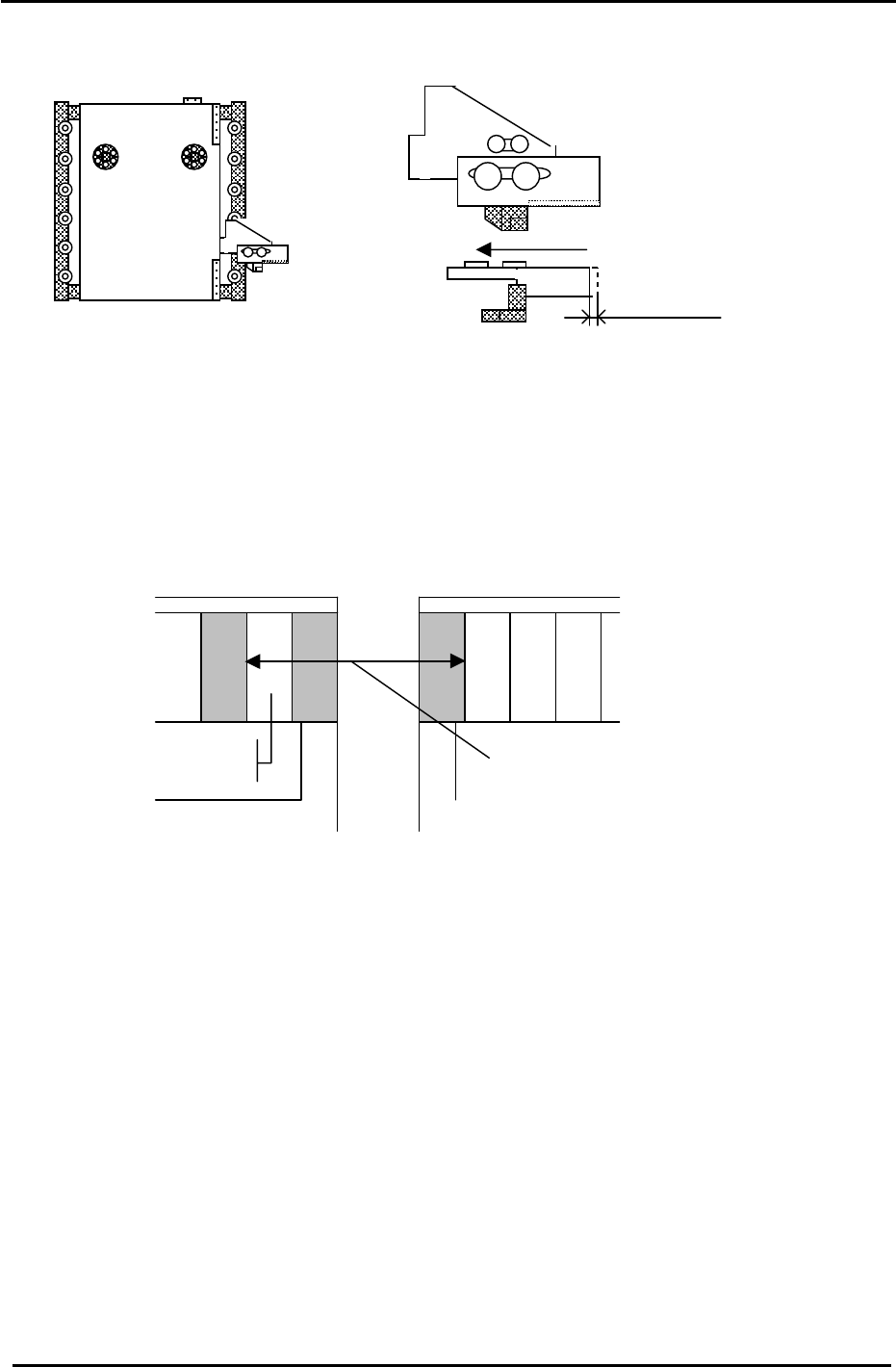
(Part 2) – Interference Prevention Sensor Adjustment (CP-742/743(M)E)
D1 Pallet
1.5mm
Figure 35
1. Check the motion of the interference prevention sensor bracket. Apply grease if necessary
2. Adjust the bracket so that the sensor LED turns ON when pushing the bracket to the left 1.5mm.
3. Check that the pitch between the last feeder slot (D1) and the first feeder slot (D2) is (72mm, CP-
742/743 Series) (59mm, CP-732/733 Series) when the sensor activates. (See the diagram below).
Make sure the bracket does not collide with the mechanical stopper. Use the I/O to check the exact
position where the interference prevention sensor activates: D1(SX041), D2 (SX049)
CP-732/733E Slot (30)
CP-742/743ME “ (40)
CP-742/743E “ (70)
Pallet 2
Slot
(1)
Feeder Pitch
72mm (742/743ME) (742/743E)
59mm (732/733E)
Pallet 1
Figure 36
4. Carry out the following procedure to set the software travel limits for D1 and D2. (CP-742/743(M)E)
4.1 Move D2 to the escape position. (0 pulses)
4.2 Push D1 towards D2 until the interference sensor just turns ON (D1: SX041) and record the
pulse count for D1.
4.3 Move D1, 500 pulses away from the sensor ON position and set the Calibration Data as
follows:
Press: [Maintenance] → [Calibration] → [Travel Limits] → [Minimum Limit D1]
4.4 Move D1 to the escape position (0 pulses)
4.5 Push D2 towards D1 until the interference sensor just turns ON (D2: SX049) and record the
pulse count for D2.
4.6 Move D2, 500 pulses away from the sensor ON position and set the travel Calibration Data
as follows:
Press: [Maintenance] → [Calibration] → [Travel Limits] → [Maximum Limit D2]
Fuji Machine Mfg. Co., Ltd. (Okazaki)
SMT Equipment Quality Assurance Dept.
CS Section
3-26