DECAN_S1_Administrator∏s_Guide(Chi_Ver1.4)_Web - 第116页
6-6 Next Generation, Multi-Functional Plac er DECAN S1 Administrator’s Guide <Light> 按钮 设定识别部品用 Fiduci al 照相机的照明度。 按下此按钮时, 显示以下画面。 组合框 用于回转 XY , Z 轴驱动电动机选 择移动到指定坐标位置的对象或用 于选择想 要获取当前坐标的对象。 可选择的对象如下 。 基准相机 1/2:…
6-5
Board
定义
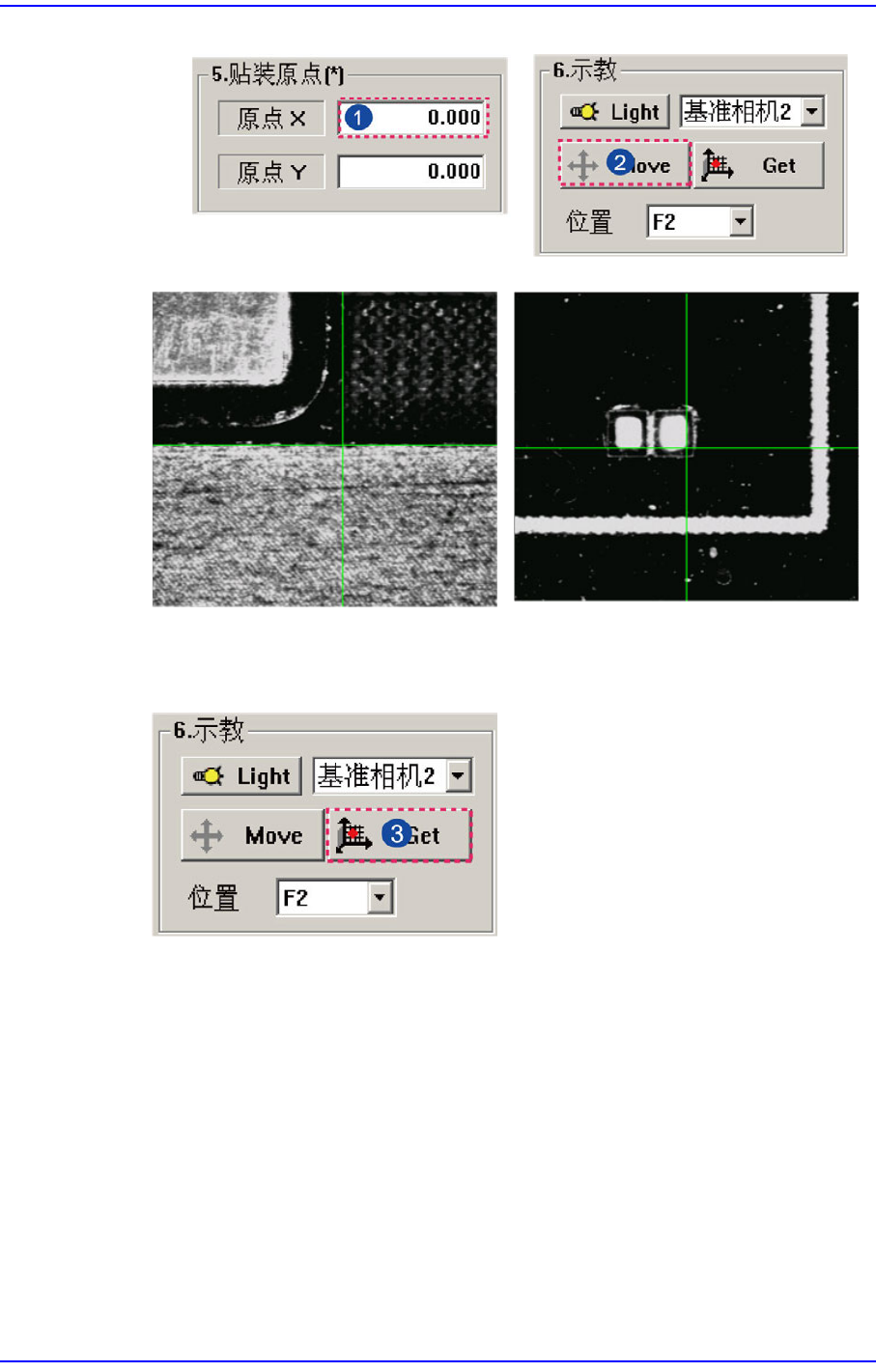
<原点X> 编辑框
设定PCB安装原点的X坐标。
<原点Y> 编辑框
设定PCB安装原点的Y 坐标。在<原点X>或<原点 Y>单击光标,再单击<8.
示教>领域的” 移动”或” 得到”按钮时, 可以利用在组合框中选择的组合框
进行贴装原点的示教。
<6. 示教> 领域
用于回转XY, Z轴驱动电动机在组合框中选择的对象移动到指定的坐标位置或
用于获取当前坐标位置。
[Case 1 - 使用Board Stop]
Array 板时很难适用
[Case 2 - 使用PCB Pattern]
Array 板时容易适用

6-6
Next Generation, Multi-Functional Placer DECAN S1 Administrator’s Guide
<Light> 按钮
设定识别部品用Fiducial 照相机的照明度。按下此按钮时,显示以下画面。
组合框
用于回转XY, Z轴驱动电动机选择移动到指定坐标位置的对象或用于选择想
要获取当前坐标的对象。可选择的对象如下。
基准相机1/2: 选择基准相机。
头1 ~ 头10: 选择1号 ~ 10号头。
<Move> 按钮
组合框中选择的对象移动到指定的坐标位置。此时,在点击 <Move> 按钮之
前应该用鼠标点击跟坐标有关的对象(Place Origin, MoveZ)。
<Get> 按钮
以组合框中选择的对象为基准获取 XY, Z轴坐标。此时,在点击 <Get> 按钮
之前应该用鼠标点击跟坐标有关的对象(Place Origin, MoveZ)。
<7. 板的大小> 领域
设定板的尺寸。
<X> 编辑框
输入PCB电路板的长度。
<Y> 编辑框
输入PCB电路板的宽度。
6-7
Board
定义
<传送轨道宽度> 按钮
可手动调整输送机的宽度。在旁边的编辑框中输入 Conveyor宽度后点击此
按钮,以相应尺寸调节 Conveyor 宽度。
备 注 本设备可以使用的PCB尺寸如下。
最大
510L×510W×4.2t [ mm ]
1,500L×460W [ mm ] - Option
最小
50L×40W×0.38t [mm]
<8. 操作> 领域
设定PCB的作业必要的各项数据。
<定位类型> 组合框
选择PCB的定位方法。
默认Default: 使用工作台上升,以便固定PCB基板。 本设备中无法使用
Edge Fixer(边缘定位): 利用安装在 传送装置的装置从侧面夹紧PCB
的方法来定位。
Edge Fixer 2(边缘定位2): 与” Edge Fixer 向”的定位方法同样,但它是
从侧面夹2次。 PCB机板的重量为1Kg以上时,请选择‘孔 Edge Fixer (边缘
定位2)’。
一点也不: 只使用 clamping方法固定 PCB
<移动高度 Z>
选择部件后,设置PCB机板的顶面以"0"为基准头部移动多少高度。
基本值为4 mm。但是贴装的部件高度大于4 mm,相应部件贴装到PCB机板
的高度输入成4mm单位。此值越大,工作时间就越长,请设置最佳值。
该值越高,因为工作时间较长,请设定最佳值。这是不可能的设置值小于
4mm,可以输入最多15毫米。