D-serie LEVEL II.pdf - 第205页
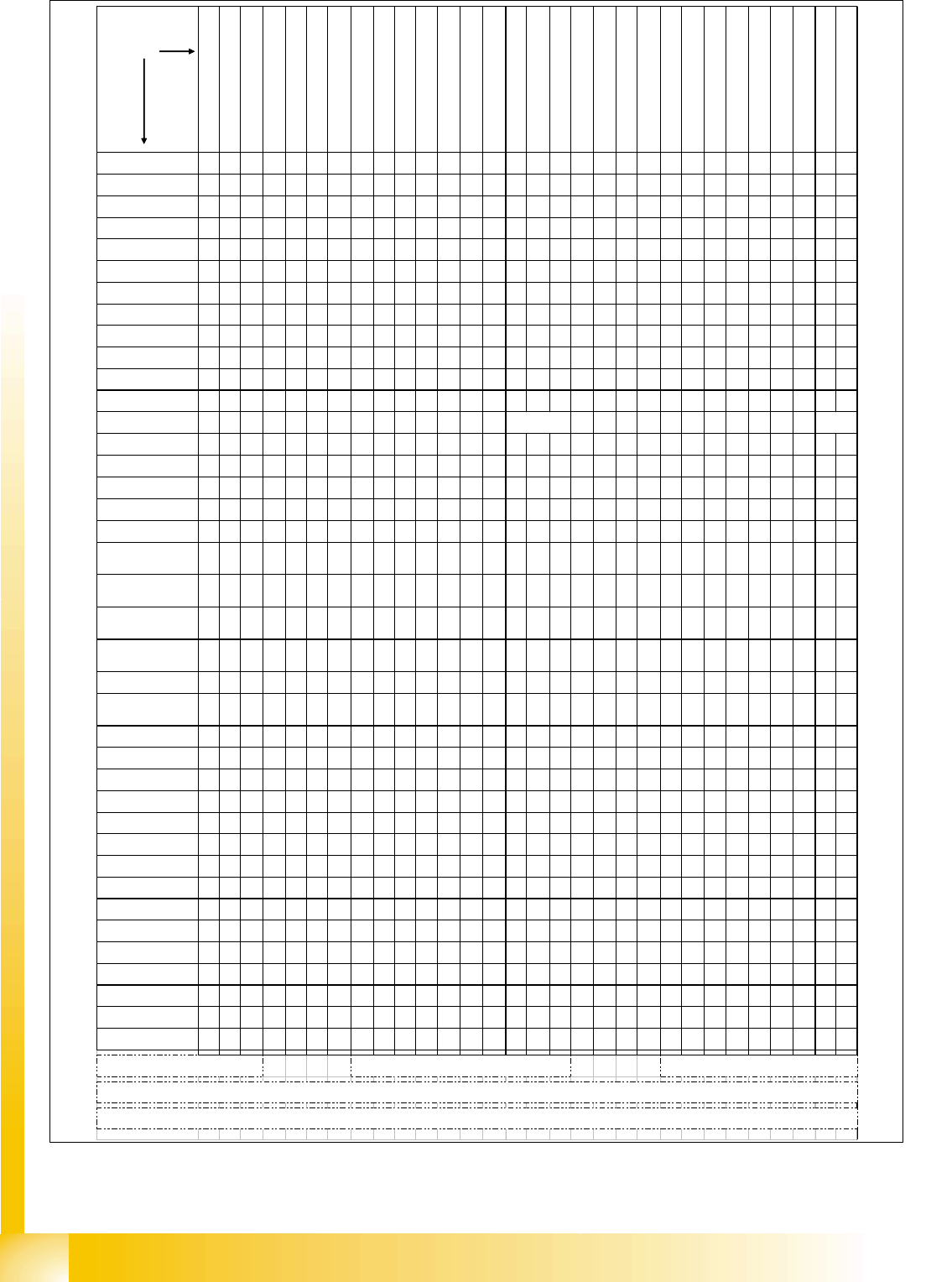
SITEST Overview of Settings and Calibr ation Work Overview SITEST S tude nt Guide Advanced Level 2 SIPLACE D Series EN 05/2007 SITEST 12-5 calibr ations fro m th e l e ft to th e r i g h t reasons for calibr ations Z ero…
SITEST
Overview SITEST Overview of Settings and Calibration Work
Student Guide Advanced Level 2 SIPLACE D Series
SITEST EN 05/2007
12-4
adjustments sequence
from the left to the right
reason for
adjustments
a
dj
us
t
reso
l
u
t
u
i
n pos
iti
on measur
i
ng
system Star-axis C&P-head
Z
ero po
i
n
t
corr.
Z
-ax
i
s
C&P
-
h
ea
d
(automatically done at reference)
Mount the place.star with power sup
ply and zero point gauge
Zero point corr. star-axis C&P-head
a
i
r
ki
ss supp
l
y
h
ose
0
.
7
mm a
b
ove
ballrace surface
a
i
r
ki
ss
t
u
b
es a
t
segmen
t
s
0
.
1
-
0
.
2
mm clearance to DP-encoder
Adjust 1,5mm clearance track signal
encoder DP-Axis to segment glas disc
Adjust motor position to 0,2 mm
clearance plunger to housing
Test upper end stop position Z-axis
Adj
us
t
th
e
1
.
3
mm c
l
earance
LB
bottom to the sleeve
Check belt tensions of refering axis
(different tension DLM1/2 C&P heads)
Align positionand adjust distance
(0.4mm) track signal encoder
Test track signals and Zero pulse at
the X / Y - axis
Set CAN-BUS address (gantry 1/2)
and other DIP-switches
Zero point corr Z-axis TWIN-head
Zero point corr. D- turning axis TWIN-
head
E
n
t
er
b
as
i
c
F
orce sensor parame
t
er
TWIN-head
Adjust the Anti-Crash-board(s)
Adjust the air kiss at placement-
and pick up (reject) circuit
Adjust the slow transport speeds
Adjust the PCB light barrier sensors
Adjust the LASER beam direction
Adjust the clamping (Piezo) sensor
Check & Adjust the clamping/
unclamping time o lifting table
Adjust the clamping height for PCB
(94,2 -0.2mm / 94.4 + 0.1 mm
Teach / store !!! New defaultposition for
fixed con. side (SIEMENS FSE only)
Download refering Firmware
(SIEMENS
FSE only)
Check & Adjust belt tension at the
refering PCB-conveyor
Check axis dynamic of referering axis
Check vacuum system if it is sealed
Replace stepper motor of
vacuum air kiss
D/X
/HF
Replace air kiss unit
D/X
/HF
Replace light barrier
bottom on Z-axis
D/X
/HF
Replace the motor / belt of
the Z-axis C&P
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
Replace the DP-station
D/X
/HF
Replace the track signal
encoder of the DP-station
D/X
/HF
D/X
/HF
Replace the vacuum
distributor
D/X
/HF
mech. Influence/Replace
the air kiss supply hose
D/X
/HF
Dismount/replace the
placement star DLM
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
Replace the star motor
D/X
/HF DLM
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
Replace C&P-head
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
head modularity (C&P
head exchange)
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
D/X
/HF
Replace Segment(s) of
TWIN-head
D/X
/HF
Replace Vision board at
gantry or for stationary
D/X
/HF
D/X
/HF
Replace C&P-Head
adapter board
D/X
/HF
D/X
/HF
Replace 'SLIO' board(s)
D/X
/HF
D/X
/HF
Replace Head interface
board (Head board)
D/X
/HF
Replace the
Portalinterface (conv.
D/X
/HF
D/X
/HF
D/X
/HF
Mechanical influence on
parallelity of fixed con.
side '1' to conv. frame
D/X
/HF
(*)
Mechanical influence on
straightness of fixed con.
side '1'
D/X
/HF
Set Single conv. mode for
dual conv. only for pure HF-
lines! Ask Siemens Service
D/X
/HF
Replace the encoder
X- / Y-axis
D/X
/HF
****
Count errors X- / Y-axis
(after cleaning)
D/X
/HF
D/X
/HF
Adjust conveyor speed to
the needs of customer
Placement process
D/X
/HF
D/X
/HF
Exchange Transport
control unit
D/X
/HF
Replace the light barrier for
PCB conveyor
D/X
/HF
D/X
/HF
Replace the LASER PCB-
Stopper
D/X
/HF
Replace clamping sensor
D/X
/HF
some exchange at lifting
table unit
D/X
/HF
Replace the conveyor
motor
D/X
/HF
Replace conveyor belt
D/X
/HF
Replace conveyor belt
guideance
D/X
/HF
Exchange control unit
Component table
D/X
/HF
Exchange control unit
Tape cutter
D/X
/HF*
Exchange control unit
coplanarity unit
D/X
/HF *
D/X
/HF
Exchange MVS 340
Vision controller
HF
**
Exchange Axis controller
board
D/X
/HF
Replace the Servo
amplifier board
D/X
/HF
Replace Anti Crash board
(X)
/HF
X/HFm
D1 & D3/X/HF
mit TWIN
D3/X/HF mit
TWIN
****
SIEMENS SERVICE LEVEL ONLY
for Single conveyor mode on Dual conv. We able to open to 410mm board width
(edit maximal width conv .1 to 410000) in REAL.MA without moving the fixed rail which is alligned to HS/S / F machines (for larger width change 'Hoehenverm_Y PG 1/2' too the deviation the conv. side is
***3x (BIO's /Appl.1 and different Appl. 2 ) per board
** automatic Download at loading 1st Feeder set up /1st
Boot
(0) The tension of the Z-belt at DLM1/2 C&P-heads adjusted to 280 +/- 10 Hz; the 10.000/8.000 C&P head Z-Belt is adjusted to 185 Hz.
* 2 Jumper code 4 possible addresses
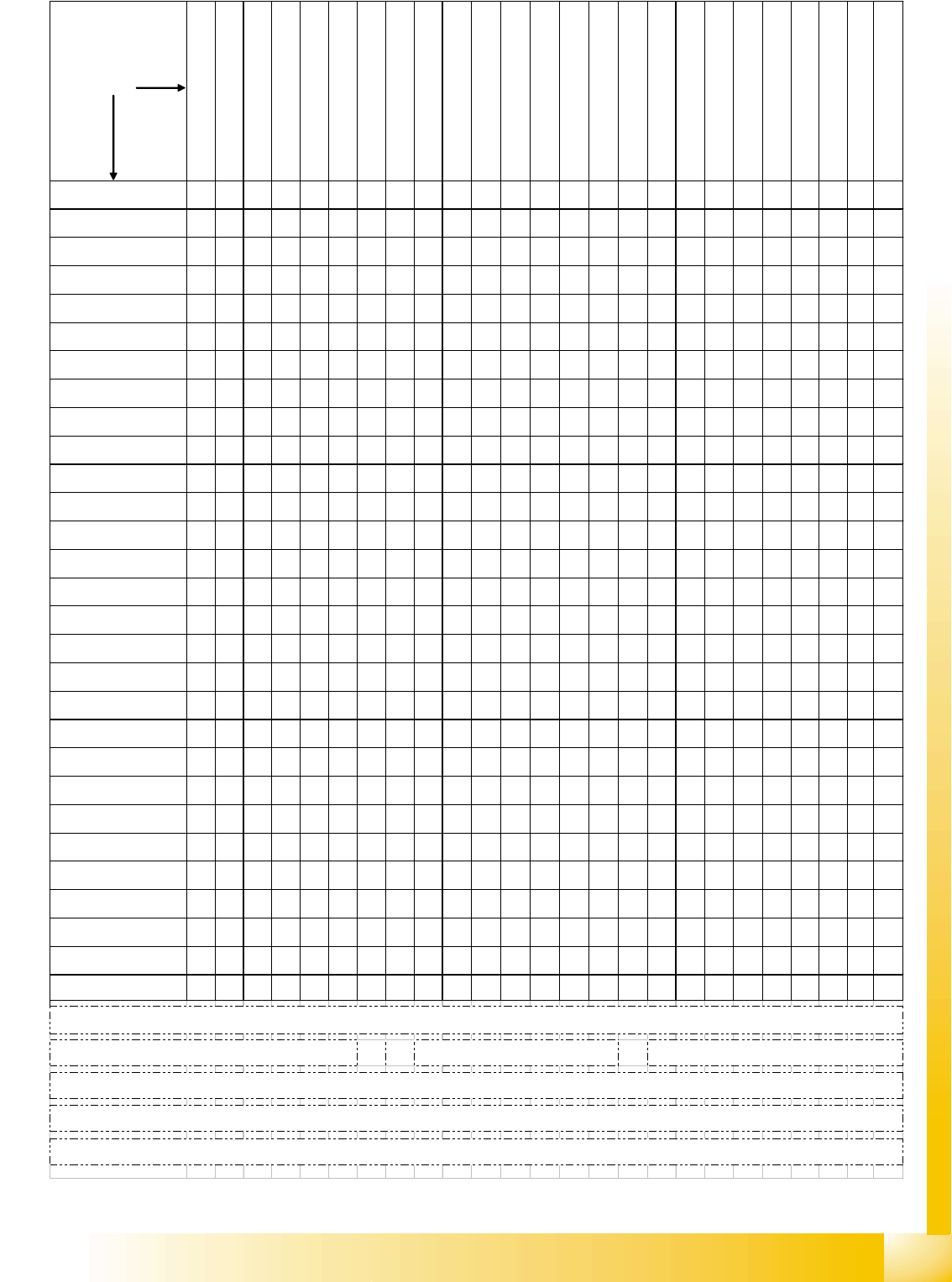
SITEST
Overview of Settings and Calibration Work Overview SITEST
Student Guide Advanced Level 2 SIPLACE D Series
EN 05/2007 SITEST
12-5
calibrations
from the left to the right
reasons for
calibrations
Zero point corr. star-axis C&P-head
Zero point corr. Z-/ D-axis and basic
force sensor parameter TWIN-head
Calibrate MA-zero point both gantries
of the Placement Area PAx
Calibrate PCB camera
Calibrate RV-head (include
component camera offset and
single measure ment segment offset
I (only for checking offset)
single measure ment segment offset
II (only for checking offset)
Calibrate TWIN Head IC-camera
Calibrate TWIN Head FC-camera
Calibrate coplanarity module (ILD
2200 1 D-version)
Calibrate Feeder area (for D1 WPC
is considered)
Calibrate fixed PCB-corner(s)
Calibrate moveable Conveyor Edges
(rail(s))
Calibrate calibration tool position
Calibrate TWIN-nozzle changer X/Y-
position
Calibrate TWIN-nozzle changer
Nozzle pick up height
Calibrate C&P-nozzle changer X/Y-
position
Calibrate C&P-nozzle changer Pick
up height
Calibrate vacuum TWIN head
Travel area X / Y axis
Execute PCB-Mappings
Execute RV-Mappings
Execute IC-Mappings
Fi
ne ca
lib
ra
ti
on
(if
p
l
acemen
t
accuraccy have to be increased at
Replace / remount PCB-
camera
D/X/
HF
D/X/
HF
D/X/
HF
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D/X/
HF
D/X/
HF
D/X/
HF
D1&D3
/X/ HF
w TH
D/X/
HF
D/X/
HF
Replace C&P-head
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
Remount C&P-head
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
Mechanical influence to the
segment guideance
D/X/
HF
D/X/
HF
New Star zero point
correction
D/X/
HF
D/X/
HF
D/X/
HF
compo-nent camera refer.
C&P head
D/X/
HF
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
Replace / remount
placement star
D/X/
HF
D/X/
HF
D/X/
HF
Replace / remount Star
motor
D/X/
HF
D/X/
HF
D/X/
HF
Replace / remount
Segment(s) TWIN-head
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
Replace / remount TWIN-
head IC-camera
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
Replace / remount TWIN-
head FC-camera
D1&D3
/X/ HF
w TH
encoder incremental scale
X/Y
D/X/
HF
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D/X/
HF
D/X/
HF
Replace / remount LASER
PCB stopper
D/X/
HF
New teaching of fixed PCB-
conveyor side (fixed rail)
D/X/
HF
D/X/
HF
Conveyor mode change
Right <--> Left side fixed
D/X/
HF
D/X/
HF
Use Dual conveyor in Single
conveyor mode **
D/X/
HF
D/X/
HF
Switch Dual conveyor to
dual conveyor mode
D/X/
HF
D/X/
HF
zero point & calib. jig
position
D/X/
HF
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D/X/
HF
D/X/
HF
D/X/
HF
D1&D3
/X/ HF
w TH
D/X/
HF
D/X/
HF
Replace / remount
component table
Replace / remount
coplanarity module
D1&D3
/X/ HF
w TH
mechanical influence to the
gantry
D/X/
HF
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D/X/
HF
D/X/
HF
D1&
D3/X
/HF
Replace / remount nozzle
changer TWIN-head
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
Replace / remount nozzle
changer C&P-head
D/X/
HF
D/X/
HF
Recalibrate machine zero
point (all gantries of a
PA
)
D/X/
HF
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D/X/
HF
D1&D3
/X/ HF
w TH
D/X/
HF
Head modularity 6/12 C&P
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
XH/
HF
Head modularity
C&P->TWIN
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D/X/
HF
XH/
HF
Head modularity
TWIN -> C&P
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D1&D3
/X/ HF
w TH
D/X/
HF
XH/
HF
Exchange Transport control
unit
D/X/
HF*
First setup (at munich)
D/X/
HF
D1&D3
/X/ HF
wTH
D/X/
HF
D/X/
HF
D/X/
HF
D1&D3
/X/ HF
wTH
D1&D3
/X/ HF
wTH
D1&D3
/X/ HF
wTH
D/X/
HF
D/X/
HF
D/X/
HF
D/X/
HF
D1&D3
/X/ HF
wTH
D1&D3
/X/ HF
wTH
D/X/
HF
D/X/
HF
D1&D3
/X/ HF
wTH
D/X/
HF
D/X/
HF
D/X/
HF
D1&D3
/X/ HF
wTH
D/X/
HF
XH/
HF
Whole calibration of the gantry after head-or head front part disassembling if increased placement accuracy is expected or placement deviation is too high
For the 6 nozzle C&P-head we use 956 nozzles like for the 12 nozzle head.
With 956 nozzles is the lower end of the calibration tool exact in the focus level of the C&P-head component camera. We use 956 for DCA-camera option too.
NOTE !! Calibration of the HS / S / F machines have a different sequence because there is the calibration reference the component camera on the gantry.
Because of construction here, on HF is the reference is the PCB-camera.
* afterTeaching the fixed side 'Right conveyor'
** up to 410 mm Standard to the HS/S/F machines nothing to
calibrate. For larger dimensions on pure HF-

SITEST
Calibration Basics Machine Zero Point
Student Guide Advanced Level 2 SIPLACE D Series
SITEST EN 05/2007
12-6
12.2 Calibration Basics
12.2.1 Machine Zero Point
The center of the PCB camera is used by the gantry as a reference point. All X/Y axis positions then
relate to this camera center point.
The reference point for the machine zero point is a drilling next to the calibration tool rest.
As soon as the PCB camera of the relevant gantry is positioned over the center of this drilling and
the drilling center has been optically centered, the gantry position will be set exactly to the following
values:
MA zero point_x_PG1 739500 / MA zero point_y_PG1 662400.
MA zero point_x_PG2 1303500 / MA zero point_y_PG2 1248400
(PG means gantry group)
12.2.2 PCB Camera
The pixel size of the CCDx sensor is determined (in µm)
The calculation takes into account the Ax/Bx/Cx/Ay/ByCy calibration values. The data is saved at
camera.xml
in nm (i.e. 1 pixel 11.7x11.7 µm)
The pixel size is:
approx. 11770 nm for the standard camera SST 34,
approx. 11770 nm for the multicolor PCB camera SST 24,
The camera center is determined.
This camera center point is now the reference point for all machine positions!
The angle of the CCD sensor in the PCB camera to the machine coordinate system. The value is
saved as
Position_angel
in the PCB camera data block, at
camera.xml
.
12.2.3 Position of Calibration Tool
Calibrate the X and Y pick up position of the calibration tool.