KE-3010_20V_使用说明书.pdf - 第161页
第 1 部 基本編 第 2 章 生产 2-28 < XL 基板规格> ① IN 传感器 ⑦传送电磁阀 ⑬ 支撑销 ② OUT 传感器 ⑧传送马达 ⑭ 自动调整宽度马达 ③ WAIT 传感器 ⑨驱动轴 ⑮ Y 夹杆 ④ STOP 传感器 ⑩挡块 ⑯ 减压阀 ⑤ C-OUT 传感 器 ⑪ 定心销(选购项) ⑰ 操作轴 ⑥支撑台原点传感器 ⑫ 支撑台 ⑦ ⑯ ① ② ①② ③ ④ ⑤ ⑥ ⑧ ⑧ ⑧ ⑨ ⑨ ⑨ ⑩ ⑪ ⑪ ⑫ ⑬ ⑭ ⑮ ⑰…
第 1 部 基本編 第 2 章 生产
2-27
2-7-1-1 传送部的构成
(1)当为“外形基准”时
1) 搬入基板,IN 传感器①检出基板后,传送马达⑧便驱动驱动轴⑨,通过传送带开始传送。
同时,挡块⑩变为 ON。
2) 基板到达挡块⑩时,被停止传感器④检测出,支撑台⑫上升。
此时,基板外形被挡块⑩、Y 夹杆⑮、支撑销⑬固定住。暂时固定后,挡块⑩OFF,完成基板固
定。
3) 固定后,下一块基板同样被送进,在待机传感器③的位置等待。
4) 生产完成后解除固定,开始搬出。
5) 最初的基板在通过 C-OUT 传感器⑤时,挡块⑩再次变为 ON,准备固定下一块基板。
(2)当为“销基准”时
搬入动作与外形基准相同,使用安装在支撑台⑫的定心销⑪、支撑销⑬来固定。
搬出动作与外形基准相同。
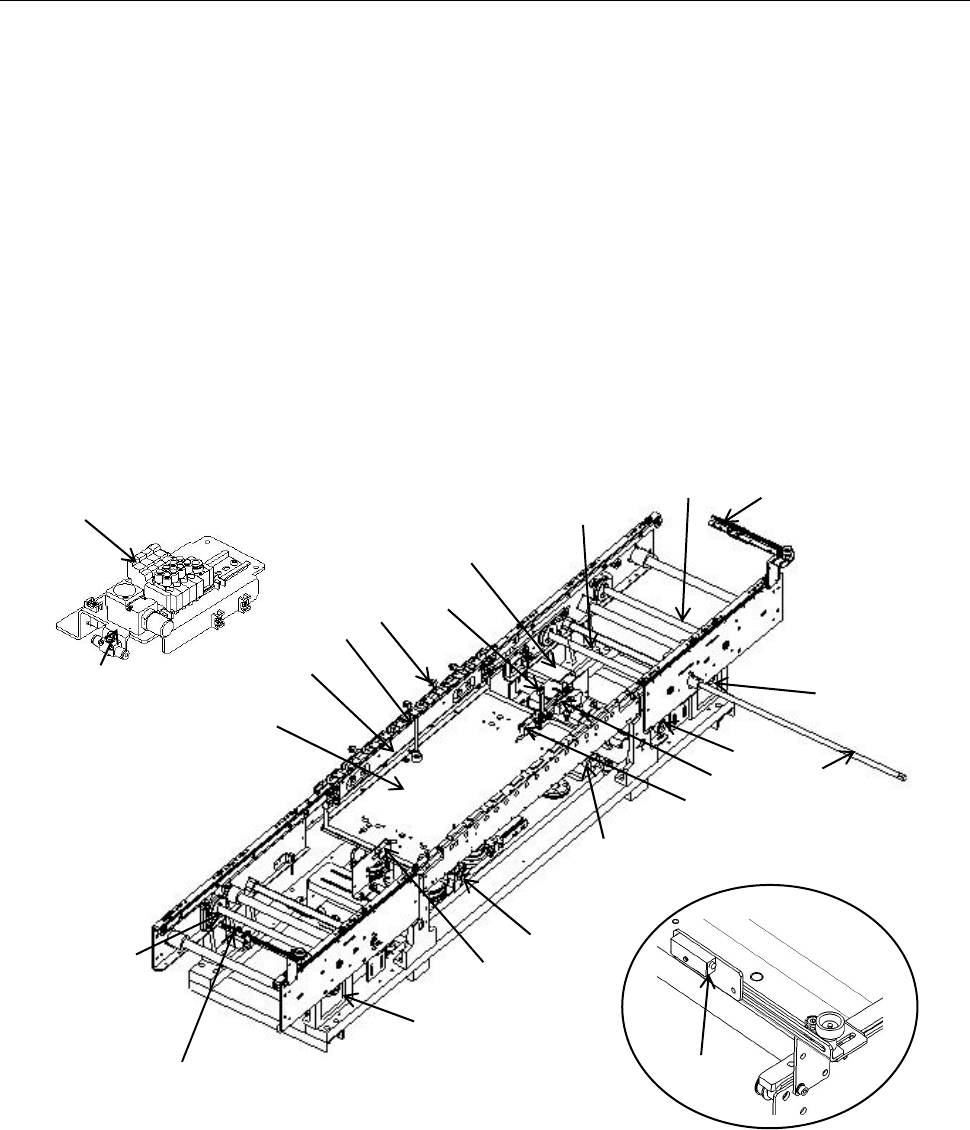
<M,L 基板规格>
①IN 传感器 ⑦传送电磁阀 ⑬支撑销
②OUT 传感器 ⑧传送马达 ⑭自动调整宽度马达
③WAIT 传感器 ⑨驱动轴 ⑮Y 夹杆
④STOP 传感器 ⑩挡块 ⑯减压阀
⑤C-OUT 传感器 ⑪定心销(选购项) ⑰操作轴
⑥支撑台原点传感器 ⑫支撑台 ⑱传感器功放
①
②
①②
③
④
⑤
⑥
⑧
⑧
⑧
⑨
⑨
⑨
⑩
⑪
⑪
⑫
⑬
⑭
⑮
⑰
⑦
⑯
第 1 部 基本編 第 2 章 生产
2-28
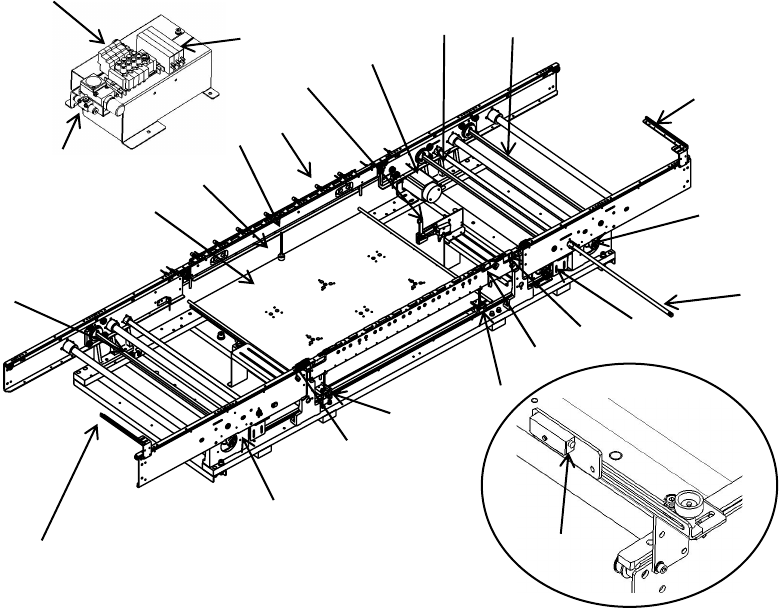
<XL 基板规格>
①IN 传感器 ⑦传送电磁阀 ⑬支撑销
②OUT 传感器 ⑧传送马达 ⑭自动调整宽度马达
③WAIT 传感器 ⑨驱动轴 ⑮Y 夹杆
④STOP 传感器 ⑩挡块 ⑯减压阀
⑤C-OUT 传感器 ⑪定心销(选购项) ⑰操作轴
⑥支撑台原点传感器 ⑫支撑台
⑦
⑯
①
②
①②
③
④
⑤
⑥
⑧
⑧
⑧
⑨
⑨
⑨
⑩
⑪
⑪
⑫
⑬
⑭
⑮
⑰
⑱
第 1 部 基本編 第 2 章 生产
2-29
2-7-1-2 传送轨道宽度的调整
<手动调整方法>
(1) 请调整传送的宽度。
请将操作手柄安装到操作轴上,调整宽度(“基板宽度+0.5mm ~ 1mm”)以使基板顺畅通过。
(2) 请确认在传送轨道所有区域中基板均能顺畅运动。
(3) 调整结束后,请拆下操作手柄。
(4) 请从搬送轨道上取出基板。
如果使用操作手柄手动变更传送的宽度,传送传感器仍出现异常时,请进行传感器调节。
详细情况,请参见「2-12-1-3 传送控制」及「第 9 章 手动控制」的「9-5-1 传送控制」的
各项目。