KE-3010_20V_使用说明书.pdf - 第441页
第 1 部 基本编 第 4 章 制作生产程序 4-3-3-4- 2 支撑台画面 在选择 “ 传送 设置 ” 选项卡的 状态下,选择 “ 支撑台 ” 选项 卡时,会显示如 下画面。 “ 支撑台 ” 选项 卡由 “ 支撑台控制 ” 项目 组成。 “ 支撑台控制 ” 项目组的各 项目内容如下所示 。 (1) 不使用 / 使用 对是否使用在左 / 右站点支撑台控制中设置 的内容进行选择 。 ◆ 不使用 :不使用在左 / 右 站点支撑台控 制中设…

第 1 部 基本编 第 4 章 制作生产程序
(3)
延迟单位
从时间(ms:1/1000 秒)、长度(mm)中选择基板传送传感器延迟的设置值的单位。
◆
时间
: 延迟时间设置值的单位为时间(ms:1/1000 秒)时,请选择此项。
◆
长度
: 延迟时间设置值的单位为长度(mm)时,请选择此项。
(4)
标准
在“
设置传感器延迟时间
”中选择“标准”时,要设置延迟时间或长度。
可设置的值为 0~2500(ms)、0~1000(mm)。
(5)
选项
在“
设置传感器延迟时间
”中选择“选项”时,要分别设置 IN 传感器、WAIT 传感器、STOP 传感器、
C-OUT 传感器、OUT 传感器的延迟时间或长度。
可设置的值为 0~2500(ms)、0~1000(mm)。
(6)
准备进入信号延迟时间
当从后工序输入的接受基板搬出信号Ready IN 信号为 ON 时将不停止基板向下一个工序送出。但
若设置了此项延迟时间后,当 OUT 传感器检测出有基板时,则会先暂停,在经过设置的时间后
Ready IN 信号为 ON,并且马达再次旋转时,才进行基板的传出。此项设置对传送速度不相同的
机器间的基板交接有效。另外,此时间是从 OUT 传感器为 ON 后开始计算的时间。
(7)
再固定时忽略停止传感器
设置当发生传送带浮动等生产异常结束、生产再启时,不去除基板而进行再钳夹时的延迟时间。
可分别设置左站点、右站点。可设置的值为 0~500(ms)、0~200(mm)。
“
传送马达速度控制
”
项目组的各项目内容如下。
(8)
不使用
/
使用
对是否使用在传送马达速度控制中设置的内容进行选择。
◆不使用
:不使用传送马达速度控制中设置的内容时,请选择此项。
按主机设置的内容(「机器设置」-「传送设置内容」)运行。
◆使用
:使用在传送马达速度控制中设置的内容时,请选择此项。
(9)
传送中
设置将基板搬入传送到中央缓冲区时的传送速度。
(10)
后工序搬出时
对完成贴片后基板向下一个工序传出时的传送速度进行设置。
“
选项
”
项目组各项目的内容如下所示。
(11)
不使用
/
使用
对是否使用等待传感器缺口基板对应功能进行选择。
◆
不使用
: 不使用等待传感器缺口基板对应功能时,请选择此项。
按主机设置的内容(「机器设置」-「传送设置内容」)运行。
◆
使用
: 使用等待传感器缺口基板对应功能时,请选择此项。
(12) WAIT
传感器缺口基板对应功能
勾选此项时,等待传感器的缺口基板对应功能有效。
取消此项勾选时,该功能无效。
4-35
第 1 部 基本编 第 4 章 制作生产程序
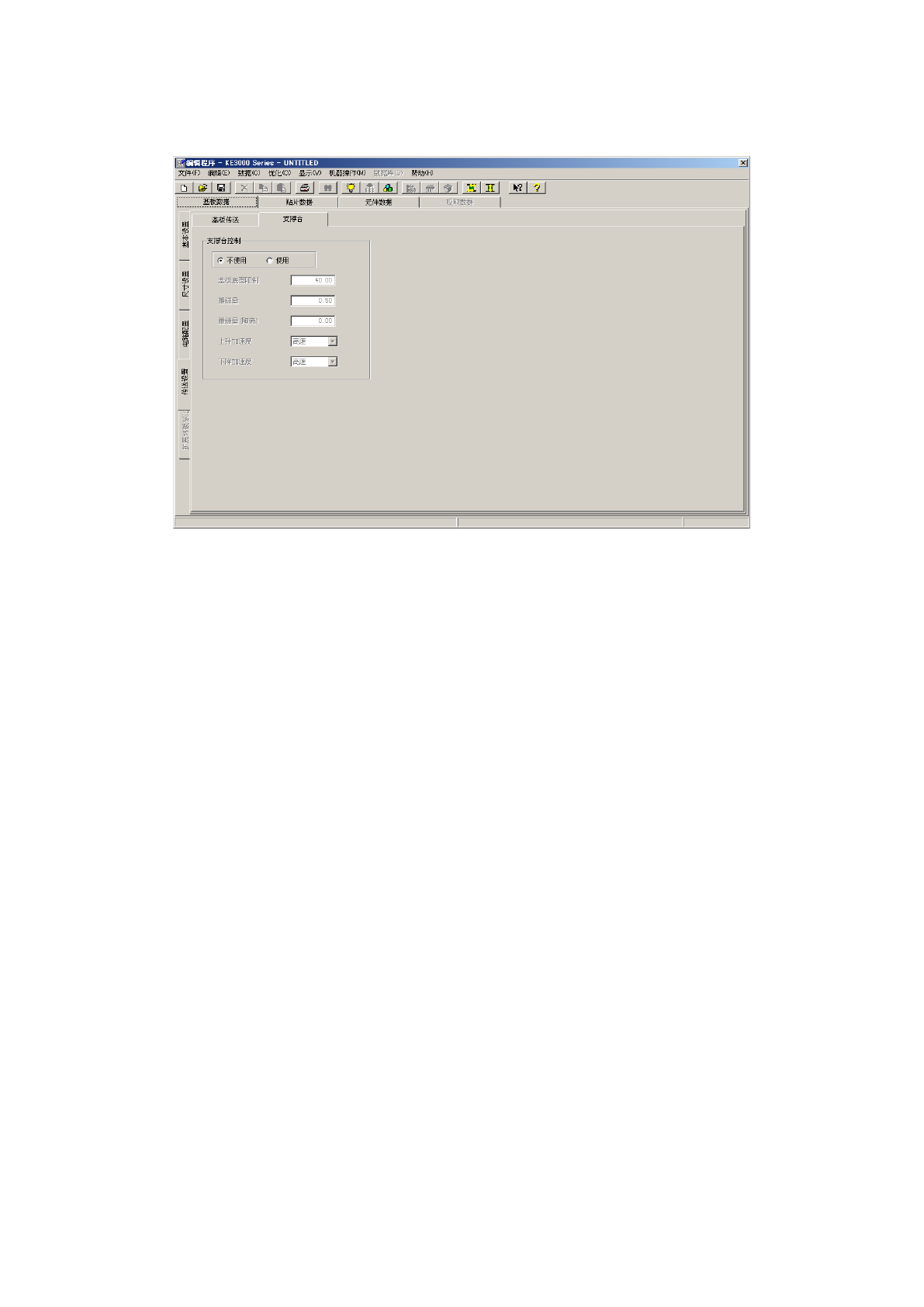
4-3-3-4-2 支撑台画面
在选择“传送设置”选项卡的状态下,选择“支撑台”选项卡时,会显示如下画面。
“支撑台”选项卡由“支撑台控制”项目组成。
“
支撑台控制
”
项目组的各项目内容如下所示。
(1)
不使用
/
使用
对是否使用在左/右站点支撑台控制中设置的内容进行选择。
◆
不使用
:不使用在左/右站点支撑台控制中设置的内容时,请选择此项。
按主机设置的内容(「机器设置」-「传送设置内容」)运行。
◆
使用
:使用在左/右站点支撑台控制中设置的内容时,请选择此项。
(2)
基板底面限制
设置支撑台的基板下降限制值。
可设置的值为 5.0~40.0(mm)。
(3)
推进量
输入支撑台上升时的偏移值。
支撑销将按照设置的值向上方向推顶基板。
可设置的值为 0.0~5.0(mm)。
(4)
推进量(陶瓷)
輸入使用陶瓷基板期间支承台上升时的偏差值。
支撑销将按照设置的值向上方向推顶基板 。
可设置的值为 0.0~5.0(mm)。
(5)
上升加速度
设置支撑台上升时的加速度。
(6)
下降加速度
设置支撑台下降时的加速度。
4-36
第 1 部 基本编 第 4 章 制作生产程序
7mm
7mm
10mm
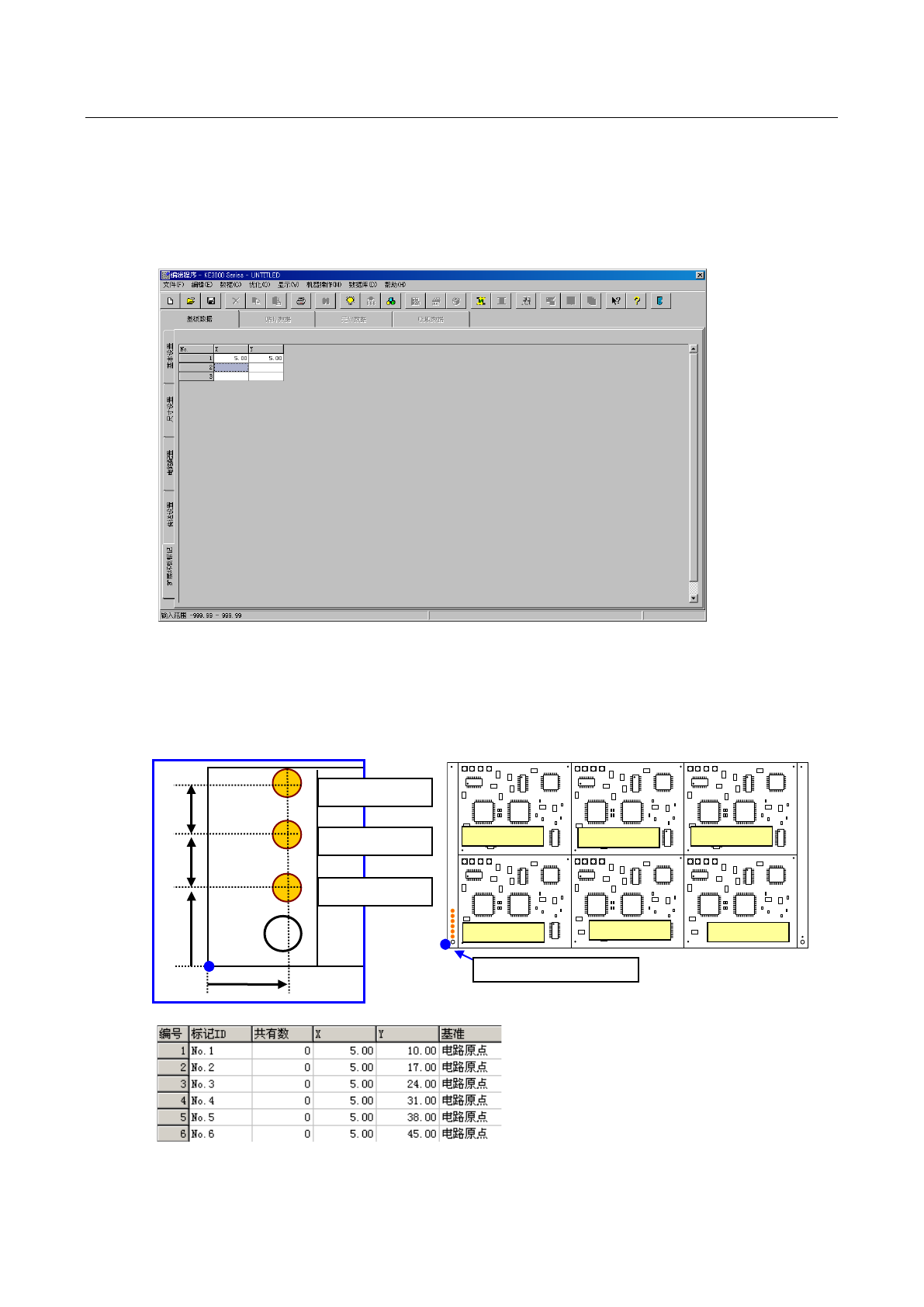
4-3-3-5 扩展坏板标记
在扩展坏板标记中,要输入从「基板基准位置」到各电路对应的「坏板标记」的位置。
请在识别时伴随的 Head 的移动距离缩短,或是不可能制作到电路内的标记时使用。
输入使用扩展坏板标记时的各电路的坏板标记坐标。
选择“基板数据”各画面左下的“扩展坏板标记”选项卡时,显示如下画面。
◆ 矩阵电路板
从基准电路开始沿 X 方向间距/Y 方向间距作为电路的顺序。
电路
No.1
电路No.2
电路No.3
电路
No.4
电路No.5
电路No.6
基板位置基准(基板原点)
对应电路No.3
对应电路No.2
对应电路No.1
5mm
4-37