KE-3010_20V_使用说明书.pdf - 第665页
第 1 部 基本编 第 4 章 制作生产程序 4-5-4-7-2 吸取位置 / 吸取高度 通过摄像机跟踪 吸取位置。 确认监视器中显 示的吸取位置, 当输入坐标不 准确时,可通过 示教进行修正 。 此外,可 以通过使用 H MS 跟踪吸取高度 。此时,画面 上依次显 示从 H MS 获得的 检测值。 当高度有明显差 异时,请与坐标 示教一样,进 行高度值示教。 (1) 设置条件 从菜单栏中选择 “ 机器操作 ”/“ 跟踪 ”/“ 吸取位…
第 1 部 基本编 第 4 章 制作生产程序
(4)
跟踪时的操作
执行时可使用以下开关/按钮来控制动作。
操
作
操作面板
画面
跟踪开始
<START>
开关
“
执行
”
按钮
跟踪停止
<STOP>
开关
移动到前一点
“Previous”
按钮
移动到下一点
<START>
开关
“Next”
按钮
结束
在停止时按
<STOP>
开关
在停止时按
“
取消
”
按钮
通过上述的操作结束后,显示如下提示信息。
(5)
显示叠加画面
在执行时,每一贴片点都会在叠加画面中显示适合元件尺寸的元件框。
如果元件很大,则不显示元件框,而会使用摄像机依次显示元件的 4 角及中心位置。
如下表所示,元件尺寸不同,显示在监视器中的元件中心及四角的显示有所不同。
元件尺寸
元件的四角
元件的中心
短边 4.5mm 以下的元
件
在画面中的窗口框里显示。设定了角度
的贴片点通过窗口框本身的旋转来显
示。
十字线的中心
上述元件以外的元件
(大型元件)
分别按照
[TOP-L]
、
[TOP-R]
、
[BTM-R]、
[BTM-L]的顺序移动到四角坐标上。设定
了角度的贴片点移动到四角旋转过的坐
标上。
四角移动后,最后移动到显示
着[CENTER]的中心。
(6)
跟踪时的坐标示教
如果跟踪的坐标与实际不同时,通过在触摸屏的叠加画面上触摸,可进行示教。可上下左右、斜
向 8 方向移动。移动速度可用“低速”、“中速”、 “高速”按钮进行切换。
按“ENTER”按钮,即可取得当前位置的坐标,反映到生产程序数据里。
显示元件的中心及元件的四角的框。
4-259

第 1 部 基本编 第 4 章 制作生产程序
4-5-4-7-2 吸取位置/吸取高度
通过摄像机跟踪吸取位置。
确认监视器中显示的吸取位置,当输入坐标不准确时,可通过示教进行修正。
此外,可以通过使用 HMS 跟踪吸取高度。此时,画面上依次显示从 HMS 获得的检测值。
当高度有明显差异时,请与坐标示教一样,进行高度值示教。
(1) 设置条件
从菜单栏中选择“机器操作”/“跟踪”/“吸取位置”,会显示如下画面。
另外,从菜单栏中选择“机器操作”/“跟踪”/“跟踪吸取高度”,在「跟踪吸取高度」
勾选的状态下,会显示上述画面。
1)
执行模式
a)
摄像机跟踪吸取位置
用摄像机跟踪吸取位置。
b)
跟踪吸取高度
执行跟踪吸取高度。
* 勾选了两者的执行模式时,执行摄像机跟踪吸取位置后,执行跟踪吸取高度。
4-260
第 1 部 基本编 第 4 章 制作生产程序
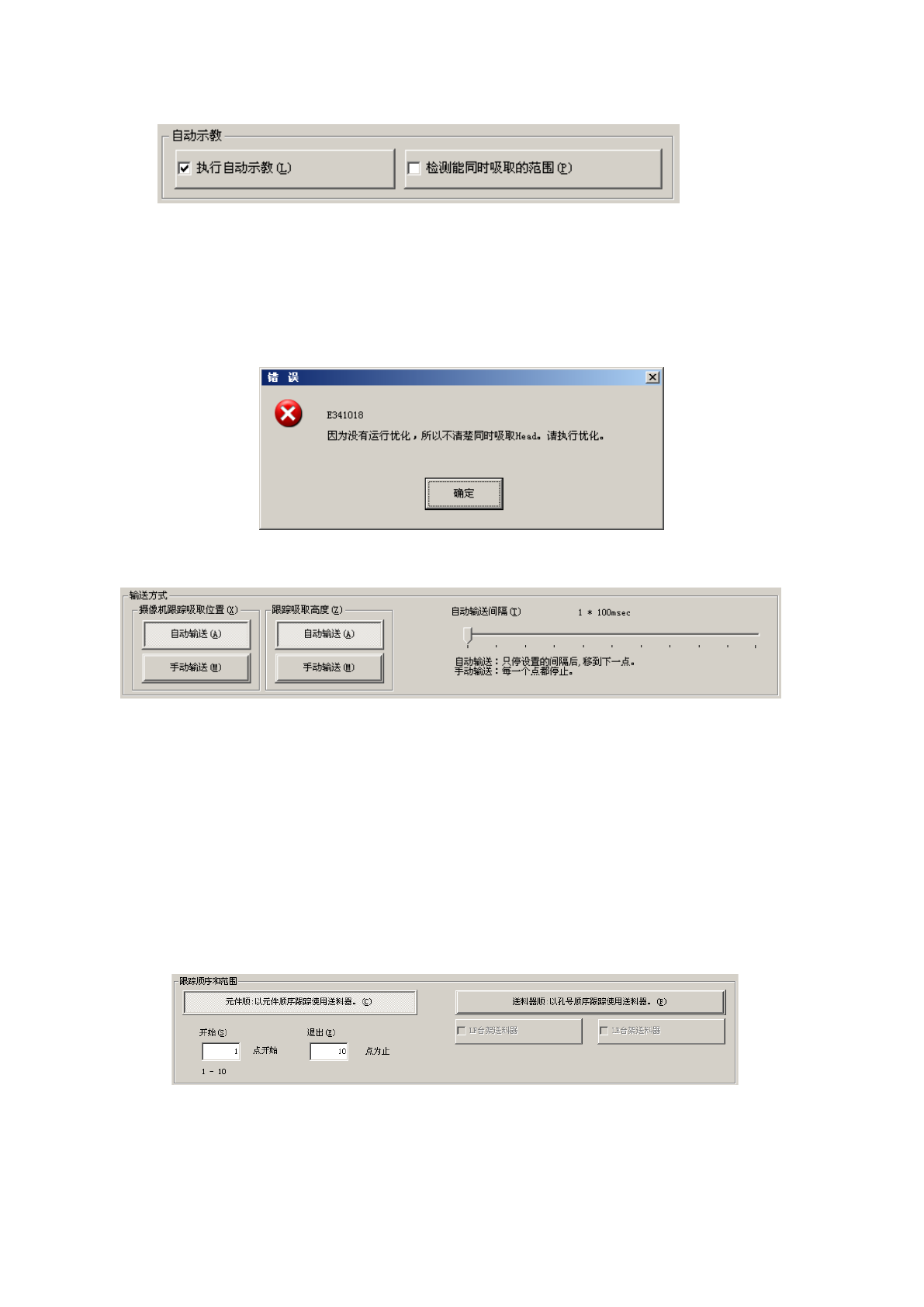
2)
自动示教
a)
执行自动示教
执行自动示教。
b)
检测能同时吸取的范围
检查能否同时吸取。需要先执行优化。若未执行优化而按下按钮时,会显示错误提示,要求
执行优化。
3)
输送方式
a)
自动输送
用摄像机或 HMS 以一定的间隔依次捕获吸取位置。按以下的“自动输送间隔”设定的时间停止,
经过设定时间后移动到下一点。
●
自动输送间隔:
调整停止间隔。可以设置为 0.1 秒(100ms)~20 秒。
b)
手动输送
在吸取位置的每一点停止。保持当前位置停止状态,直至用户进行输送操作。
在吸取位置摄像机跟踪画面里,按“Previous”按钮会返回到前一个吸取点,按“Next”按钮或
<START>开关会移动到下一个吸取点。
4)
跟踪顺序与范围
a)
元件顺序
输入跟踪范围从元件数据的编号中的开始点直至结束点。
初始设定为对所有元件进行跟踪。
b)
供料器顺序
对跟踪位置按台架单位进行指定。
4-261