KE-3010_20V_使用说明书.pdf - 第899页
第 2 部 功能详解编 第 9 章 手动控制 9-31 9-5-1-1 控制对象:基板传送 按下 “ 基板传送 ” 按钮,会显示如下画面。 (1) 状态 显示传送马达 / 传感器的 ON 、 OFF 状态。 (2) 控制项目 点击 “ 执行 (E)” 按钮,或按下 “F3” 键后,开始执行控制处理。 1) 初始化 将基板传送进行初始化。 2) 基板搬入 按定位方式指定的方式搬入基板。 3) 基板搬出 搬出基板。 4) 基板固定解除 释放…
第 2 部 功能详解编 第 9 章 手动控制
9-30
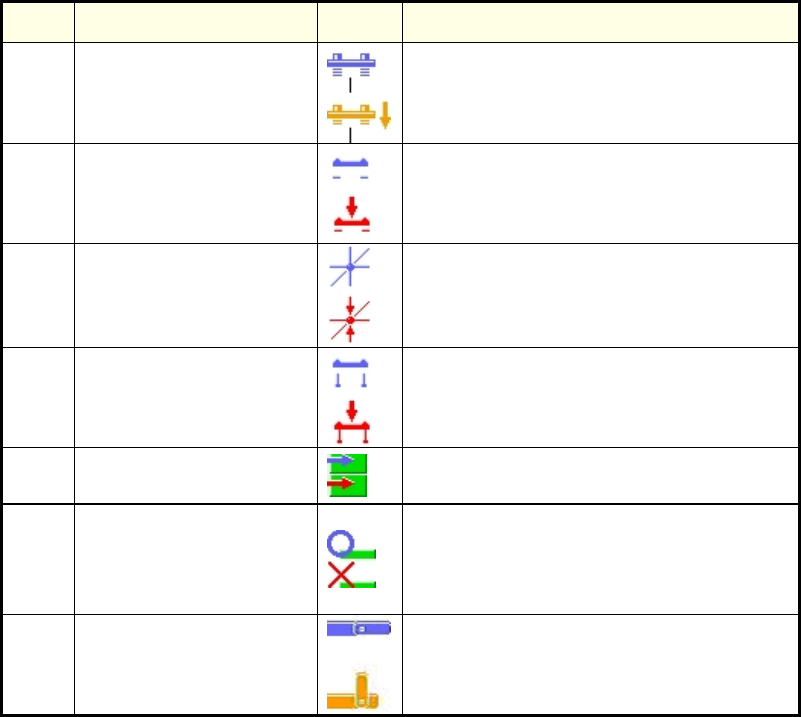
其他传感器的显示列表如下。
No.
显示项目 显示图 表示内容
1
外形基准气缸
外形基准气缸处于 OFF 状态。
外形基准气缸处于 ON 状态。
2
支撑台挡块(CE 机)
支撑台挡块处于 OFF 状态。
支撑台挡块处于 ON 状态。
3
支撑台原点传感器
支撑台处于 OFF 状态。
支撑台处于 ON 状态。
4
传送挡块干涉传感器
传送挡块干涉传感器处于 OFF 状态。
传送挡块干涉传感器处于 ON 状态。
5
准备输入(Ready In )
准备输出(Ready Out )
准备输入(Ready In )处于 OFF 状态。
准备输出(Ready Out )处于 ON 状态。
6
能搬入基板
(Board Available In)
能搬出基板
(Board Available Out)
Board Available In·OUT 处于 OFF 状态。
Board Available In·OUT 处于 ON 状态。
7
停止挡销
停止挡销处于 OFF 状态。
停止挡销处于 ON 状态。
第 2 部 功能详解编 第 9 章 手动控制
9-31
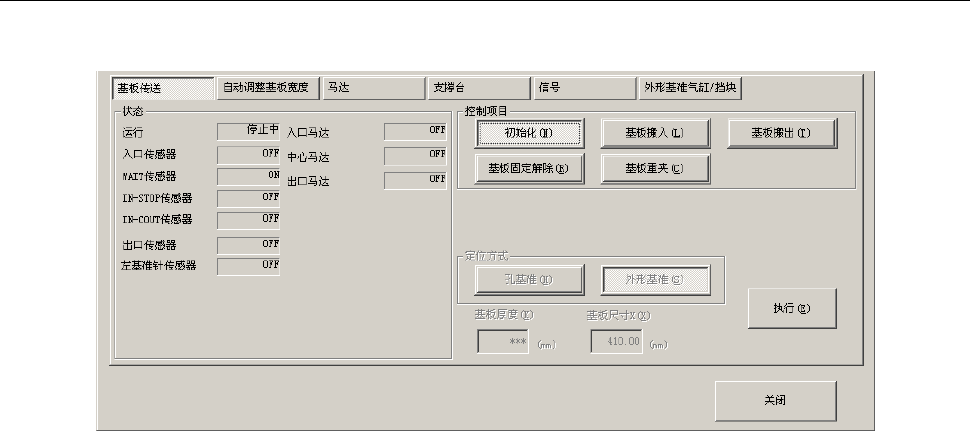
9-5-1-1 控制对象:基板传送
按下“基板传送”按钮,会显示如下画面。
(1) 状态
显示传送马达/传感器的 ON、OFF 状态。
(2) 控制项目
点击“执行(E)”按钮,或按下“F3”键后,开始执行控制处理。
1)初始化
将基板传送进行初始化。
2)基板搬入
按定位方式指定的方式搬入基板。
3)基板搬出
搬出基板。
4)基板固定解除
释放基板。
5)基板重夹
用在定位方式中指定的方式对传送通道上的基板进行重夹。
(3) 定位方式
通过单选按钮选择定位方式。
控制项目中的“初始化”、“基板搬出”、“基板固定解除”被选中时,将无法设置此项。
(4) 执行
开始控制。
第 2 部 功能详解编 第 9 章 手动控制
9-32
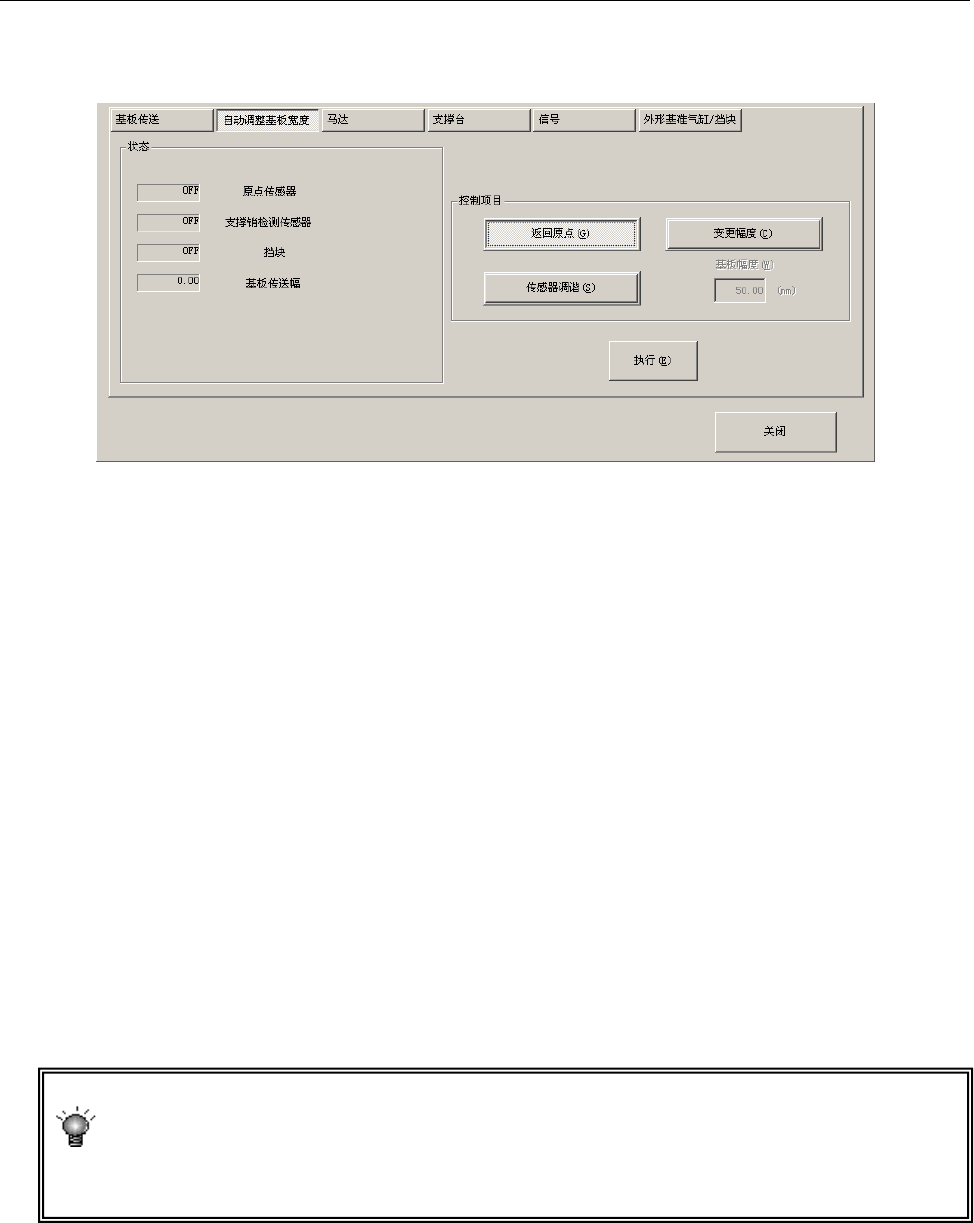
9-5-1-2 控制对象:自动调整基板宽度
按下“自动调整基板宽度”按钮,会显示如下画面。
此外,传感器调谐仅在 XL 基板规格中为可选项目。
若机器设置的[使用单元]未勾选「自动调整基板宽度」,在 M 基板/L 基板/L-Wide 基板规格时不被
显示,在 XL 基板规格时,控制项目中除了传感器调谐外其他项目均无效。
(1) 状态
显示各传感器、基板传送宽度的状态。
(2) 控制项目
点击“执行(E)”按钮,或按下“F3”键后,开始执行控制处理。
1)返回原点
自动调整基板宽度恢复原点。
2)变更幅度
变更传送宽度。
3)传感器调谐(仅 XL 基板规格)
调整传送传感器。
(3) 执行
开始控制。
先用手把,把传送通道扩大到最大宽度后,再执行传感器调谐。
在传送通道窄的状态下进行传感器调谐,或在原状态下未进行传感器调谐就扩大传送通
道时,则会无法传送基板。