00196692-03_UM_SX4DX4_SR706_DE.pdf - 第118页
3 Technische Daten und Baugruppen Betriebsanleitung SIPLACE SX4/DX4 3.5 Bestückkopf Ab Softwareversion SR.706.xx Ausgabe 06/2012 DE 118 3 Abb. 3.5 - 5 SIPLACE MultiS tar - Rückansicht, Funktionsgruppen T eil 3 (1) Bauele…
Betriebsanleitung SIPLACE SX4/DX4 3 Technische Daten und Baugruppen
Ab Softwareversion SR.706.xx Ausgabe 06/2012 DE 3.5 Bestückkopf
117
3
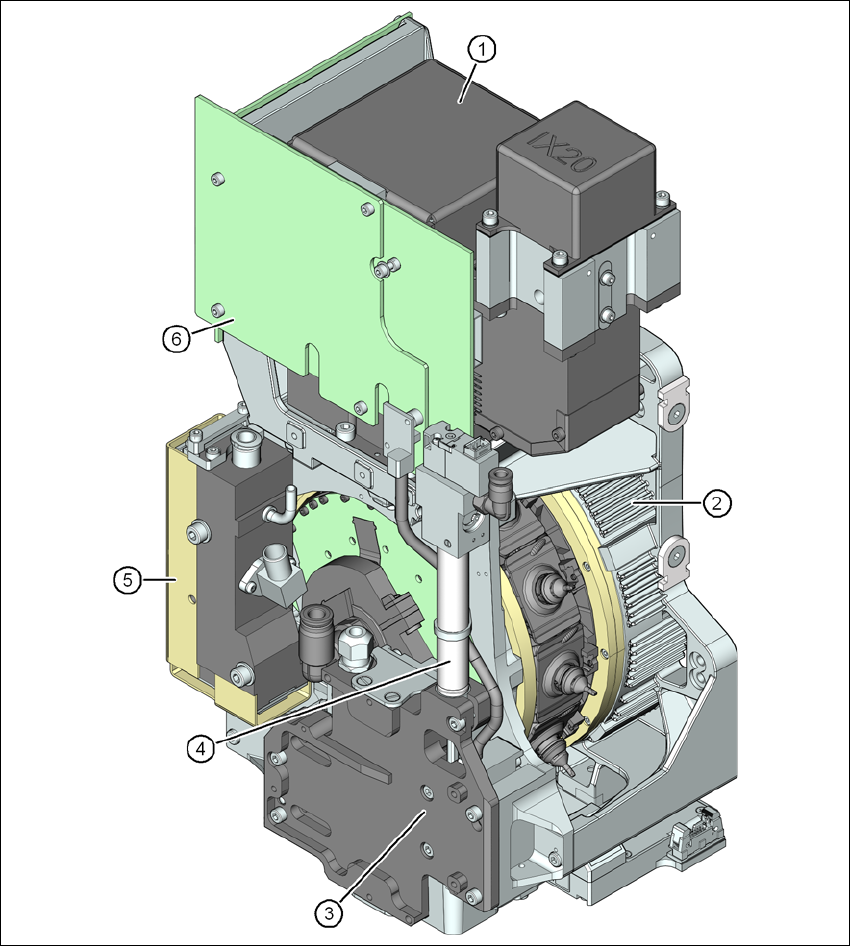
Abb. 3.5 - 4 SIPLACE MultiStar - Vorderansicht, Funktionsgruppen Teil 2
(1) BE-Kamera C&P, Typ 30, 27 x 27, digital
(2) Torquemotor für den Sternantrieb
(3) Z-Antrieb (Linearmotor)
(4) Rückholzylinder
(5) Druckregelventil
3 Technische Daten und Baugruppen Betriebsanleitung SIPLACE SX4/DX4
3.5 Bestückkopf Ab Softwareversion SR.706.xx Ausgabe 06/2012 DE
118
3
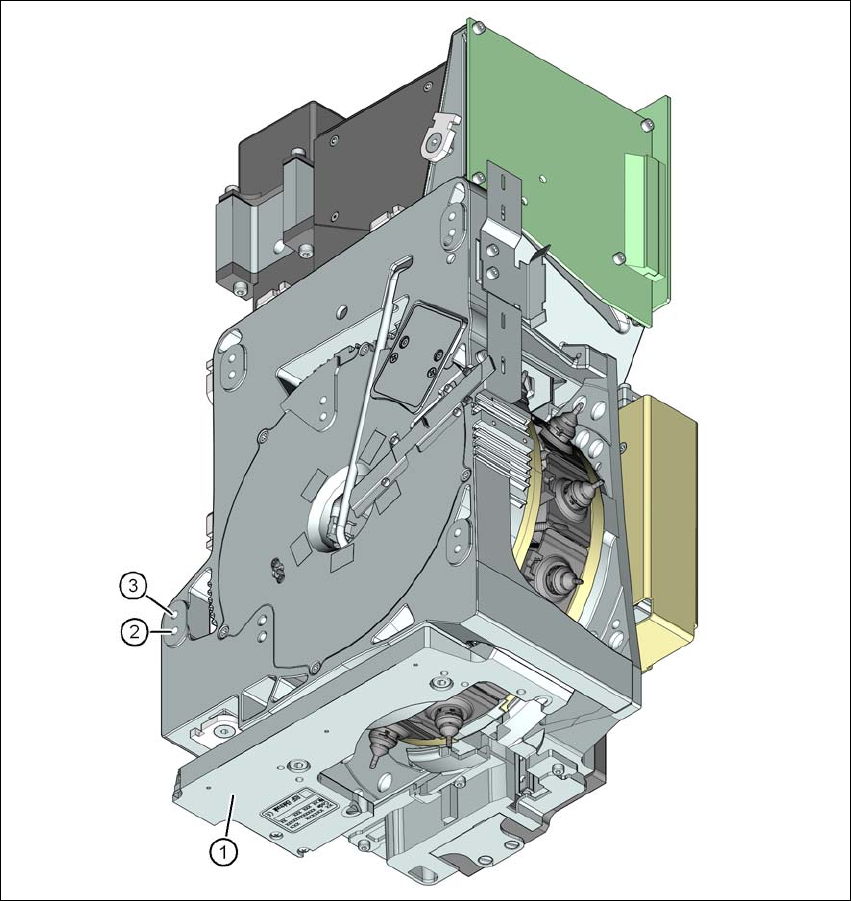
Abb. 3.5 - 5 SIPLACE MultiStar - Rückansicht, Funktionsgruppen Teil 3
(1) Bauelementesensor
(2) Montageposition für eine BE-Höhe bis 11,5 mm
(3) Montageposition für eine BE-Höhe bis 6 mm
Betriebsanleitung SIPLACE SX4/DX4 3 Technische Daten und Baugruppen
Ab Softwareversion SR.706.xx Ausgabe 06/2012 DE 3.5 Bestückkopf
119
3.5.2.1 Beschreibung
Der MultiStar vereint die beiden gegensätzlichen Eigenschaften wie hohe Bestückleistung und
hohe Flexibilität. Bei kleinen Bauelementen bis 27 mm x 27 mm arbeitet der MultiStar nach dem
Collect&Place-Verfahren, das heißt mit hoher Bestückleistung. Dazu werden die Bauelemente mit
der integrierten BE-Kamera optisch zentriert. Bei großen Bauelementen bis 50 mm x 40 mm ar-
beitet der Bestückkopf nach dem Pick&Place-Prinzip, wobei die Bauelemente mit der stationären
Kamera optisch zentriert werden.
Die Kombination der beiden Bestückprinzipien C&P und P&P gab dem MultiStar seinen Namen.
Er wird kurz als CPP-Kopf bezeichnet.
Die 12 Segmente des CPP-Kopfes sind sternförmig angeordnet. Ein Torquemotor mit hohem
Drehmoment dreht den Stern um die horizontale Achse, die Sternachse.
Jedes Segment besitzt einen eigenen DP-Antrieb zum Rotieren der Pipette. Die Pipetten werden
deshalb nicht mehr an einer einzigen Kopfstation in die richtige Lage gedreht. Sie können jeder-
zeit und unabhängig voneinander in ihre Bestücklage gedreht werden.
Jedes Segment verfügt über einen eigenen Vakuumerzeuger. Die Umschaltzeiten zwischen
Vakuum und Blasluft lassen sich damit erheblich verkürzen. Zudem kann im Haltekreis für jede
einzelne Pipette eine Vakuumprüfung durchgeführt werden.
Der Z-Antrieb der Segmente ist mit einem Linearmotor mit linearem Wegmesssystem realisiert
und damit überaus präzise. In der Abhol-/Bestückposition verfährt der Z-Antrieb die Segmente in
vertikaler Richtung nach unten bzw. nach oben.
Wie bei allen SIPLACE Collect&Place-Köpfen ist die digitale BE-Kamera am Bestückkopf inte-
griert. Der Wegfall zusätzlicher Verfahrwege für die optische Zentrierung der Bauelemente trägt
zu einer hohen Verarbeitungsgeschwindigkeit bei.
Der BE-Sensor an der Bestückkopfunterseite misst die Bauelemente an der Abhol-/Bestückposi-
tion. Für jede Bewegung der Z-Achse lassen sich Messungen an der Pipettenspitze durchführen
und Aussagen dazu machen, ob ein Bauelement an der Pipette haftet und wie hoch das Bauele-
ment ist.
3.5.2.2 Montagepositionen des SIPLACE MultiStar
Der CPP-Kopf kann in zwei unterschiedlich Positionen an die Kopfhalterung montiert werden:
– MultiStar in der oberen Montageposition
In dieser Position können alle Bauelemente bis zur Größe von 50 mm x 40 mm und einer Hö-
he bis 11,5 mm verarbeitet werden. 3
– MultiStar in der unteren Montageposition
In dieser Position bestückt der CPP-Kopf die Bauelemente bis zu einer Größe von
27 mm x 27 mm und einer BE-Höhe von 6 mm nach dem Collect&Place-Verfahren. 3