KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第187页
4 - 83 (2) MT C/MT S/DTS ① MTC 速度 MTC の動作速度をコンボボックスで指定します。 ・ 軽い部品がはねるのを防ぎます。 ② ピックアップ MTC の吸着パットの種類をコンボボックスで 指定します。 ピックアップ部の吸着パッドを部品によって 選択し使用することができます。 ( 表 4-7-6 吸着パッドのデフォルト値参照 ) 「自動」が選択された場合、生産時に 「自動」 が選択された場合、生産時に同一…
4 - 82
⑤
搭載Z上昇加速度
搭載Z上昇加速度搭載Z上昇加速度
搭載Z上昇加速度
搭載位置におけるZ軸アップの加速度(部品位置安定用)をコンボボックスで指定しま
す。
選択内容は、XYに同じです。
⑥
θ速度
θ速度θ速度
θ速度
θ回転速度をコンボボックスで指定します。
·
計測時
レーザ認識時のθ軸の加速度を設定します。
·
計測外
レーザ認識外のθ軸の加速度を設定します。
選択内容は、XYに同じです。
⑦
搭載オフセット
搭載オフセット搭載オフセット
搭載オフセット
左右非対象形部品に対する搭載時のオフセットを入力します。
⑧
レーザ高さ
レーザ高さレーザ高さ
レーザ高さ
部品上面からレーザ面までのオフセットを入力します。
LA/LAHD
ヘッドまたは
MNLA/FMLA
ヘッド使用時に有効になります。
⑨
レーザ
レーザレーザ
レーザ認識アルゴリズム
認識アルゴリズム認識アルゴリズム
認識アルゴリズム
レーザ認識用のアルゴリズムをコンボボックスより指定します。
アルゴリズム0:
吸着姿勢から搭載角度分回転させて搭載します。
(レーザ認識できないが搭載したい部品対応)
アルゴリズム1:
陰幅が最小となる辺(第1最小陰
A
)を見つけ、検出した最小幅
の辺から
+90°
の位置まで回転させ、最小幅(第2最小陰
B
)を検
出し、位置ずれ、角度ずれの補正を行い、搭載します。
(チップ部品対応)
アルゴリズム2:
陰幅が最小となる辺(第1最小陰
A
)を見つけ、検出した最小幅
の辺から
+
方向にレーザアライメントしながら回転させ、最小幅
(第2最小陰
B
)を検出し、位置ずれ、角度ずれの補正を行い、
搭載します。
(
SOP
等リードのある部品対応)
アルゴリズム3:
吸着姿勢のまま陰を検出(第1最小陰
A
)し、検出した辺から
+90°
の位置まで回転させ、最小幅(第2最小陰
B
)を検出し、位
置ずれの補正を行い、搭載します。
(円筒部品対応)
⑩
プリローテイト角度
プリローテイト角度プリローテイト角度
プリローテイト角度
吸着したレーザ認識部品を、センタリング前にどのくらい回転させるか(プリローテイ
ト角度)を設定します。プリローテイトする角度をエディットフィールドに入力します。
外形寸法初期入力時にデフォルト値が設定されます。外形寸法を変更した時には、デフ
ォルト値は設定されません。
4 - 83
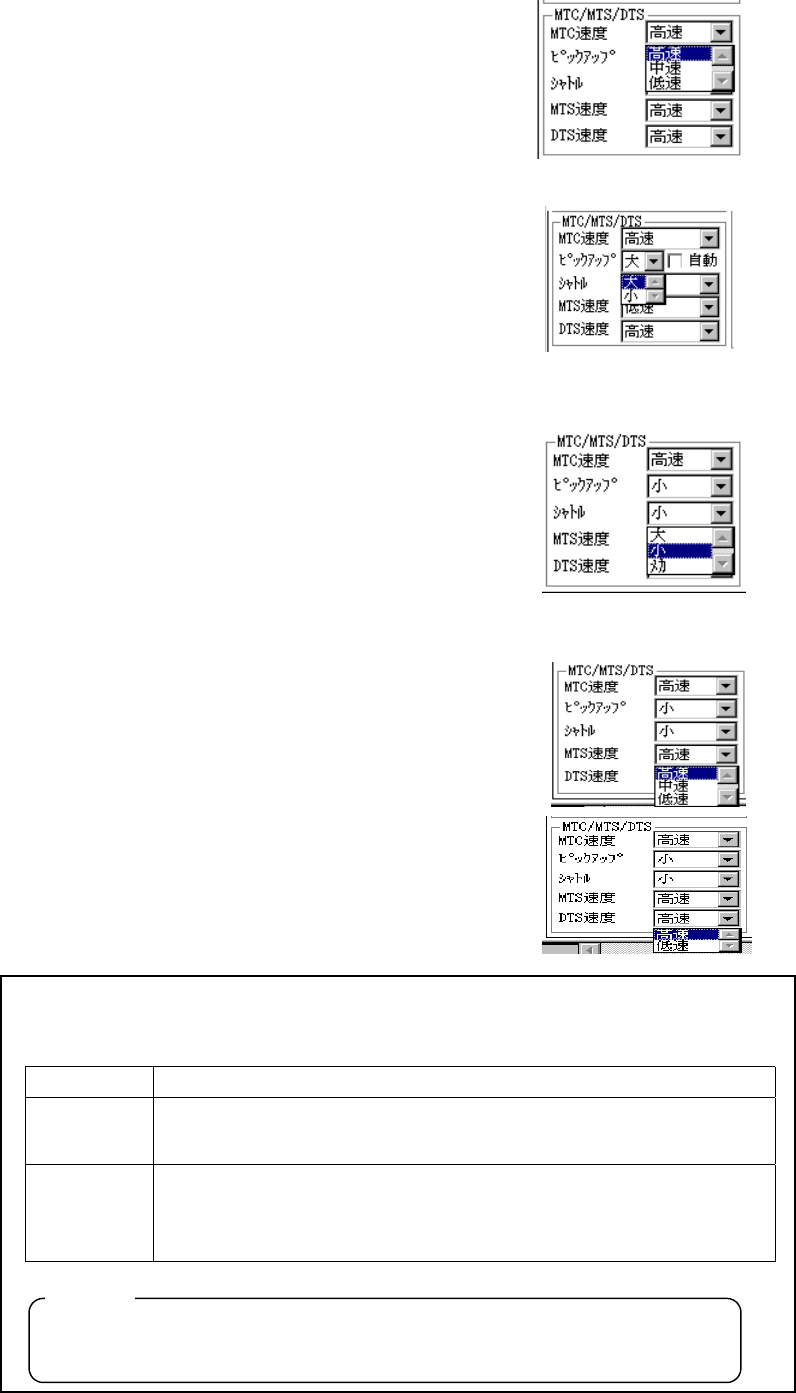
(2) MTC/MTS/DTS
①
MTC
速度
MTC
の動作速度をコンボボックスで指定します。
・
軽い部品がはねるのを防ぎます。
② ピックアップ
MTC
の吸着パットの種類をコンボボックスで
指定します。
ピックアップ部の吸着パッドを部品によって
選択し使用することができます。
(
表
4-7-6
吸着パッドのデフォルト値参照
)
「自動」が選択された場合、生産時に 「自動」
が選択された場合、生産時に同一部品に
対して両パッドを選択して吸着します。
但し、部品サイズによっては吸着出来ない場合が
あります。パッドを
選択して吸着します。
③ シャトル
MTC
のシャトルパットの種類をコンボボックスで
指定します。
④
MTS
MTS
の動作速度をコンボボックスで指定します。
・
トレイを引き出す速度を指定します。
⑤ D
TS
速度
D
TS
の動作速度をコンボボックスで指定します。
・
トレイを引き出す速度を指定します。
●下記に吸着パッドのデフォルト値を示します。
表
4-7-6
吸着パッドのデフォルト値
画面表記
デフォルト値
ピックアッ
プ
・部品寸法の縦横の短辺が
16mm
未満の場合
:
小
16mm
以上の場合
:
大
シャトル
・部品種別がBGAの場合
:メカ
・
部品種別がBGA以外の場合、部品寸法の縦横の短辺が
16mm
未満の場合
:小
16mm
以上の場合
:大
リード長や部品形状により、シャトルの変更が必要になる場合があります。
リード長や部品形状により、シャトルの変更が必要になる場合があります。リード長や部品形状により、シャトルの変更が必要になる場合があります。
リード長や部品形状により、シャトルの変更が必要になる場合があります。
・
シャトル部の吸着パッドを部品によって選択し
使用することができます。
(表
4-7-6
吸着パッドのデフォルト値参照)
・
メカを選択した場合、MTCへの部品戻しがで
きません。付加情報の部品破棄の項でトレイ戻
し以外を選択して下さい。
注意:
注意:注意:
注意:
4 - 84
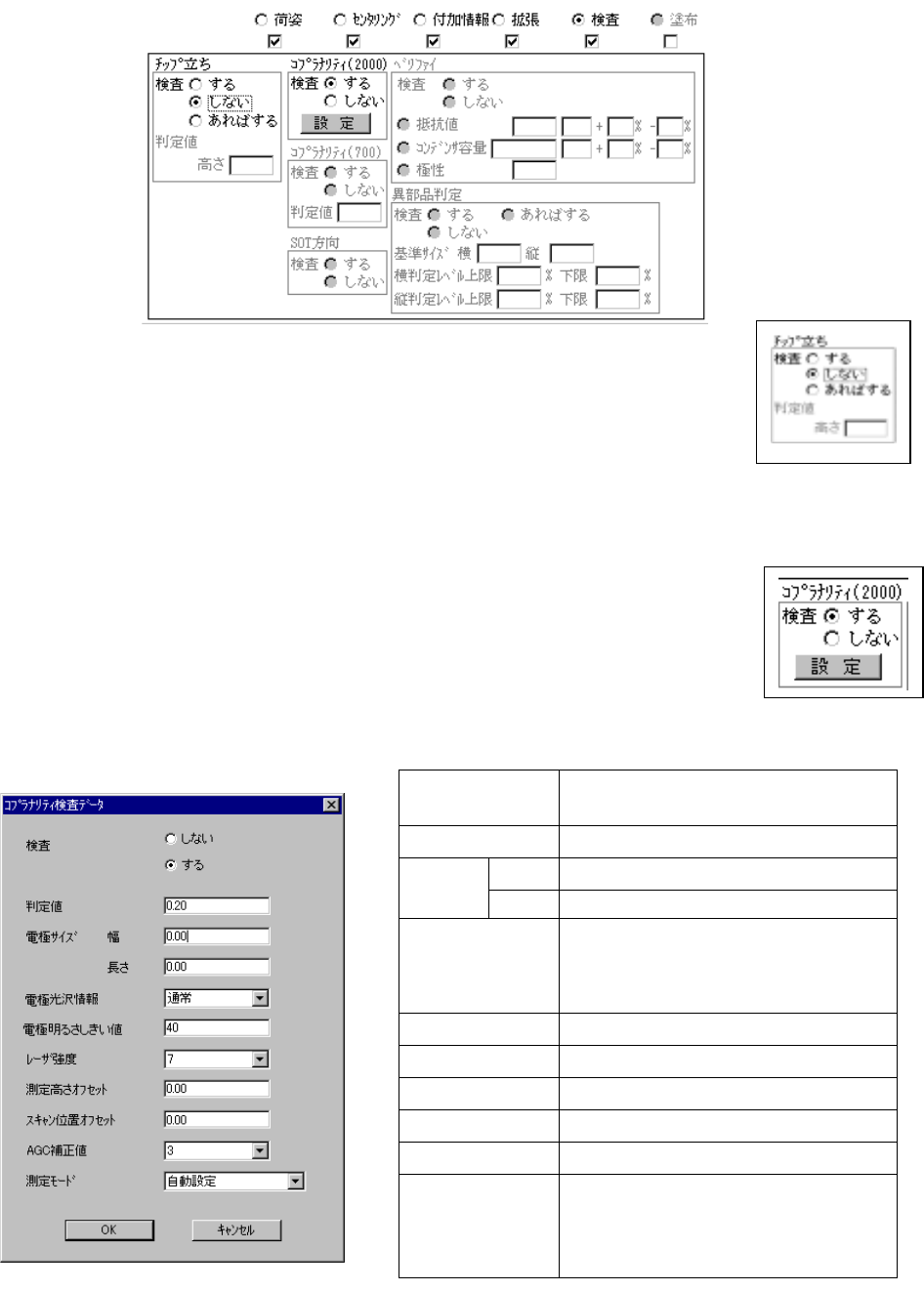
検査 コプラナリティ検査をするかしないかを選択しま
す。
判定値 判定値を設定します。
幅 電極サイズの幅を設定します。 電極サイズ
長さ
電極サイズの長さを設定します。
電極光沢情報
電極光沢情報を設定します。
通常
光沢あり
光沢なし
電極明るさしきい値
電極明るさのしきい値を設定します。
レーザ強度
レーザの強度を設定します。
測定高さオフセット
測定高さのオフセットを設定します。
スキャン位置オフセット
スキャン位置のオフセットを設定します。
AGC
補正値
AGC
の補正値を設定します。
測定モード
測定のモードを設定します。
自動設定
標準測定モード
・高精度測定モード
4-7-7. タックコントロール部(検査ページ)
タックコントロール部(検査ページ)タックコントロール部(検査ページ)
タックコントロール部(検査ページ)
①
①①
①
チップ立ち
チップ立ちチップ立ち
チップ立ち
チップ立ち検出オプションを“使用するか
否か”
の設定をラジオボタンで指定します。
「する」、「あればする」を指定した場合は、判定値として高さを入力してください。「あればす
る」を選択した場合、チップ立ち検出装置があれば検出が行われます。
②
②②
②
コプラナリティ
コプラナリティコプラナリティ
コプラナリティ(
((
(
KE-2020,2040
のみ適用)
のみ適用)のみ適用)
のみ適用)
IC部品のリード浮きの検査を“行うか
否か”をラジオボタンで設定します。
「する」を指定した場合は、判定値を入力してください。
◇
<設定>ボタンをクリックすると、検査データ設定ダイアログが表示されます。
<
OK
>ボタンで設定、<キャンセル>ボタンで取り消します。
BGA,FBGA
では、電極サイズの幅、長さ、電極光沢情報、スキャン位置オフセットの設定
は出来ません。