KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第287页
4 - 183 4-12-4. 確認 確認 確認 確認 4-12-4-1. マーク系 マーク系 マーク系 マーク系 −BOC −BOC −BOC −BOC BOCマークを認識し認識座標の実測値を本体に格納しておきます。この実測値 は搭載データティ ーチング時の座標補正に反映されます。 メニュー選択後,安全カバーが開いていると軸動作が伴う機能であるため以下の ダイアログが表示 されます。 安全を確認して < スタート > …
4 - 182
4-12-3-8.
コプラナリティパラメータ取得中ダイアログ
コプラナリティパラメータ取得中ダイアログコプラナリティパラメータ取得中ダイアログ
コプラナリティパラメータ取得中ダイアログ
コプラナリティ検査ダイアログで、パラメータ取得の項目の取得ボタンを押すと、パラメータ取得が実行され、実
行中は以下のダイアログが表示されます。
図
図図
図
4-12-3-5
.
..
.
コプラナリティパラメータ取得中ダイアログ
コプラナリティパラメータ取得中ダイアログコプラナリティパラメータ取得中ダイアログ
コプラナリティパラメータ取得中ダイアログ
4-12-3-9.パラメータ取得継続確認ダイアログ
パラメータ取得継続確認ダイアログパラメータ取得継続確認ダイアログ
パラメータ取得継続確認ダイアログ
現状のコプラ検査パラメータの測定結果に不安定な要素(バラツキ等)がある場合は、測定エラーが発生しなくても、
このダイアログを表示します。
はいを押すと、継続パラメータ取得を実施します。この場合、最大、設定回数×20回程度の測定を実施します。
いいえを押すと、現状のコプラ検査パラメータを採用します。
図
図図
図
パラメータ取得継続確認ダイアログ
パラメータ取得継続確認ダイアログパラメータ取得継続確認ダイアログ
パラメータ取得継続確認ダイアログ
4-12-3-10.
パラメ
パラメパラメ
パラメータ取得結果ダイアログ
ータ取得結果ダイアログータ取得結果ダイアログ
ータ取得結果ダイアログ
コプラパラメータの最適値を取得した場合、取得した電極明るさしきい値
とスキャン位置オフセットが表示されます。
括弧内に取得前のパラメータ表示されます。はいを押すと、取得したパラ
メータに更新されます。いいえを押すと取得前のパラメータに設定されま
す。
図
図図
図4
44
4-
--
-12
1212
12-
--
-3
33
3-
--
-7
77
7パラメータ取得結果ダイアログ
パラメータ取得結果ダイアログパラメータ取得結果ダイアログ
パラメータ取得結果ダイアログ
4 - 183
4-12-4.
確認
確認確認
確認
4-12-4-1. マーク系
マーク系マーク系
マーク系
−BOC
−BOC−BOC
−BOC
BOCマークを認識し認識座標の実測値を本体に格納しておきます。この実測値は搭載データティ
ーチング時の座標補正に反映されます。
メニュー選択後,安全カバーが開いていると軸動作が伴う機能であるため以下のダイアログが表示
されます。
安全を確認して
<
スタート
>
ボタンを押してください。
図
図図
図
4-12-4-1-1
安全確認ダイアログ
安全確認ダイアログ安全確認ダイアログ
安全確認ダイアログ
<
スタート
>
ボタン押下後,実行中は以下のダイアログが表示されます。
BOCアライメント実行中で,なんらかの理由で動作を取りやめたいときは,
<
ストップ
>
ボタンで
停止できます。
図
図図
図
4-12-4-1-2
BOCマークアライメント中ダイアログ
BOCマークアライメント中ダイアログBOCマークアライメント中ダイアログ
BOCマークアライメント中ダイアログ
4 - 184
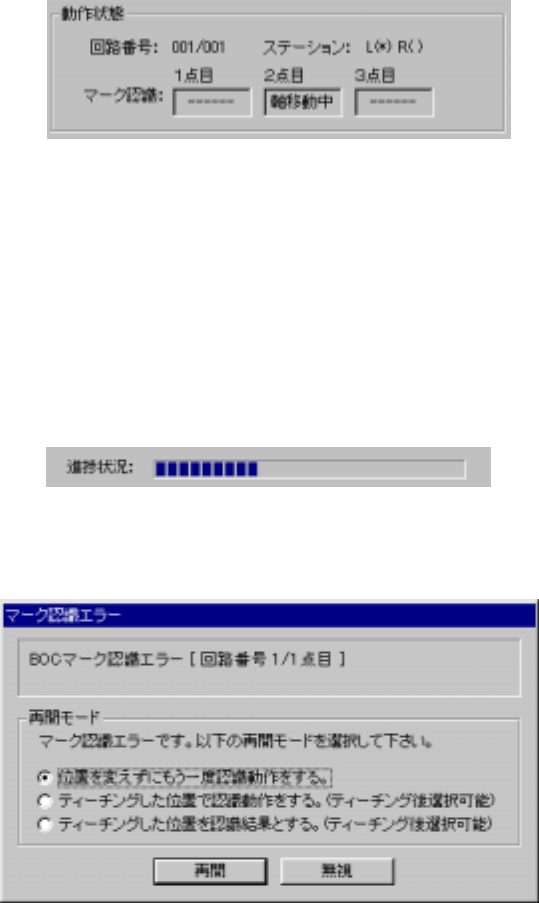
(1)
動作状態
動作状態動作状態
動作状態
①
回路番号
認識実行中の回路番号が表示されます。「現在の回路番号/回路総数」を意味します。
(通常は基準回路のBOCのみ認識します)
②
ステーション(
KE2030
のみ)
認識実行中のステーションが表示されます。
(2)
進捗状況
進捗状況進捗状況
進捗状況
進捗の割合がプログレスバーで表示されます。
実行時にBOCマーク認識に失敗した場合は以下のダイアログが表示されます。
図
図図
図
4-12-4-1-3
BOCマーク認識エラー
BOCマーク認識エラーBOCマーク認識エラー
BOCマーク認識エラー
認識を再開する場合は以下の再開モードを選択します。
①
位置を変えずにもう一度認識動作をする。
現在の
OCC
カメラのある位置を変えずに、もう一度マーク認識を実行します。
②
ティーチングした位置で認識動作をする。
HOD
の
CAMERA
ボタンで座標ティーチングを行った位置にて、もう一度マーク認識
を実行します。
この項目はティーチング確定後選択が可能となります。
③
ティーチングした位置を認識結果とする。
HOD
の
CAMERA
ボタンで座標ティーチングを行った位置を
BOC
認識時のマーク中
心の実測値として確定します。この項目はティーチング確定後選択が可能となります。
◇
上記選択後、認識を再開する場合は「再開」ボタンを押してください。
「無視」ボタンを押した場合は、その後は回路毎/基板毎単位でBOC認識は実行されま
せん。