KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第305页
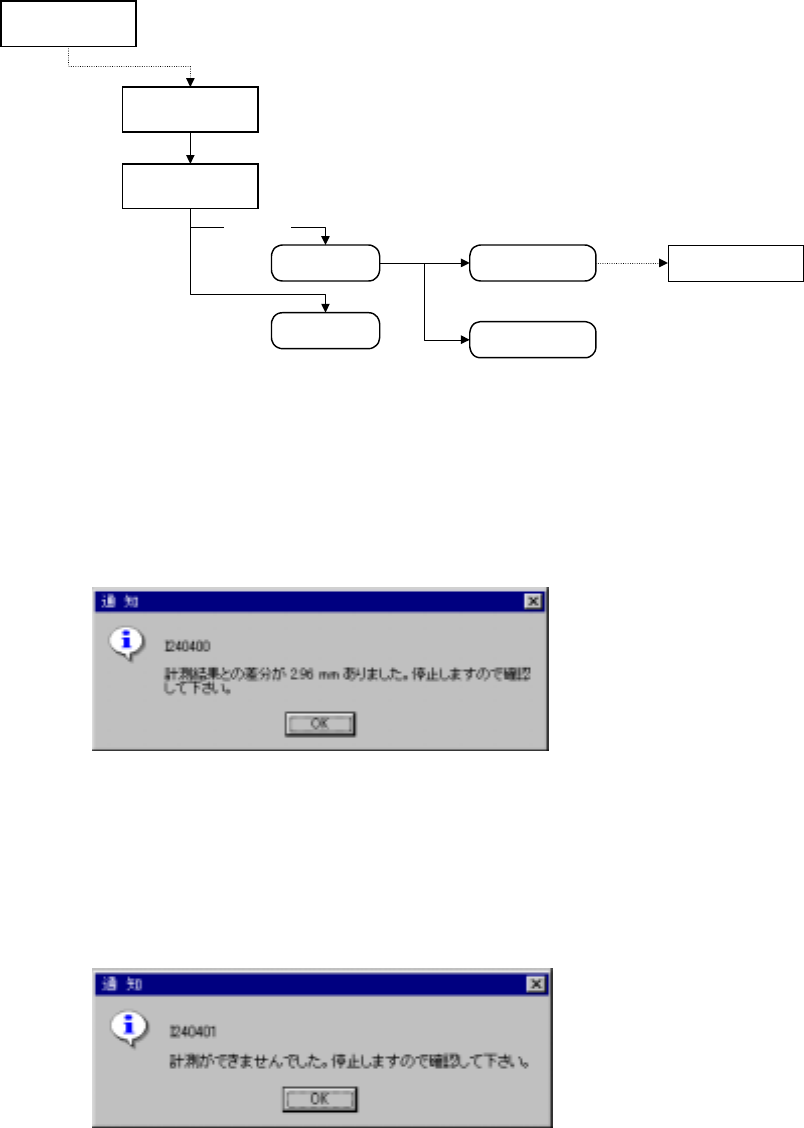
4 - 201 吸着追尾でのティーチング操作の流れ 吸着座標 XYZエディットボックス に入力フォーカス HOD デバイスキー押下 ENTER CANCEL ティーチング操作 [設定」ボタンまたは ENTERを押す 吸着データ変更 [取消]ボタンまたは CANCELを押す 座標確定後 (7) 吸着高さ追尾時の各点での動作 吸着高さ追尾時の各点での動作 吸着高さ追尾時の各点での動作 吸着高さ追尾時の各点での…
4 - 200
② 吸着高さ追尾
実行中は各吸着点毎に以下の情報がモニター出力されます。
部品サイズによるHMS計測位置は以下のとおりです。
部品サイズ
部品の高さ計測位置
全部品
部品中心
(6) 追尾中の座標ティーチング
追尾中の座標ティーチング追尾中の座標ティーチング
追尾中の座標ティーチング
追尾した座標が実際と異なる場合,HOD使った操作で吸着座標をティーチングすることがで
きます。
手順 1) カーソルをXまたはYまたはZ座標に移動する。
手順 2) HODデバイスボタンを押し,座標ティーチングを行い ENTER で確定させる。
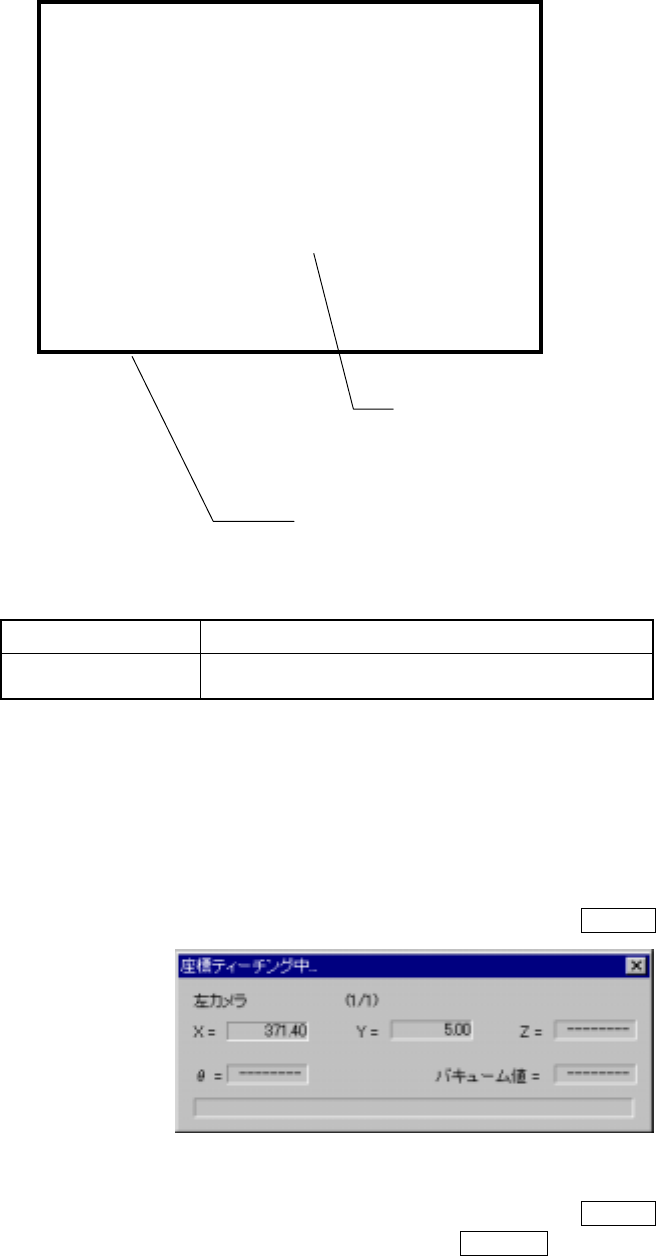
ティーチング中ダイアログ
ティーチング中ダイアログティーチング中ダイアログ
ティーチング中ダイアログ
手順 3) 確定した座標値を有効にする場合は<設定>または再度 ENTER を押す。
座標を元に戻したい場合は<取消>または CANCEL を押す。
------- PICK Z TRACE -------
Station:L または
Device:荷姿
Fdr No :フィーダー番号
Compo:部品名
Angle :供給角度
Z : < データ値 >
Hms : < 検出値 >
Pos X:座標 Y:座標
原点復帰位置からの座標を示しています。
部品の中心で停止後,吸着データの高さ値と
HMSで検出された高さ値を表示します。
HMSで検出不可の場合は< ***** >となります。
4 - 201
吸着追尾でのティーチング操作の流れ
吸着座標
XYZエディットボックス
に入力フォーカス
HOD
デバイスキー押下
ENTER
CANCEL
ティーチング操作
[設定」ボタンまたは
ENTERを押す
吸着データ変更
[取消]ボタンまたは
CANCELを押す
座標確定後
(7) 吸着高さ追尾時の各点での動作
吸着高さ追尾時の各点での動作吸着高さ追尾時の各点での動作
吸着高さ追尾時の各点での動作
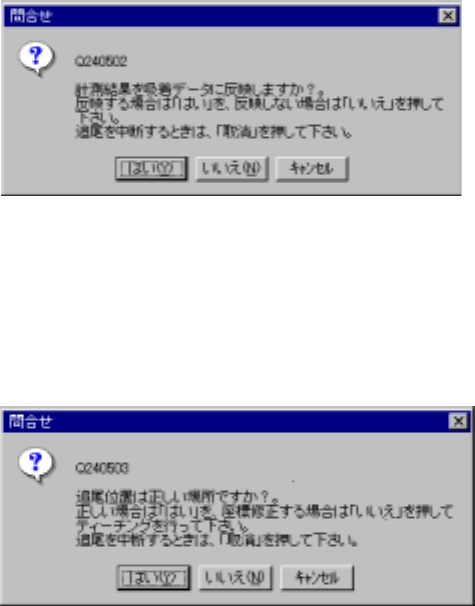
吸着高さ追尾の条件設定で「計測値との差分があれば停止する」を設定した場合、計測値との
差分があれば以下の様なダイアログが表示されます。自動送りの場合は停止しますので吸着デ
ータの高さ値を確認して下さい。
吸着高さ追尾の条件設定で「計測できなければ停止する」を設定した場合、HMSで計測でき
なければ以下の様なダイアログが表示されます。自動送りの場合は停止しますので吸着データ
の吸着位置を確認して下さい。
4 - 202
吸着高さ追尾の条件設定で「計測値の取り込み動作を行う」を設定した場合、HMSでの計
測値を吸着データのZ座標に取り込むかどうかの問い合わせダイアログが表示されます。
取り込む場合は「はい」を押して下さい。
吸着高さ追尾の条件設定で「カメラで位置確認をする」を設定した場合、VCSモニターに
吸着位置を映し出しますので、以下のダイアログが表示されたら目視で確認して下さい。
位置が正しければ「はい」を、吸着位置をティーチングし直したい場合は「いいえ」を押し
て(6)項のティーチング操作を行って下さい。