KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第341页
6 - 6 5) センタリング ピン⑭ 27 は使用しないので, ストッパレバー B を押し下げ,ダンパ プレ ート C に引掛けるように 回転させ,センタ リングピン⑭ 27 が下がった状態にロッ クし ます。 図 図 図 図 6-1-3-6 ① 上記の (4) 外形基準の 調整の 1) より 5) までの 調整を電源オン ,エアバルブ オンの状態で マニュアル制御の搬送系の個別制御と自動制御を使用しての調整も可能です。 ② スト…
6 - 5
(3) バックアップピンのレイアウト
バックアップピンのレイアウトバックアップピンのレイアウト
バックアップピンのレイアウト
1) 生産基板に合わせてバックアップテーブル⑮
28
上にバックアップピン⑰を配置して下
さい。(標準で 8 本添付 M) 12 本(L) 16 本(E)
2) 基板裏面に部品がある場合は,これを避けて下さい。
QFP 等の搭載の精度が求められる部品の下には,バックアップピンを配置されると精度
の向上が計れます。
危険
不意の起動による事故を防ぐため,電源を切ってから行って下さい。
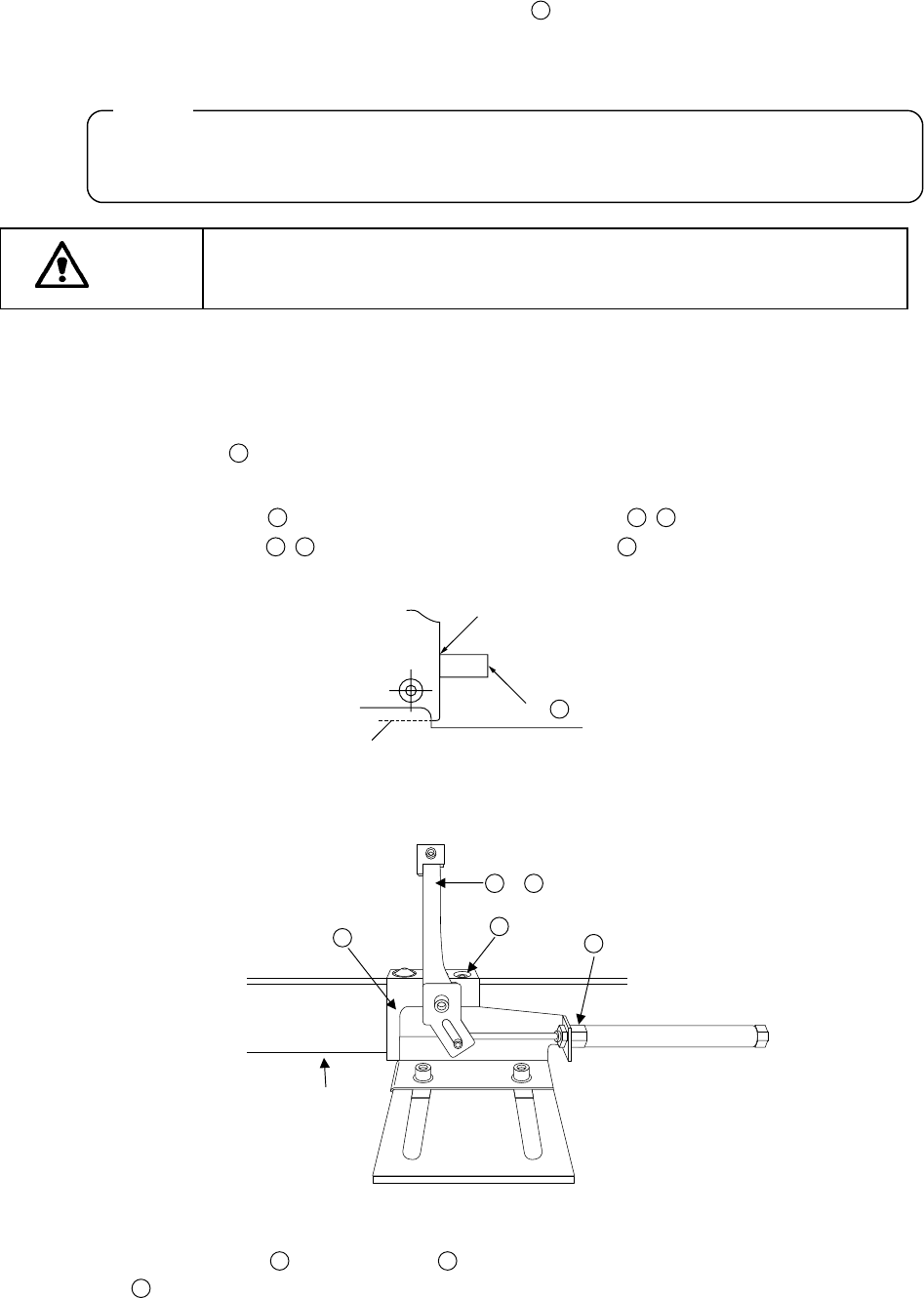
(4) 外形基準の調整
外形基準の調整外形基準の調整
外形基準の調整(ピン基準の場合,この項は不要です)(図 6-1-3-4,図 6-1-3-5,図 6-1-3-6)
1) 本体の電源をオフし,エアバルブもオフにします。
2) ストッパ⑪
24
を手で動かし,基板の中央付近,切欠けを避けて,生産基板をストッパに
突き当てます。
3) ガイドブロック
36
をX方向にスライドさせ,プッシャ A
44 45
を手で動かし,基板の端
面とプッシャ A
44 45
を合わせます。この時,ストッパ⑪
24
と基板を密着させて下さい。
図
図図
図 6-1-3-4
図
図図
図 6-1-3-5
4) ガイドブロック
36
をサポートバー
38
に矢印の方向に押しつけながら,M4 六角ボルト
37
を締め,ガイドブロックを固定して下さい。
基板
密着
注意:
注意:注意:
注意:
⑪
24
44
,
45
37
38
36
押す方向
6 - 6
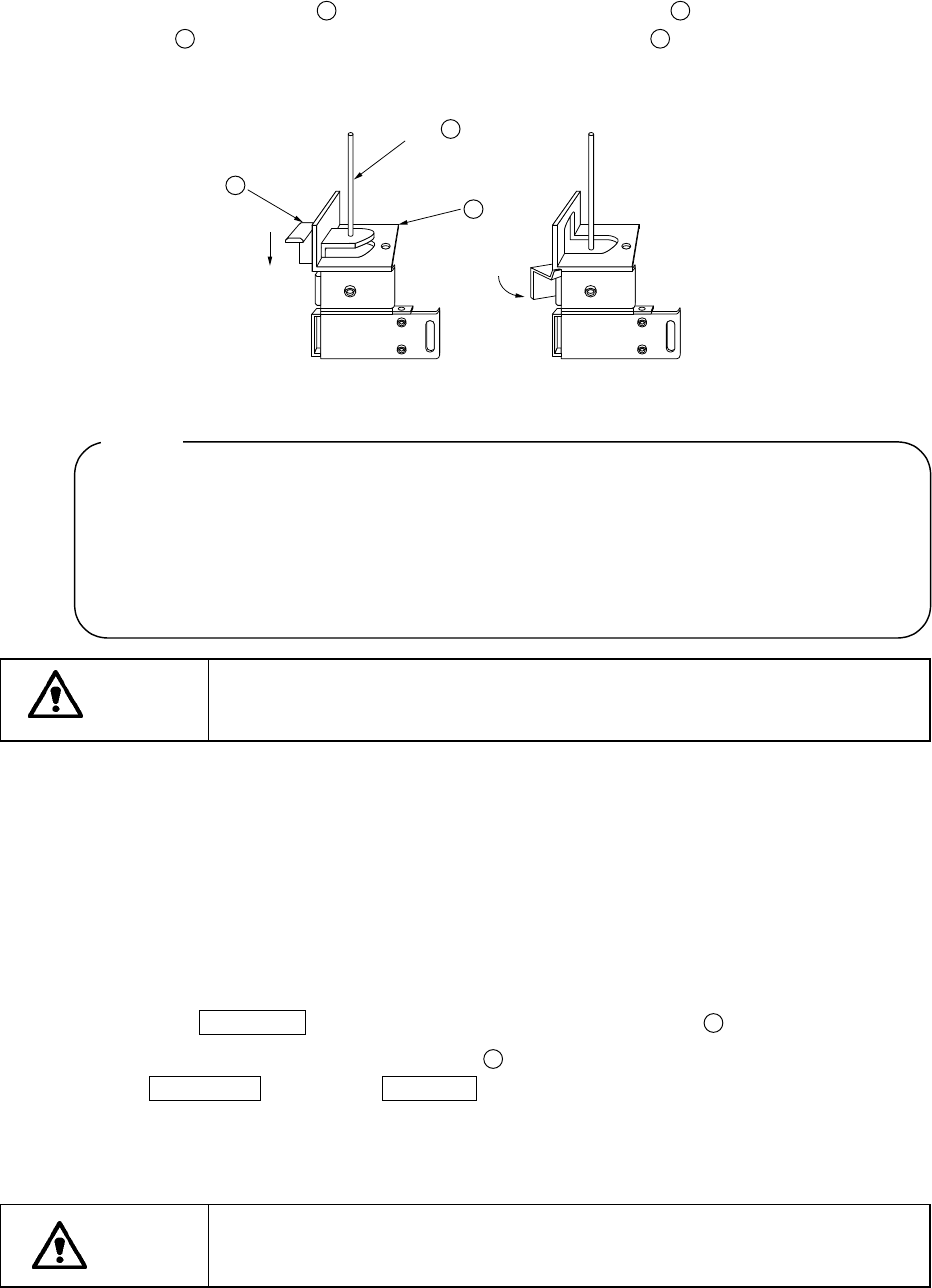
5) センタリングピン⑭
27
は使用しないので,ストッパレバー
B
を押し下げ,ダンパプレ
ート
C
に引掛けるように回転させ,センタリングピン⑭
27
が下がった状態にロックし
ます。
図
図図
図 6-1-3-6
① 上記の(4) 外形基準の調整の 1)より 5)までの調整を電源オン,エアバルブオンの状態で
マニュアル制御の搬送系の個別制御と自動制御を使用しての調整も可能です。
② ストッパを移動した場合は,必ずマシンセットアップの外形基準の位置を再入力して下
さい。入力しないと基準位置がズレます。
③ 同一仕様の基板の場合,調整の必要はありません。
危険
不意の起動による事故を防ぐため,電源を切ってから行って下さい。
(5) センタリングピンの位置入力
センタリングピンの位置入力センタリングピンの位置入力
センタリングピンの位置入力(外形基準の場合,この項は不要です)(図 6-1-3-6)
1) 本体の電源をオンし,エアバルブもオンします。
イニシャライズ(原点出し)を行って下さい。
2) [マシンセットアップのメカセットアップ]をポップアップで起動し,BU プレート⑫を上
昇させます。
3) 次に[設定グループの基準ピン]での位置を選択します。
4) HOD の CAMERA キーを押すと,OCC がセンタリングピン⑭
27
上に移動します。
5 CRT を見ながら,センタリングピン⑭
27
の中心をティーチングして下さい。
( WINDOW キーまたは 2POINT キーを使用します。)
6) 続いて従動ピンについてもティーチングを行って下さい。
(マシンセットアップ 7-2-2-3 参照)
危険
人身事故への損害を防ぐため,HOD 操作中は装置内部に手を入れたり,顔や頭
を近づけないで下さい。
B
⑭
27
C
注意:
注意:注意:
注意:
6 - 7
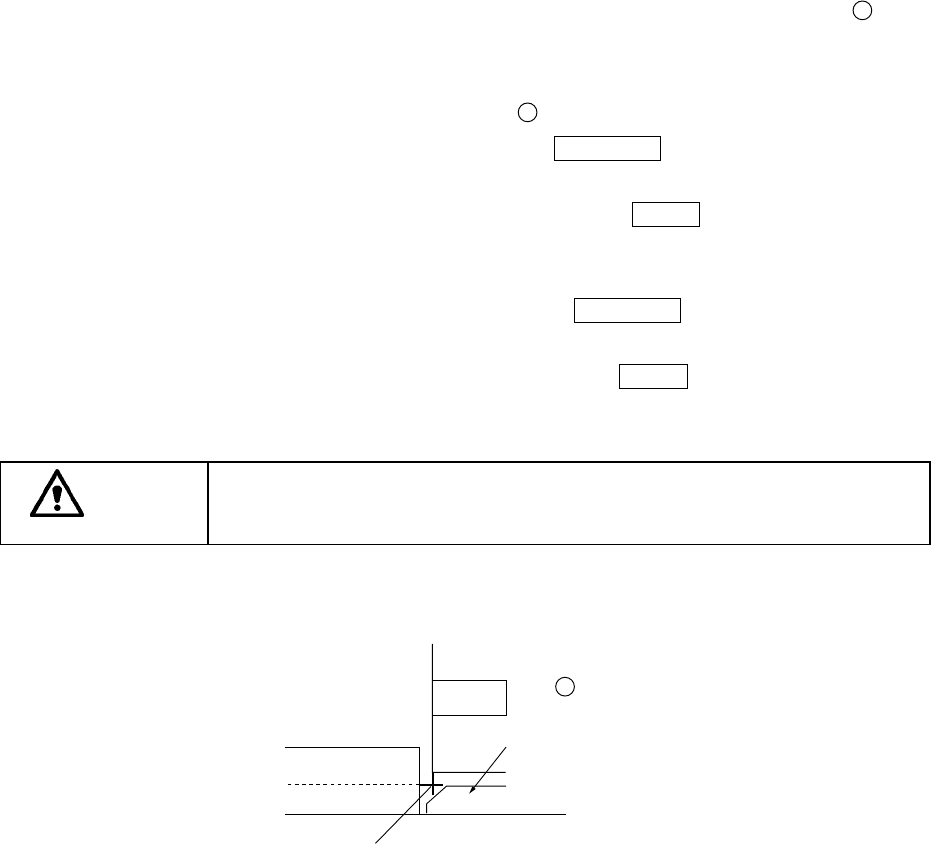
(6) 外形基準の位置入力(
外形基準の位置入力(外形基準の位置入力(
外形基準の位置入力(ピン基準の場合,この項は不要です)(図 6-1-3-7)
1) 本体の電源をオンし,エアバルブもオンにします。
2) [マシンセットアップのメカセットアップ]をポップアップで起動し,ストッパ⑪
24
をオ
ンします。
3) 次に「設定グループの外形基準」で位置を選択します。
4) 基板を搬送レールにセットし,ストッパ⑪
24
に軽く突き当てます。
5) カーソルをXのウィンドウに合わせて HOD の CAMERA キーを押すと,OCC が現在
の外形基準位置に移動します。
6) CRT を見ながら,十字カーソルを基板の端面に合わせ,ENTER キーを押すことにより,
X座標の数値のみが入力されます。
なお,このときに,基板と PWB ガイドが密着するようにして下さい。
7) 次にカーソルをYのウィンドウに合わせ HOD の CAMERA キーを押すと,OCC を外
形基準位置に戻ります。
8) CRT を見ながら,十字カーソルを基板の端面に合わせ,ENTER キーを押すことにより,
Y座標の数値のみが入力されます。
危険
人身事故への損害を防ぐため,HOD 操作中は装置内部に手を入れたり,顔や頭
を近づけないで下さい。
図
図図
図 6-1-3-7
基板
⑪
24
ストッパ
外形基準位置
PWB
ガイド