KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第343页
6 - 8 6-1-3-3. その他の調整 その他の調整 その他の調整 その他の調整 (1) 異形基板 異形基板 異形基板 異形基板 切欠きのある基板等では基板検出 センサが誤検出する可能性 がある為,切欠きの大きさ に応 じて,基板搬送センサ遅延を入力して下さい。 また,異形基板等ではストッパ及び基板検出センサの位置を変更することが出来ます。 a. 基板搬送センサ遅延時間 1) マシンセットアップの設定グループで,基板搬送の項を選…
6 - 7
(6) 外形基準の位置入力(
外形基準の位置入力(外形基準の位置入力(
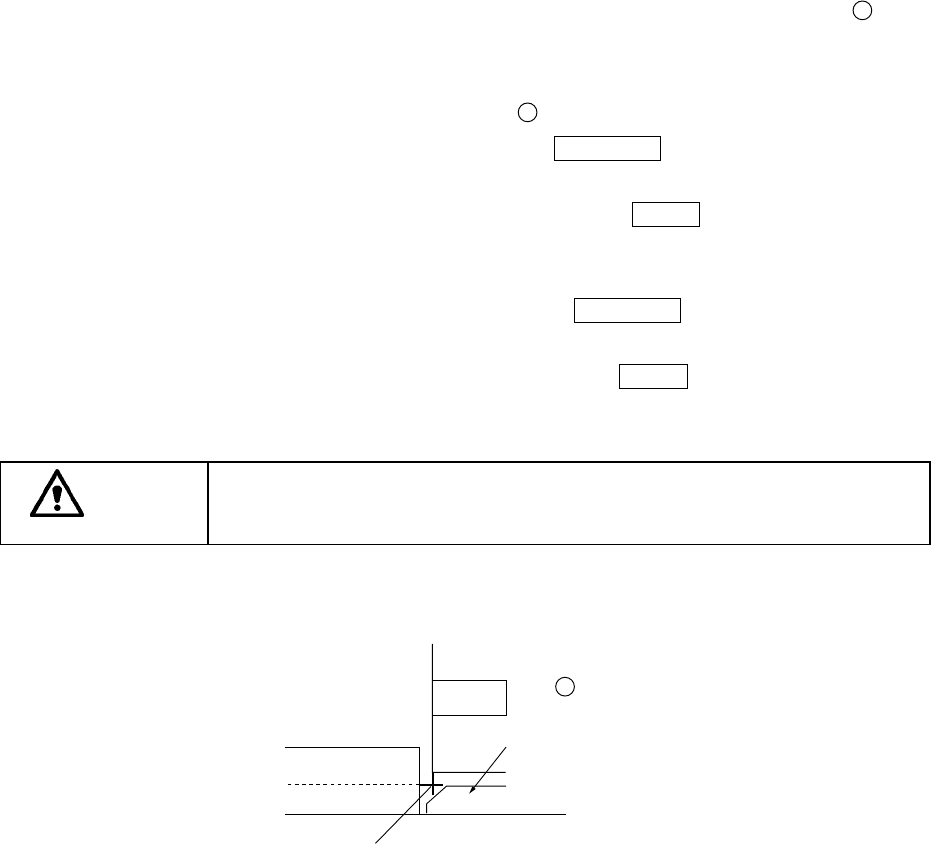
外形基準の位置入力(ピン基準の場合,この項は不要です)(図 6-1-3-7)
1) 本体の電源をオンし,エアバルブもオンにします。
2) [マシンセットアップのメカセットアップ]をポップアップで起動し,ストッパ⑪
24
をオ
ンします。
3) 次に「設定グループの外形基準」で位置を選択します。
4) 基板を搬送レールにセットし,ストッパ⑪
24
に軽く突き当てます。
5) カーソルをXのウィンドウに合わせて HOD の CAMERA キーを押すと,OCC が現在
の外形基準位置に移動します。
6) CRT を見ながら,十字カーソルを基板の端面に合わせ,ENTER キーを押すことにより,
X座標の数値のみが入力されます。
なお,このときに,基板と PWB ガイドが密着するようにして下さい。
7) 次にカーソルをYのウィンドウに合わせ HOD の CAMERA キーを押すと,OCC を外
形基準位置に戻ります。
8) CRT を見ながら,十字カーソルを基板の端面に合わせ,ENTER キーを押すことにより,
Y座標の数値のみが入力されます。
危険
人身事故への損害を防ぐため,HOD 操作中は装置内部に手を入れたり,顔や頭
を近づけないで下さい。
図
図図
図 6-1-3-7
基板
⑪
24
ストッパ
外形基準位置
PWB
ガイド
6 - 8
6-1-3-3.
その他の調整
その他の調整その他の調整
その他の調整
(1) 異形基板
異形基板異形基板
異形基板
切欠きのある基板等では基板検出センサが誤検出する可能性がある為,切欠きの大きさに応
じて,基板搬送センサ遅延を入力して下さい。
また,異形基板等ではストッパ及び基板検出センサの位置を変更することが出来ます。
a. 基板搬送センサ遅延時間
1) マシンセットアップの設定グループで,基板搬送の項を選択します。
(第7章マシンセットアップ参照)
2) 基板の切欠きの長さに応じて,遅延をキーボードから入力して下さい。
値としては,30mm の切欠きに対して 60ms を目安にします。
図
図図
図 6-1-3-8
3) 各基板検出センサの位置が,切欠き部分に掛からなければ,遅延を入力する必要はあり
ません。
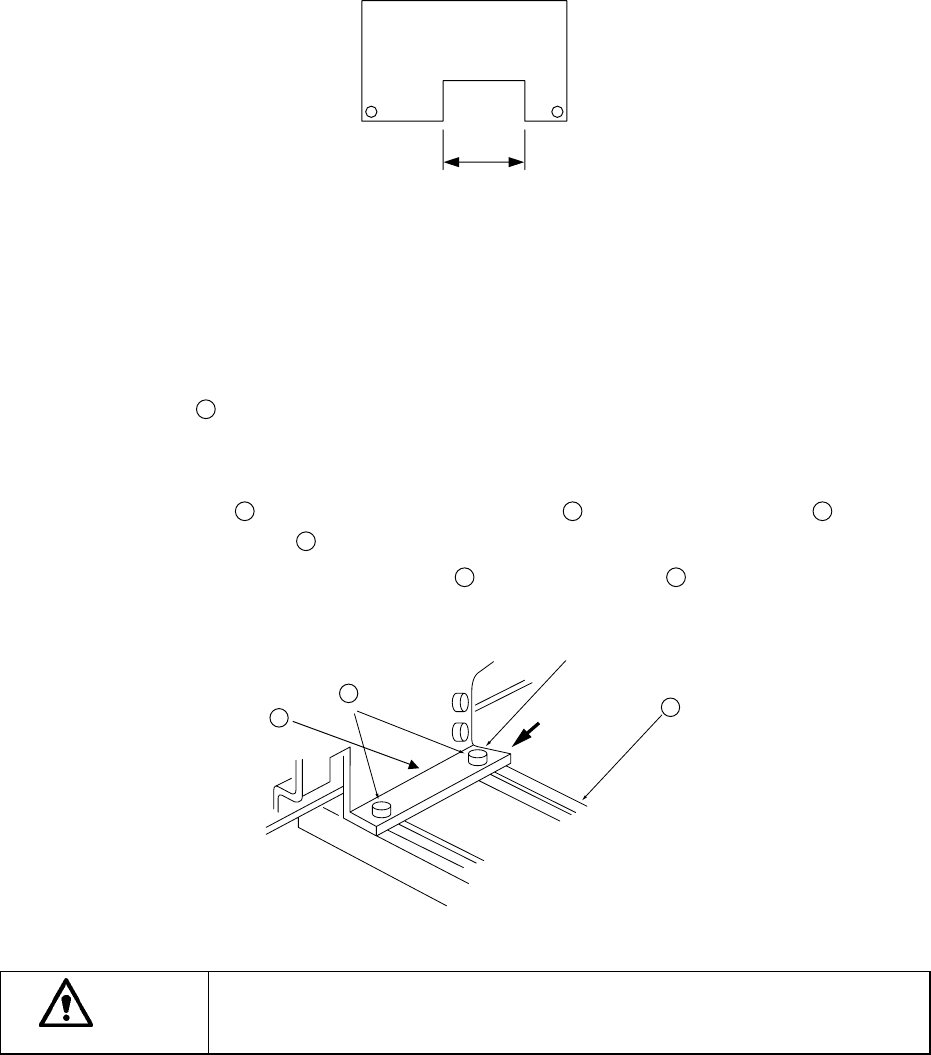
b. ストッパ(図 6-1-3-1,図 6-1-3-9)
ストッパ⑪
24
はY方向に移動させることが出来ます。
基板前端部に切欠きがある場合などは,移動して下さい。
1) 本体の電源をオフし,エアバルブもオフにします。
2) ストッパ組
39
を固定している M4 六角穴ボルト
40
を緩め,レールサポート
41
の長穴に
沿ってストッパ組
39
を移動させます。
3) 適切な位置で再び M4 六角穴ボルト
40
を締め,ストッパ組
39
を固定して下さい。
この時,矢印方向に軽く突き当てながら固定して下さい。
図
図図
図 6-1-3-9
危険
不意の起動による事故を防ぐため,電源を切ってから行って下さい。
A : 切欠き長さ
A
突き当て
41
40
39
6 - 9
4) STOPセンサ⑥⑲及び C-OUTセンサ⑦⑳はストッパ組に取付けられている為ストッパの
位置と共に移動します。
5) ストッパ組を移動した時は,[6-1-3-2- (6) 外形基準の位置入力]を再度行って下さい。
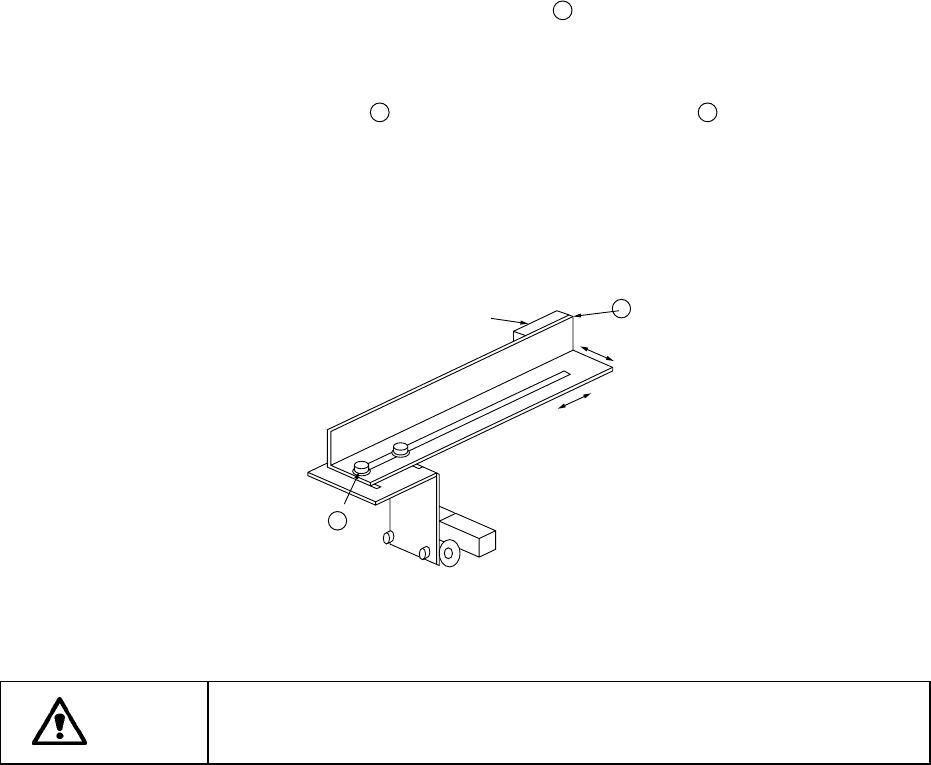
c. 基板検出センサ(図 6-1-3-10)
IN センサ①及び OUT センサ②はセンサブラケット
42
の取付けを変えることによって,検出
位置を変えることが出来ます。
1) 本体の電源をオフします。
2) さらに,センサブラケット
42
を固定している M3 六角穴ボルト
43
を緩め, 長穴に沿って
前後左右に移動することが出来ます。
3) 調整後は再び各取付けねじを締めて下さい。
4) マニュアル制御の搬送系または,プログラム編集の中の搬送にて基板にセットされるこ
とを確認して下さい。
図
図図
図 6-1-3-10
危険
不意の起動による事故を防ぐため,電源を切ってから行って下さい。
42
43
① ②