KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第464页
6 – 129 3 )レーザー高さ単独検査中画面 レーザー高さ単独検査中は以下のダイアログが表示されます。 検査を行ってい る部品内容/ 吸着位置/レーザ ー高さが表示され、逐 次実行中の処 理内 容を表示していきます。 図 図 図 図 6-7- 2-5-4-3 レーザー高さ単独検査中 レーザー高さ単独検査中 レーザー高さ単独検査中 レーザー高さ単独検査中 4) レーザ高さ検査結果 レーザセンタリングが実行できた場合のレーザステ…
6 – 128
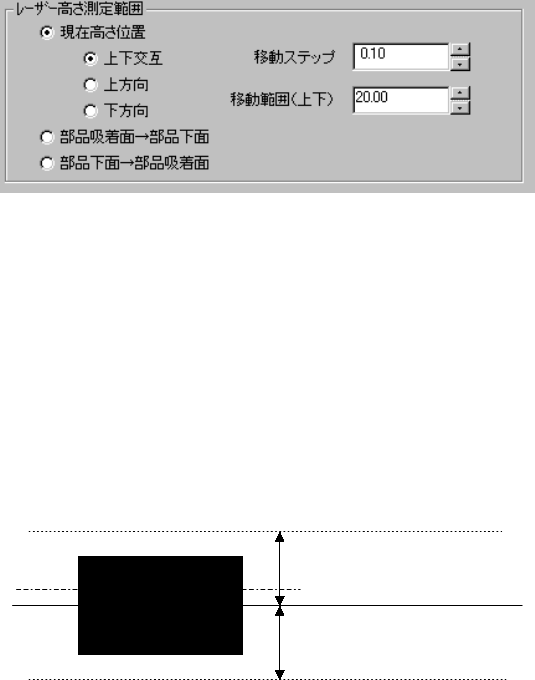
2) レーザ高さ判定範囲
① 現在高さ位置
レーザ高さ判定値に表示されている レーザ高さ値から設定された範囲の間繰り返し
測定します。レーザセンタリング成功した場合は測定が終了します。
以下をラジオボタンで選択します。
1) 上下交互
2) 上方向
3) 下方向
また1ステップ単位の移動量と,上下方向の範囲をエディットボックスに入力します。
部品側面
移動範囲
移動ステップ
現在レーザー高さ
移動範囲
図
図図
図 6-7-2-5-4-2
レーザ高さ判定範囲(現在高さ)
レーザ高さ判定範囲(現在高さ)レーザ高さ判定範囲(現在高さ)
レーザ高さ判定範囲(現在高さ)
② 部品吸着面−>部品下面
③ 部品下面−>部品吸着面
レーザ高さ判定値に表示されている値とは別に部品高さの範囲を測定します。開始点
は吸着面からと下面からとが可能です。
6 – 129
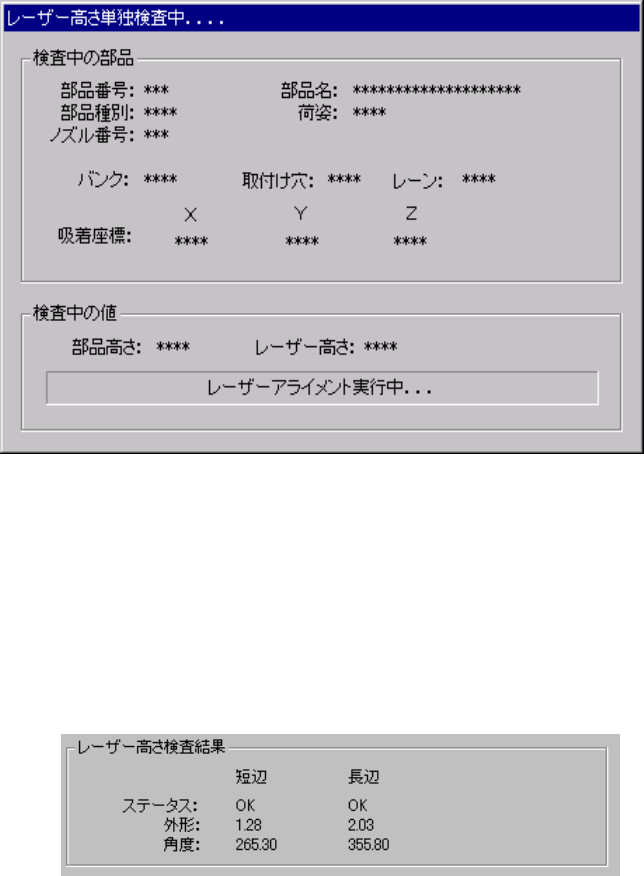
3)レーザー高さ単独検査中画面
レーザー高さ単独検査中は以下のダイアログが表示されます。
検査を行っている部品内容/吸着位置/レーザー高さが表示され、逐次実行中の処理内
容を表示していきます。
図
図図
図 6-7-2-5-4-3 レーザー高さ単独検査中
レーザー高さ単独検査中レーザー高さ単独検査中
レーザー高さ単独検査中
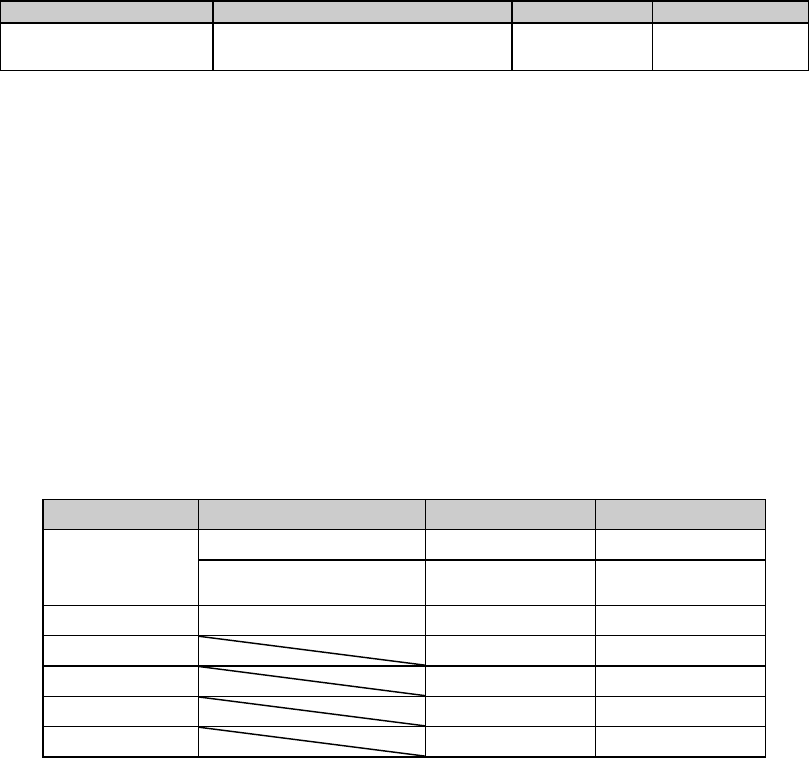
4) レーザ高さ検査結果
レーザセンタリングが実行できた場合のレーザステータス値が表示されます。表示内容
は検査時の意味と同等です。
6 – 130
6-7-3. SOT
方
方方
方向検査
向検査向検査
向検査
6-7-3-1.
概要
概要概要
概要
三端子
の方向検査を
にて行います。
6-7-3-2.
検査機能
検査機能検査機能
検査機能
三端子
方向検査の機能を表
に示します。
表
表表
表
方向検査機能
方向検査機能方向検査機能
方向検査機能
検査
検査内容 動作区分 備考
三端子SOT方向検査
三端子のSOTの方向が正しいかどうかを判
定する検査
単独検査
連続検査
6-7-3-3.
諸動作
諸動作諸動作
諸動作
吸着に使用するヘッド
吸着に使用するヘッドの選択については自動的にヘッドが選択されます。既に装着済みのノズル
を優先しノズル交換が少なくなるようヘッドを使用していきます。ノズルの装着状況によっては
検査毎に、ヘッドが異なることがあります。
対象部品サイズ
対象とする
の部品サイズは
∼□
とします。電極寸法は長さ
∼
、幅
∼
までです。
検査後の部品返却
検査後の部品を元の位置に戻す場合と、破棄する場合があります。下表に示すよう荷姿によって
異なります。問い合わせダイアログが表示され、部品を廃棄するかどうかの選択をします。廃棄
する場所は部品データの「部品廃棄」の設定に基づきます。連続測定時には開始前にすべてを廃
棄するか、その都度問い合わせダイアログを表示するかの選択ダイアログが表示されます。
表
表表
表
部品返却
部品返却部品返却
部品返却
廃棄条件
廃棄条件廃棄条件
廃棄条件
廃棄方法が「
回収ベルト」「部品保護」の場合は
廃棄を行います。
③吸着する供給装置の選択
同一部品に複数の供給装置(吸着データ)がある場合、デフォルトでは最初に入力したデータか
ら部品を吸着します。単独検査のみ供給装置を意図的に変更することも可能です。
吸着座標の変更
吸着がうまくいかない場合などに、手入力やHODデバイスを使用して座標ティーチングを行い
吸着座標を変更します。
手動吸着
吸着データがない場合に部品を手動でノズルに装着することができます。この場合、吸着座標は
入力不可となります。また、フィーダも操作できません
。
検査
吸着した部品は
方向検査ステージに搭載姿勢
°の状態で搭載され、左
によって角度正否の
判定を行います。