KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第536页
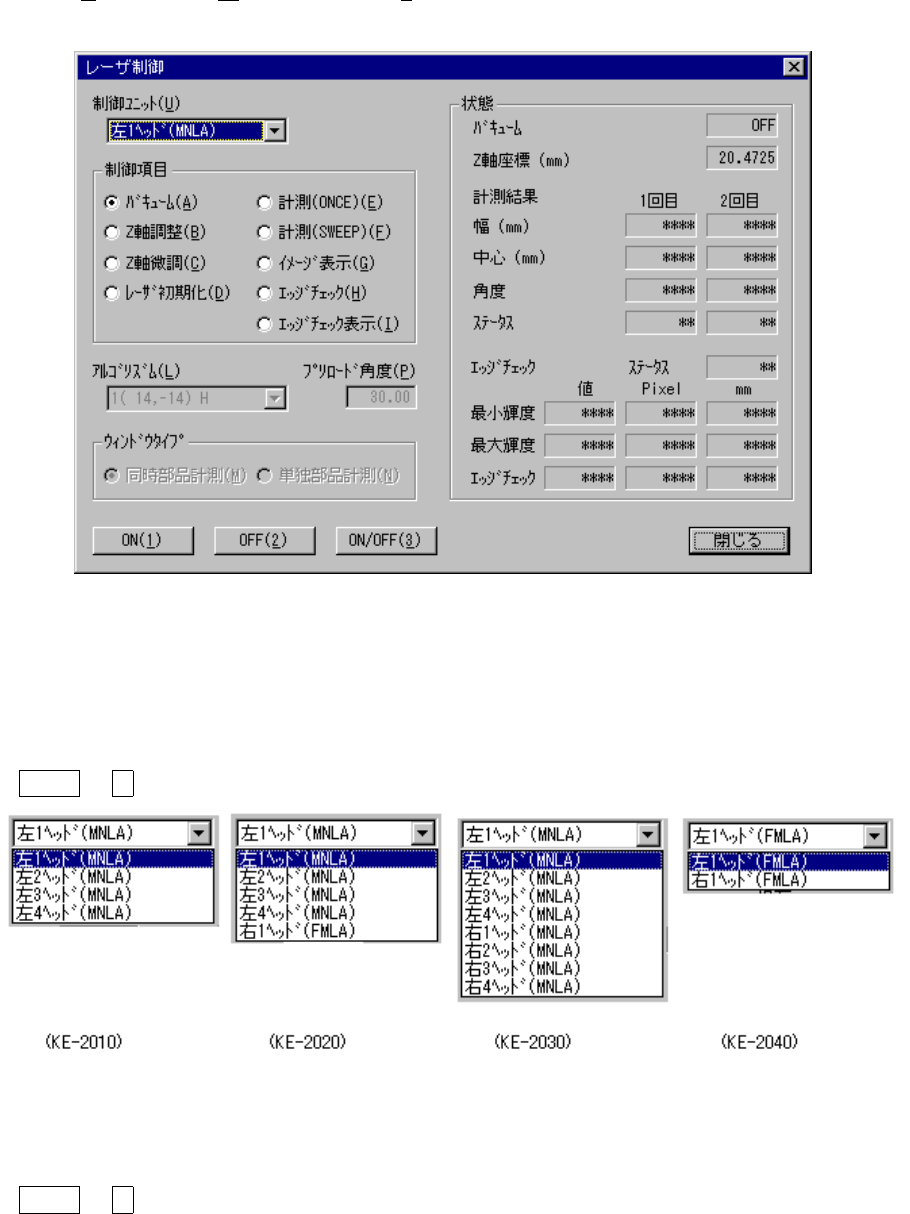
8 - 15 8-2-3. レーザ制御 レーザ制御 レーザ制御 レーザ制御 [制御( C )] [ヘッド( H )][レー ザ 制御( L ) ... ]を選択すると、下記のレーザ制御のダイアログ が表示されます。 図 図 図 図 8-2- 4 レーザ制御ダイアログ レーザ制御ダイアログ レーザ制御ダイアログ レーザ制御ダイアログ (1) 制御ユニット 制御対象ユニットをコンボボックスにより選択します。 マシンセ ットアップの“…
8 - 14
③ 制御ユニットで HMS を選択したときの制御方法
1) XY 軸移動
ヘッド制御の XY 軸移動と同様です。
2) 計測
高さ計測装置
制御項目の“計測”がチェックされているときに<実行(1
)>ボタンを選択するかまた
は、F3キーを押して制御します。
計測結果の状態表示は、制御完了時に更新されます。
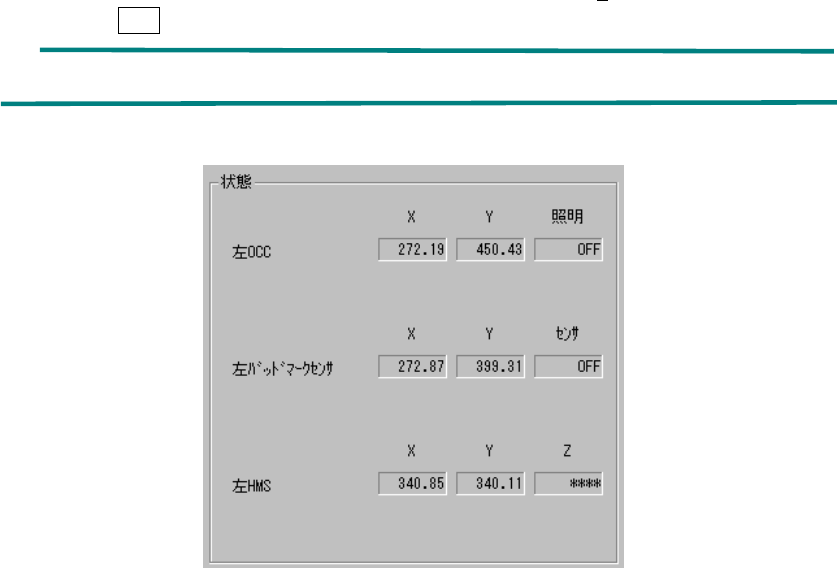
(4) 状態表示
① OCC
XY 軸座標、照明の ON/OFF を制御完了時に表示します。
② バッドマークセンサ
XY 軸座標、センサの ON/OFF を制御完了時に表示します。
センサの ON/OFF は連続表示します。
③ HMS
XY 軸座標、Z 軸座標を制御完了時に表示します。
8 - 15
8-2-3.
レーザ制御
レーザ制御レーザ制御
レーザ制御
[制御(C
)][ヘッド(H)][レーザ制御(L)...]を選択すると、下記のレーザ制御のダイアログ
が表示されます。
図
図図
図 8-2-4
レーザ制御ダイアログ
レーザ制御ダイアログレーザ制御ダイアログ
レーザ制御ダイアログ
(1) 制御ユニット
制御対象ユニットをコンボボックスにより選択します。
マシンセットアップの“使用ユニット”での設定には影響しません。(チェックされていない(使
用しない)ユニットも選択可能)
Alt + ↓キーで、下記の一覧表が表示されます。
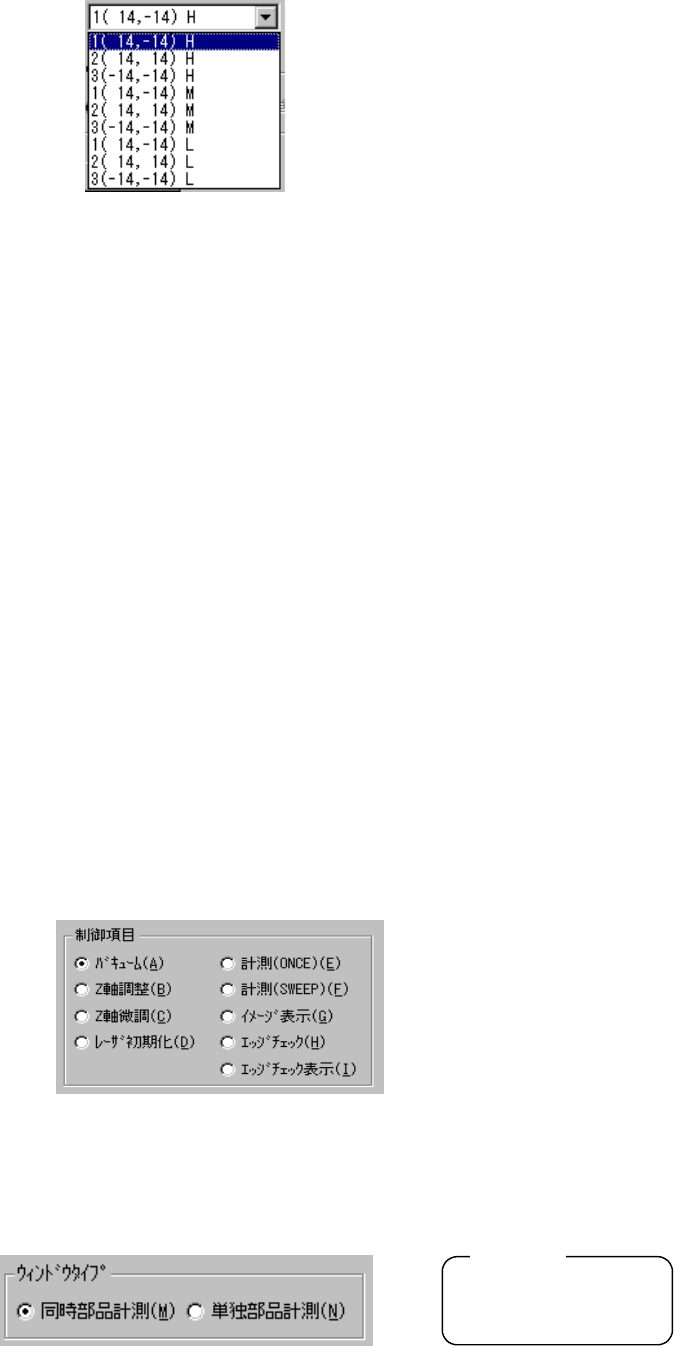
(2) アルゴリズム
計測(SWEEP)実行時のレーザのアルゴリズムをコンボボックスにより選択します。
制御項目で“計測(SWEEP)”以外を選択したときは、設定できません。
Alt + ↓キーで、下記の一覧表が表示されます。
8 - 16
アルゴリズムは表示の左にある数字がアルゴリズムを表し,右のアルファベットが SWEEP 時のθ回
転速度を表します。
アルゴリズム 1(14, –14) : 現在位置からプリロード角度分を逆回転した位置から,θを回
転させて影幅が最小となる位置(1回目)を見つけます。そ
の後検出した最小幅の位置から90度を回転させて第2の最
小幅(2回目)を検出します。
部品データで設定するレーザ認識アルゴリズムのアルゴリズ
ム1に相当します。
2(14, 14) : 現在位置からプリロード角度分を逆回転した位置から,θを回
転させて影幅が最小となる位置(1回目)を見つけます。そ
の後検出した最小幅の位置からθを回転させて第2の最小幅
(2回目)を検出します。
部品データで設定するレーザ認識アルゴリズムのアルゴリズ
ム2に相当します。
3(–14, –14) : θは回転せず,実行時の位置で影を検出します(1回目)。そ
の後回転させた位置で影を検出します(2回目)。
部品データで設定するレーザ認識アルゴリズムのアルゴリズ
ム2に相当します。
速度 H:高速,M:中速,H:低速
(3) 制御項目
制御項目をラジオボタンにより選択します。
(4) ウィンドウタイプ
計測時のウィンドウタイプをラジオボタンにより選択します。
制御項目で“計測(ONCE)”、“計測(SWEEP)”以外を選択したときは、設定できません。
注意
注意注意
注意 :
MNLA ヘッド以外は
設定できません。