CUKYX-193-3100_G5S2.pdf - 第183页
193-3100 CUKYX 2.4 横梁 2-25 [3] 直交角度 X[°] 直交角度 X 是指装置上标记的 X 方向相对于装置基准坐标系的 X 方向 的角度偏移量。 在装置上确认不易受温度影响的 3 点标记,调整直交角度 X 使横梁 XY 轴正交,以保证贴装精度。 Xm(+) Ym(+) Yb(+) Xb(+) Yb(+) Xb(+) Xm' 装置基准坐标系 标记坐标系 横梁坐标系 装置上的标记 直交角度X 安装头原点 …
193-3100
CUKYX
2.4 横梁
2-24
2.4 横梁
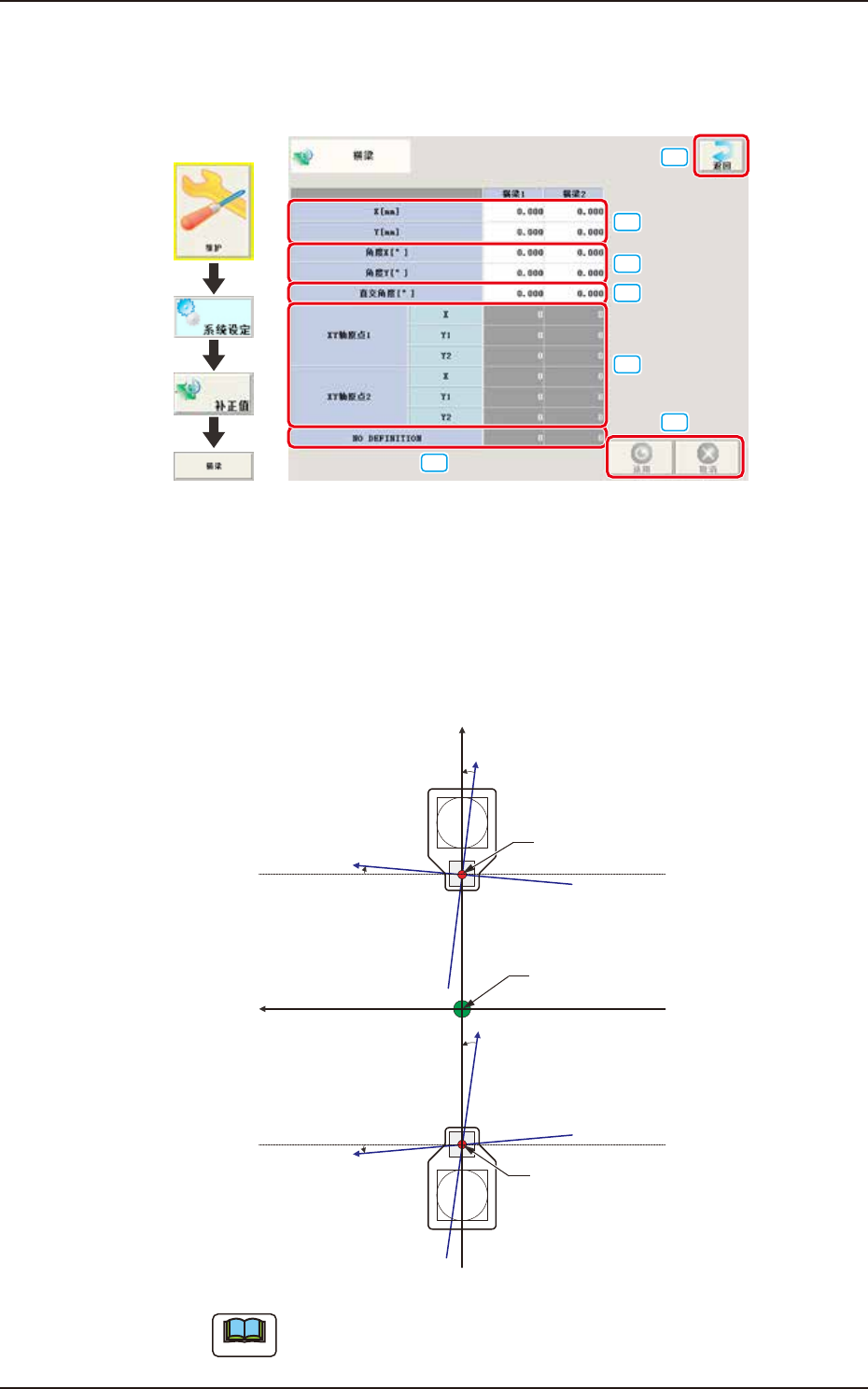
在“补正数据”界面按 [ 横梁 ] 按钮,显示如下界面。
界面展开
[1]
[2]
[3]
[4]
[5]
[6]
[7]
F3227-CUKYX-00
[1] X、Y[mm]
调整从装置基准坐标系原点和安装头原点位置到线路板识别相机中心相对
于设计尺寸的位置偏移量。
[2] 角度 X、角度 Y[°]
使横梁 X 轴与 Y 轴对准装置基准坐标系。
Xm(+)
Ym(+)
Yb(+)
Xb(+)
Yb(+)
Xb(+)
Xm-Ym : 装置基准坐标系
Xb-Yb : 实际横梁坐标系
安装头原点
Pm.装置基准坐标原点
安装头原点
F3228-CUKYX-00
要 点
以装置基准坐标系为基准实际横梁坐标系往逆时针方向倾斜时,横梁
角度补正值设为“+”。
193-3100
CUKYX
2.4 横梁
2-25
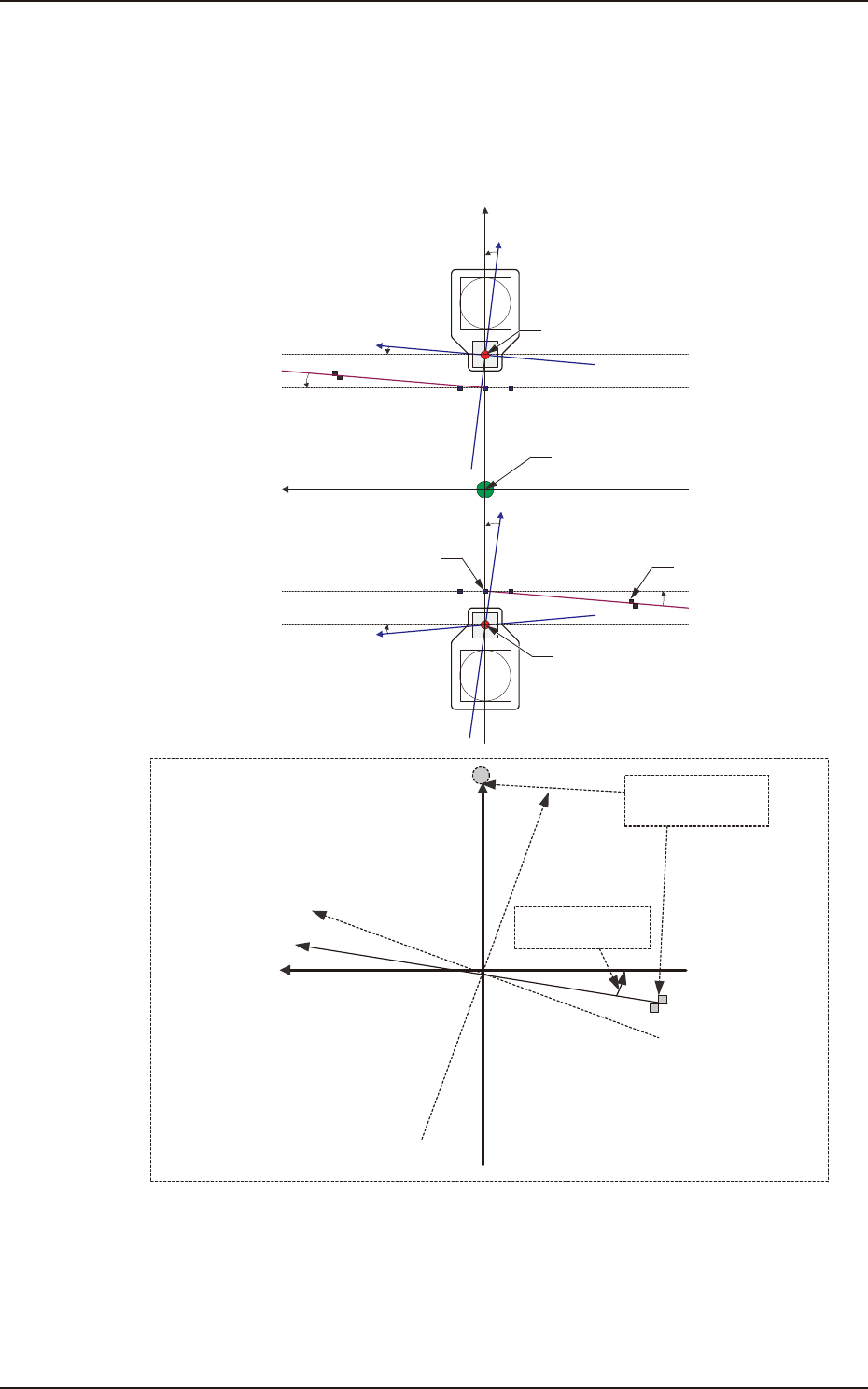
[3] 直交角度 X[°]
直交角度 X 是指装置上标记的 X 方向相对于装置基准坐标系的 X 方向
的角度偏移量。
在装置上确认不易受温度影响的 3 点标记,调整直交角度 X 使横梁 XY
轴正交,以保证贴装精度。
Xm(+)
Ym(+)
Yb(+)
Xb(+)
Yb(+)
Xb(+)
Xm'
装置基准坐标系
标记坐标系
横梁坐标系
装置上的标记
直交角度X
安装头原点
Pm.装置基准坐标原点
基准标记2
安装头原点
Xm-Ym : 装置基准坐标系
Xb-Yb : 实际横梁坐标系
基准标记1
F3229-CUKYX-00
193-3100
CUKYX
2.4 横梁
2-26
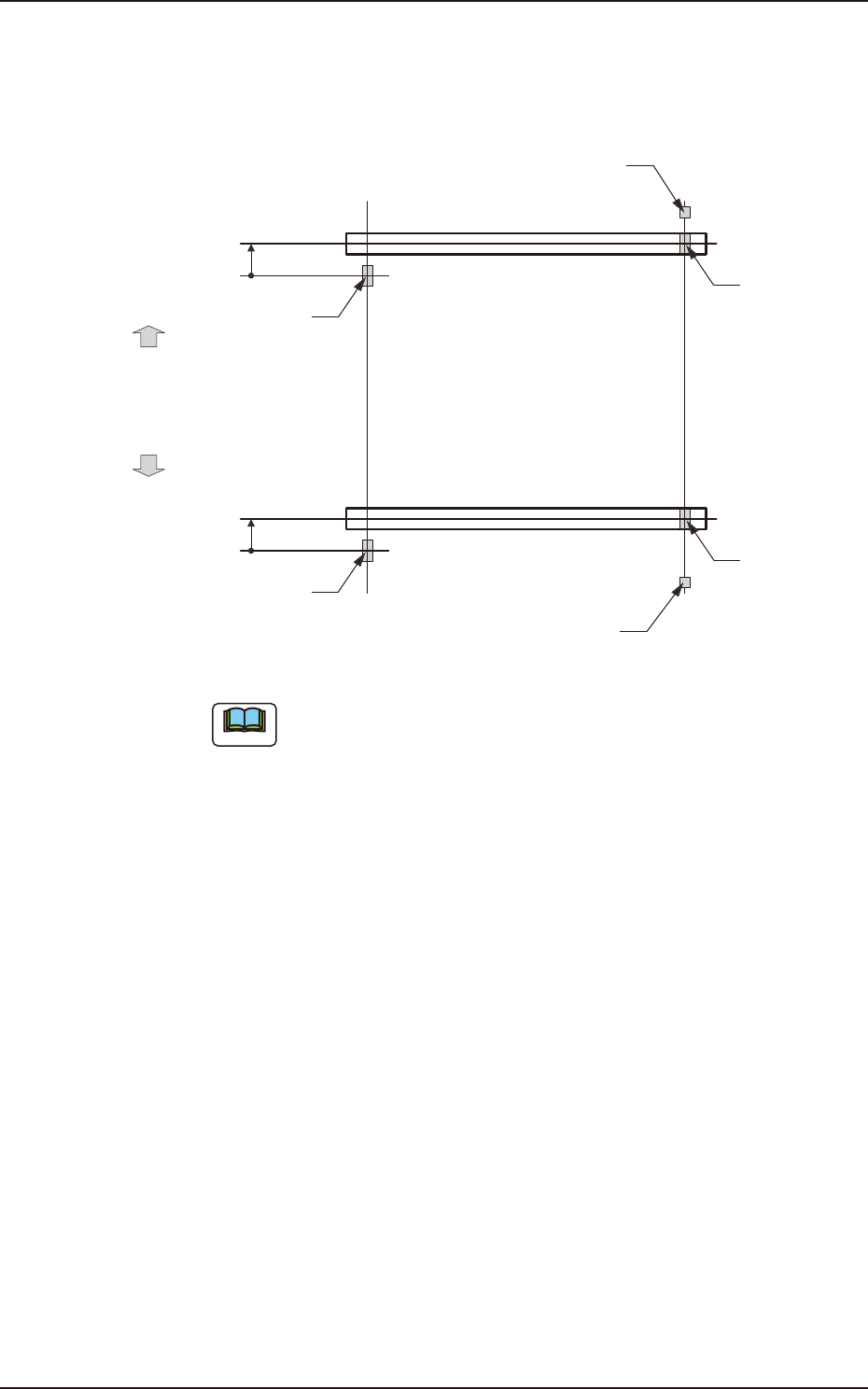
[4] XY 轴原点 1、2
本值是为保持装置组装后的横梁状态 ( 位置 ) 的补正值。
执行动态控制器的 Y 轴原点复位 ( 调整模式 ),使用从动态控制器自动
返回的值。
主动侧
从动侧
原点标记
(原点信号位置)
横梁
横梁
原点复位方向
原点复位方向
Y 轴原点补正值=(+)值
溢位传感器
Y 轴原点补正值=(+)值
原点标记
(原点信号位置)
原点标记
(原点信号位置)
原点标记
(原点信号位置)
溢位传感器
F3230-CUKYX-00
要 点
(a) 该补正值只显示,不能手动输入。
(b)Y 轴原点补正值,是指从从动轴的原点信号位置向原点复位方向
看时主轴的原点信号位置在何处。与原点复位方向一致时为“+”,
与原点复位方向相反时为“-”。
[5] NO DEFINITION
显示自动调整的 Y 轴并列驱动轴 ( 从动轴、主动轴 ) 的原点信号位置
的补正值。
[6] [ 返回 ] 按钮
返回到“补正数据”界面。
[7] [ 适用 ] 按钮
应用输入的数据。
[取消]按钮
取消输入的数据,恢复保存的数据。