Administrator’s Guide-Chinese(SM320) - 第164页
Samsung Component Placer SM320 Administrator ’ s Guide 有关部品的供应角度和吸着角度的定义 供应角度 ( 作为使用者时 ): 供应角度以给喂料器供应部品的角度为准。不管 喂料器安装在正面还是背面,是把 部品装在喂料器时的角度。 0도 90도 180도 270도 <SK> 列 该 Slot 上装有带式喂料 器时,选择装在带式喂料器的部 品的吸着与否 需要吸着时,要保持检…
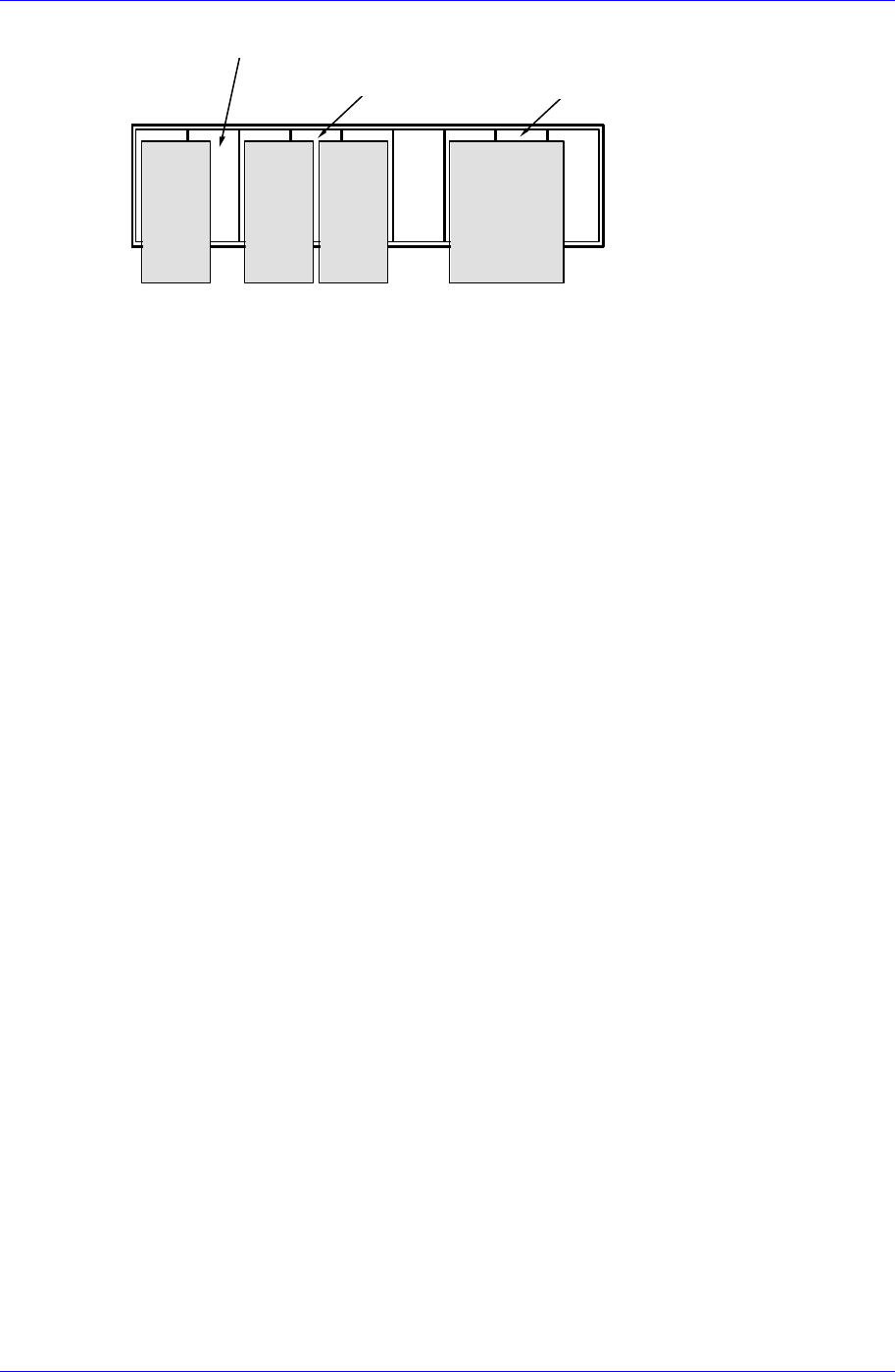
供应装置的设置
8-3
1
Half
상태인
Slot
2
Half
상태인
Slot
Full
상태인
Slot
2 半部份状态的 Slot
充满状态的 Slot
1 半部份状态的 Slot
<Push> 列
该 Slot 上装有带式喂料器时,选择带式喂料器前进 1 间距时必要的 Push 次
数。
该 Slot 上装有带式喂料器时,设定吸着装在带式喂料器的部品的 X 轴方向
装在带式喂料器的部品的 Y 轴方向
的位置。
<Z> 列
该 Slot 上装有带式喂料器时,设定吸着装在带式喂料器的部品的 Z 轴方向
的位置。
<R> 列
该 Slot 上装有带式喂料器时,设定吸着装在带式喂料器的部品的 R 轴的位
置(Head 的旋转角度)。
<PartR> 列
该 Slot 上装有带式喂料器时,设定装在带式喂料器的部品的贴装角度。
<X> 列
的位置。
<Y> 列
该 Slot 上装有带式喂料器时,设定吸着
Samsung Component Placer SM320 Administrator’s Guide
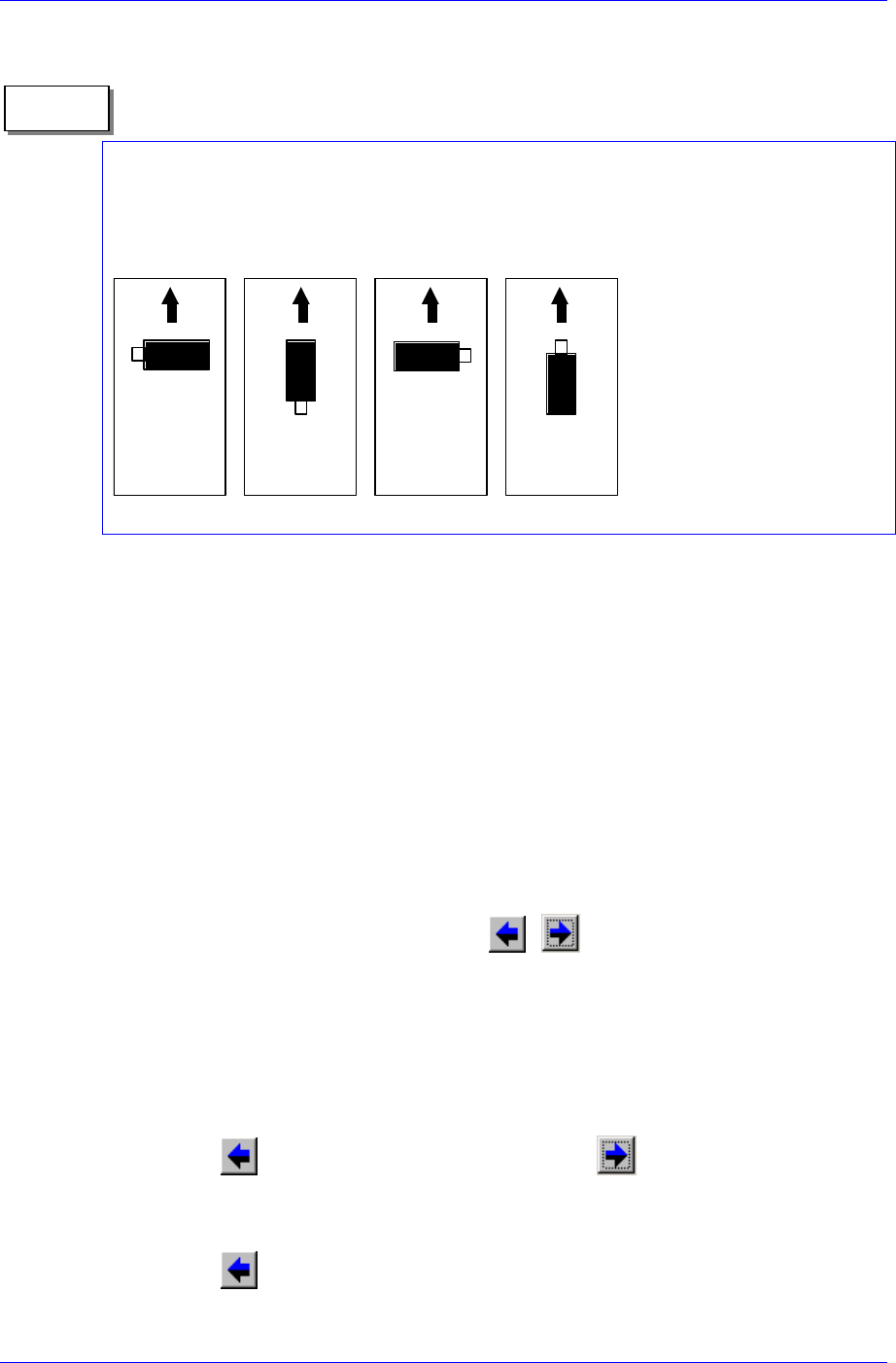
有关部品的供应角度和吸着角度的定义
供应角度 (作为使用者时):
供应角度以给喂料器供应部品的角度为准。不管喂料器安装在正面还是背面,是把
部品装在喂料器时的角度。
0도 90도 180도 270도
<SK> 列
该 Slot 上装有带式喂料器时,选择装在带式喂料器的部品的吸着与否
需要吸着时,要保持检查框未检查的状态,不要吸着时,要确认检查框。
<Dump> 列
该 Slot 上装有带式喂料器时,选择安装在带式喂料器部品废料盒可选择的
废料盒如下。
系统废料盒: 作为设定在系统的废料盒,它安装在设备的传送装置前面。
用户自定义废料盒: 作为使用者设定在系统的废料盒,在系统设定其位
置。
<Unit> 领域
选择所要编辑的 Feeder Base Unit。
, 按钮用于选择Feeder Base。
1–Front Feeder Base(前面Feeder Base), 2-Rear Feeder Base (后面Feeder Base)
<Slot Move> 按钮
选择Slot别移动所选Device还是设置Tape Feeder的Slot别移动所选Device 。
每次点击此按钮时轮着设定“Slot Move”和 “Feeder Move”。
Slot Move时
按钮选择当前选定Slot以前的Slot, 按钮选择当前选定Slot的
以后 Slot。
Feeder Move 时
按钮在当前选定的设置 Feeder的Slot的以前Slot中选择设置Tape
Feeder的Slot(按Slot序号小的顺序),
备注
0 度 90度 180度 270度
8-4

供应装置的设置
置Feeder的Slot的以后Slot中选择设置Tape Fe
大的顺序)
<示教> 领域
用于旋转XY轴驱动电动机把选定的对象移动指定的坐标位置或用于获取已选对
象的当前坐标。
8-5
按钮在当前选定的设
eder的Slot。(按Slot 序号
选择要移动到指定坐标位置的对象或用于选择所
Camera。
头1: 指定1号头。
头 2: 指定 2 号头。
头 3: 指定 3 号头。
头 4: 指定 4 号头。
5 号头。
头 6: 指定 6 号头。
光点: 指定光点。 (选项)
<移动> 按钮
组合框中选择的对象移动到指定的坐标位置。 运行
“移动”之前,先要用
鼠标单击需要移动的位置的坐标值对应的Grid的shell(Tape Feeder的吸附点
坐标)。
<得到> 按钮
以组合框中选择的对象为基准获取X, Y坐标。 运行 “得到”之前,先要用
鼠标单击需要移动的位置的坐标值对应的Grid的shell(Tape Feeder的吸附点
坐标)。
<拾取> 按钮
对当前 “Feeder Base”对话框中选择的Tape Feeder执行部件吸附。此时,应该预
先选择Device(要执行吸附的磁头) 成功地吸着后显示以下对话框。
组合框
用于旋转XY轴驱动电动机
要获取当前坐标的对象。可选择的对象如下。
Fid Cam:选择 Fiducial
头 5: 指定