Administrator’s Guide-Chinese(SM320) - 第269页
Machine Calibration 头 5: 指定 5 号头。 中选择的对象移动到指定的坐 标位置。此时,点击 < 移动 > 按钮之 对话框。 14.1.2. 设置 Off 果值 ( Update )。 头 6: 指定 6 号头。 光点 : 指定光点。 ( 选项 ) < 移动 > 按钮 组合框 前应该用鼠标点击所要的编辑框 。 < 得到 > 按钮 以组合框中选择的对象为…

Samsung Component Placer SM320 Administrator’s Guide
<Z
设定 向的移动高度的限度。此限定高度的基准位置是安装PCB的上表面
为了吸着部品 Z 轴下降时,设定下降高度的限度。
(Pickup)元件时限制元件的拾取位置不得超出-10 以
gram Download 时通过错误提示显示在
品 Z 轴下降时,设定下降高度的限度。
cement)时可以设置的最小值, Default 值为“-11”。
<
为 限度。
<He
设定 置。 要修改当前设定的位置,请重新示教该位置
。
sembly 的等待位置。
,载入 PCB 时,将使贴片头移动到在这里设置
Wait Type 设为 PCB 时 PCB 上有 Fiducial Mark,
;没有 Fiducial Mark 时,贴片头就在最
元件的装置(Feeder)的 Pickup 位置上等待。
,
的等待位置。
设定按下 备背面的运转面板的 “Rear feeder change”按钮时,
Head Assembly 的等待位置。
领域
于回转XY, Z轴驱动电动机把选择的对象移动到指定的坐标位置,或用
获取已选对象的当前坐标位置。
择Fid Cam: Fiducial Camera。
1: 指定 1 号头。
头。
轴极限> 领域
Z轴方
。
<向下吸取料> 编辑框
“-10”值是为了在拾取
下而设置的 Software Limit。如果输入了无效值,本设备将检查所设置的
Limit 值,并且在进行动作或 Pro
屏幕上。
<向下贴装> 编辑框
为了贴装部
贴装(Pla
向下换嘴> 编辑框
了在 ANC 交换吸嘴 Z 轴下降时,设定下降高度的
ad Block Wait Position> 领域
Head Assembly的等待位
<PCB 进入> 编辑框
设定安装 PCB 时 head as
如果 Wait Type 设为 System
的坐标位置后等待。
如果 Auto,当载入
贴片头就在 Fiducial Mark 位置等待
先供应贴装(Placed)
<当前面换料按钮按下> 编辑框
设定按下设备正面的运转面板的 “Front feeder change”按钮时
Head Assembly
<当后面换料按钮按下> 编辑框
设
<Teach>
<Device> 组合框
用
于
选
头
头 2: 指定 2 号头。
头 3: 指定 3 号
头 4: 指定 4 号头。
14-2
Machine Calibration
头 5: 指定 5 号头。
中选择的对象移动到指定的坐标位置。此时,点击 <移动> 按钮之
对话框。
14.1.2.
设置
Off
果值 (Update)。
头 6: 指定 6 号头。
光点: 指定光点。 (选项)
<移动> 按钮
组合框
前应该用鼠标点击所要的编辑框。
<得到> 按钮
以组合框中选择的对象为基准获取 X, Y 坐标。此时,点击 <得到> 按钮
之前应该用鼠标点击所要位置相应的编辑框。
<更新> 按钮
把设定的数据传送到设备之后关闭
<取消> 按钮
忽略设定的数据直接关闭对话框。
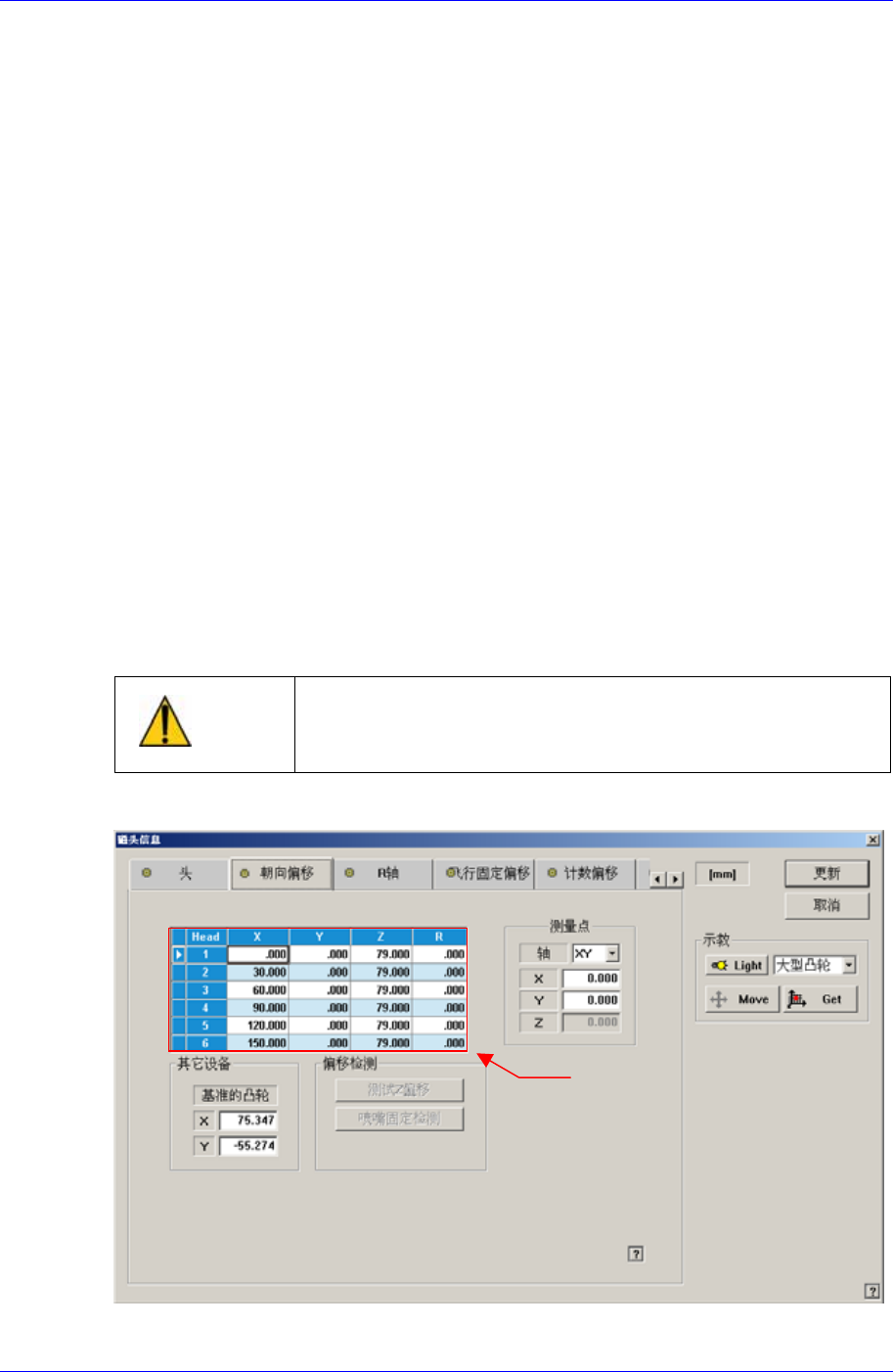
<Head Offset> TAP对话框
各因各磁头机械特性的偏移。 这里显示的除 Z, R轴的磁头偏移( Head
set)信息在 Camera Calibration过程中 执行Head Offset Calibration后,反映该结
,将被自动升级
实际各磁头贴装时,反映偏移值进行贴装,因此用户任意修
注 意
。
改设定值,会发生磁头损伤及作业不良,请勿任意修改数据
Grid 领域
图
14-2. “Sys. Setup: Head Information”
对话框的
“Head Offset” TAP
画面
14-3

Samsung Component Placer SM320 Administrator’s Guide
Y偏移值。当XY轴找到HOME时的磁头1的Y位置定为0,以此值为基
值。
值。 偏移值的基准为当PCB机盘加载时, PCB顶面为基准。
置R偏移值。
编辑框
设置Fiducial Camera的XY偏移值。
<Measure Point>领域
设置各磁头对Z轴偏移测定位置的 X, Y
值。
<Axis> 组合框
为测定偏移,输入XY, Z 坐标值。
<Detect Z Offset>按钮
自动设置磁头的Z轴偏移值。
执行所有校正之前最先应设定 Head的Z轴偏移和R轴偏移。 在这里提示的是利
用空压自动设定Z轴偏移的方法和利用视力(vision)设定 R轴偏移的方法,用
在设定Z轴偏移的校正用吸嘴是CN040 吸嘴。
下一步是 Z Offset Calibration执行方法。
1. 在<Grid>领域点击要执行校正Head的Z轴,再点击 <Detect Z Offset> 按钮
。(在这里任意用Head 1设定)
<Grid> 领域
设置磁头之间的偏移值。
<Head> 列
表示磁头(Head)序号。
<X> 列
设置X偏移值。当XY轴找到HOME时的磁头1的X位置定为0,以此值为基
准设置偏移值。
<Y> 列
设置
准设置偏移
<Z> 列
设置Z偏移
<R> 列
设
<Other Device> 领域
设置Head以外的Device偏移值。
<Fiducial Cam>
14-4