Administrator’s Guide-Chinese(SM320) - 第70页
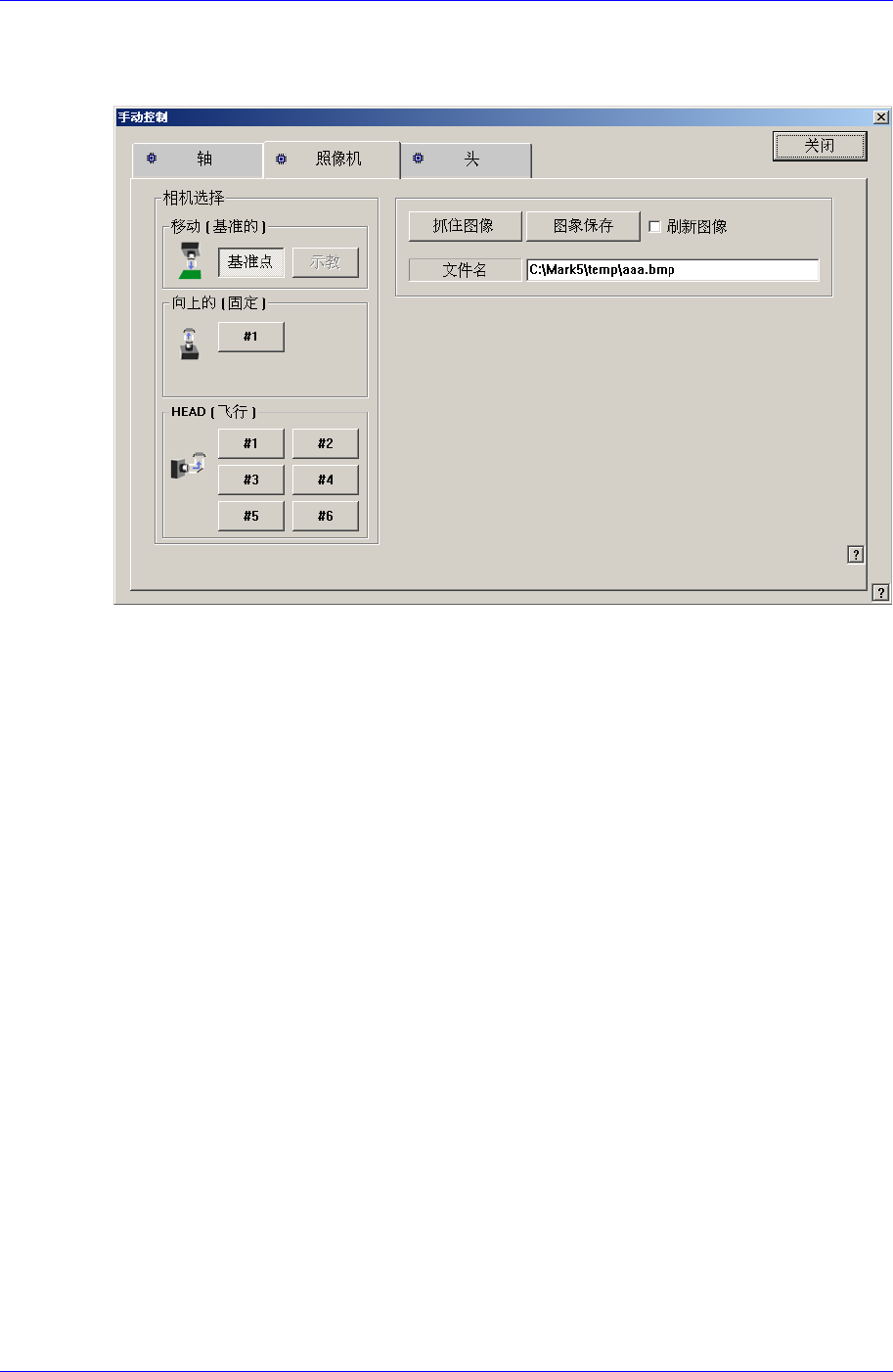
Samsung Component Placer SM320 Administrator ’ s Guide 4.7.2. Camera T AP 对话框 通过 Vi s F r a m e 显示各 Camera 的状态,捕捉 Vi s i o n 形象进行保 存。 图 4-9. “ 手动操作 – 照相机 ” 对话框 4-18

Tools
简化操作
(shortcut)
菜单
2: 快速驱动所选电动机。 (Fast)
3: 中速驱动所选电动机。 (Middle)
4: 慢速驱动所选电动机。(Slow)
5: 最慢的速度驱动所选电动机。 (Slowest)
<位置> 领域
用于输入所要移动位置的坐标或以所选装置为基准把对象移动到输入坐标位置
并获取该对象的当前坐标。 编辑框中输入的值如下。
X: X轴的坐标值
Y: Y 轴的坐标值
如果被选对象为输送机宽度调节电动机,应输入的不是Y坐标,是输送机
宽度。
Z: Z 轴坐标
R: Theta 轴角
<移动> 按钮
以所选装置为基
<得到> 按钮
获取被选对象的当前位置(坐
<Move To Fix Camera> 按钮
选择的对象移动到Fix Camera位置。
<原始> 组合框
选择基准原点的方式。 可选择的基准原点如下。
设备配置合理: 指定设备的原点为基准原点。
前面喂料器座(1): 指定前置工序的喂料器组的原点为基准原点。
后面喂料器座(2): 指定后置工序的喂料器组的原点为基准原点。
状态表示领域
显示手动操作时发生的信息。
度
准把对象移动到输入坐标位置时使用。
标或角度)其结果显示在状态表示领域。
4-17
Samsung Component Placer SM320 Administrator’s Guide
4.7.2. Camera TAP对话框
通过VisFrame显示各Camera的状态,捕捉Vision形象进行保存。
图
4-9. “
手动操作
–
照相机
”
对话框
4-18

Tools
简化操作
(shortcut)
菜单
Camera的照明或检查磁头动作。
<Head Inspection> 领域
4-19
4.7.3. Head TAP对话框
利用Vision System手动识别部件,设定
图
4-10. “
手动操作
–
头
”
对话框
<Move all head to align height> 按钮
为部件识别,把所有磁头的吸嘴末端对准Align 高度。
e> 按钮
<Nozzle Put All> 按钮
还到ANC。
55]> 领域
各个像素因显示亮度不同,有
。在这里‘Threshold Value’是指区分各个像素识别成白色还
于等于100时识别为白,小于100
<
通过 VisFr me 显示的影象显示成实际肉眼可看到的、或 MMI 识别的影
<
设定Fly Camera的照明值。选择要调节的Fly Camera后在<Light Value>领域调整
使用Side照明时,点击 <Down/Up> 按钮卡可以调节Side 照明
高度。
<Mirror Open/Clos
为部件识别打开或关闭Mirror。
把所有贴装在磁头的吸嘴返
<Part Dump All> 按钮
把所有吸附的部件扔到回收站。
<Threshold Value[0-2
通过VisFrame显示的影象由各个像素构成。
0~255的固有值
是黑色的临界值。在上图中MMI设置成大
则识别为黑色。
Real Display/Binary> 按钮
a
象(Binary)。
Camera Select & Light Change> 领域
滑条调节亮度。