00198458-04_UM_TX-V2_KO - 第141页
사용 설명서 SIPLACE TX 3 기술 데이터 및 어셈블리 소프트웨어 버전 714.0 에서 업데이트 12/2020 3.6 갠트리 시스템 141 3.6.4 Y- 축 구조 3 그림 3.6 - 4 Y- 축 구조 Y 축에는 반드시 다 음 주 모듈들이 포함되어 있어야 합니다 . (1) 고정 및 유동 베어링이 장착되어 있는 X- 축에서의 Y- 선형 모터 ( 주요부 ) (2) 영구 자석 (X 축 선형 …
3 기술 데이터 및 어셈블리 사용 설명서 SIPLACE TX
3.6 갠트리 시스템 소프트웨어 버전 714.0 에서 업데이트 12/2020
140
3.6.3 갠트리의 구조
3
그림 3.6 - 3 갠트리의 구소 - 헤드 마운트의 보기
(1) 헤드 보드
(2) 갠트리 암
(3) 고정 베어링 ( 주요부 ) 이 있는 Y 선형 모터
(4) 변화 보드 및 트레일일 케이블 홀도용 마운트
(5) 끝 위치 범퍼 (4x)
(6) 영구 자석이 있는 가이드 시스템 (X 라인 모터의 보조부 )
(7) 길이 측정 시스템
(8) X- 축 선형 모터가 있는 헤드 마운트 ( 주요부 )
(4)
(3)
(1)
(5)
(2)
(6)
(7)
(5)
(8)
사용 설명서 SIPLACE TX 3 기술 데이터 및 어셈블리
소프트웨어 버전 714.0 에서 업데이트 12/2020 3.6 갠트리 시스템
141
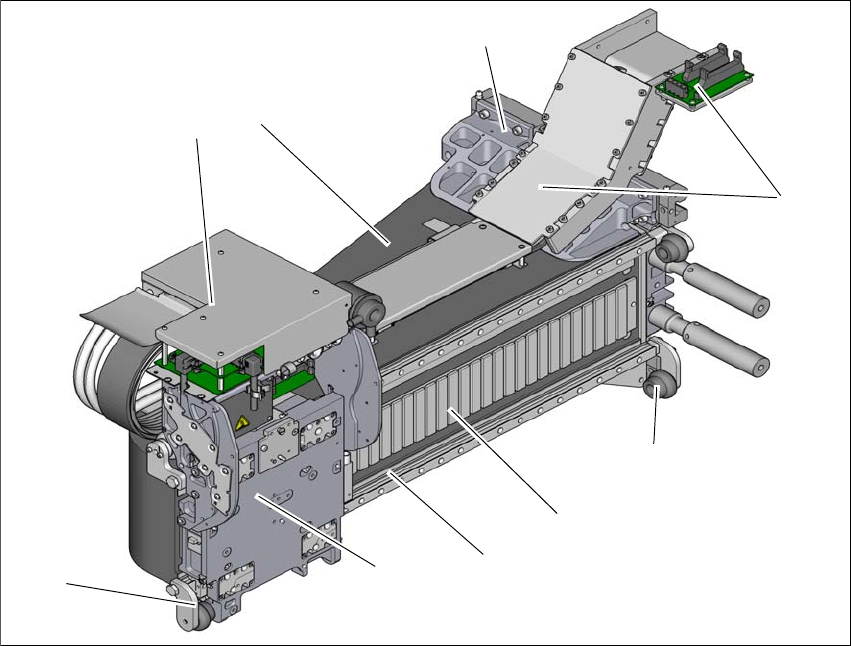
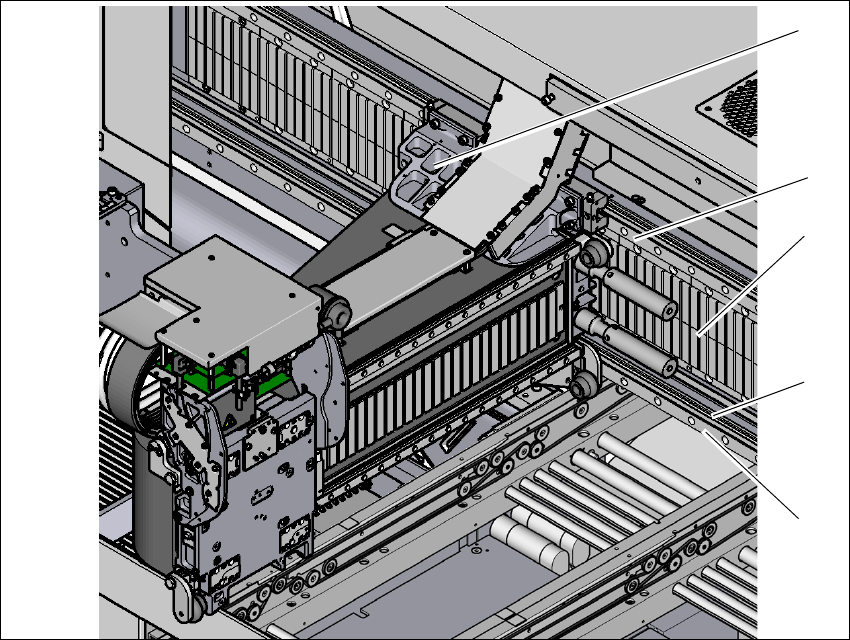
3.6.4 Y- 축 구조
3
그림 3.6 - 4 Y- 축 구조
Y 축에는 반드시 다음 주 모듈들이 포함되어 있어야 합니다 .
(1) 고정 및 유동 베어링이 장착되어 있는 X- 축에서의 Y- 선형 모터 ( 주요부 )
(2) 영구 자석 (X 축 선형 모터의 보조부 )
(3) 길이 측정 시스템
(4) 가이드 시스템
(1)
(4)
(3)
(2)
(4)
3 기술 데이터 및 어셈블리 사용 설명서 SIPLACE TX
3.7 PCB 컨베이어 시스템 소프트웨어 버전 714.0 에서 업데이트 12/2020
142
3.7 PCB 컨베이어 시스템
3.7.1 설명
PCB 컨베이어 시스템은 입력 , 처리 및 배출 컨베이어 부문과 같이 세 부분으로 디자인되어
있습니다 . 두 영역 즉 , 입력 컨베이어와 출력 컨베이어는 인쇄 회로 기판에 대한 버퍼 구역 역할을
합니다 .
컨베이어 벨트는 브러시리스 DC 모터에 의해 작동됩니다 . 광벽은 보드의 운반을 모니터하고
제어합니다 . 보드가 실장 영역에 도달하여 광벽을 지나면 멈추게 됩니다 . 레이저 광벽이 보드의
위치를 기록합니다 . 회로 보드가 자신의 목표 위치에 도달하는 순간 컨베이어 벨트가 멈추고
기판은 밑에서 고정됩니다 .
그러므로 각 PCB 에 대해 PCB 상단과 실장 헤드의 간격은 변동 없이 유지되며 PCB 두께의 영향을
받지 않습니다 . 그러므로 실장 속도도 PCB 두께의 영향을 받지 않습니다 . 또한 PCB 피듀셜
센터링도 최적화할 수 있습니다 . PCB 의 표면과 PCB 카메라 사이의 간격이 계속 동일하므로 PCB
카메라를 항상 동일한 선명도로 PCB 의 표면에 촛점을 맞춥니다 . PCB 피듀셜의 외곽선은 PCB
카메라의 CCD 칩에 최적 상태로 매핑됩니다 .
회로 기판 컨베이어의 폭은 내장된 제어 회로에 의해 설정되고 모니터링됩니다 . 이는 프로그램을
호출하여 선택할 수 있습니다 . 제어 전자 부품은 원하는 폭에 도달할 때까지 드라이브 모터를
작동시킵니다 . 그러므로 폭 조정은 다른 장비 컴포넌트의 영향을 받지 않습니다 .
컨베이어 높이가 900mm, 930mm 또는 950 mm 인 라인에 실장기가 통합될 수 있도록 실장기에서
컨베이어 높이를 선택할 수 있습니다 . 표준 높이는 930mm 입니다 .
각 실장기에 장착된 PCB 컨베이어 사이의 통신은 SMEMA 인터페이스를 통해 이루어집니다 .