JM-100_MS参数.pdf - 第102页
MS 参数 7- 11 -3-5 弯脚固定单元并行调整 调整弯脚固定单元 XY 并行轴与贴裝头裝置 XY 轴的并行状态。 关闭弯脚固定爪,将 弯脚固定单元移 动到 原 点 坐标 。 请以 OCC 示教弯脚 固定单元位置。示 教完成后,取得第 1 点的偏移量。 接着弯脚固定单元将 移动到第 2 点 、第 3 点的测量坐标 ,请用相同方法进行 示教。 7- 11 -4 MSP 容许值 No. 项目 MSP 容许值 MSP 值不良时 出现的问…

MS 参数
7-11-3-2 弯脚固定单元高度
取得弯脚固定单元的高度偏移量。
进行CZ轴的MSP用原点复归,移动到基板上面高度。
请以HMS基准示教弯脚固定单元位置。示教完成后,用HMS测量弯脚固定爪的高度。
测量弯脚固定爪高度时,将弯脚固定单元向X方向移动,测量3点的高度,以平均值作为弯脚固定单元
的高度偏移量。
完成取得后,以CZ轴进行通常的原点复归。
7-11-3-3 弯脚固定单元爪角度
取得弯脚固定单元的角度偏移量。
进行CT轴的MSP用原点复归,移动90°使爪成为打开状态。
然后,请示教爪的前端2处。示教完成后,算出爪的角度。
取得完成后,以CT轴进行通常的原点复归。
7-11-3-4 XY 轴原点偏移量
取得弯脚固定单元的XY轴原点偏移量。
进行XX、CY轴的MSP用原点复归,关闭CC轴,以OCC基准移动到处于原点位置的弯脚固定单元上。
然后,请用OCC示教弯脚固定单元位置。示教完成后,取得原点偏移量。
取得结束后,CX、CY轴进行通常的原点复归。
7-24
MS 参数
7-11-3-5 弯脚固定单元并行调整
调整弯脚固定单元XY并行轴与贴裝头裝置XY轴的并行状态。
关闭弯脚固定爪,将弯脚固定单元移动到原点坐标。
请以OCC示教弯脚固定单元位置。示教完成后,取得第1点的偏移量。
接着弯脚固定单元将移动到第2点、第3点的测量坐标,请用相同方法进行示教。
7-11-4 MSP 容许值
No.
项目
MSP
容许值
MSP
值不良时
出现的问题
检测项目
1
弯脚固定爪的原点
±
1mm
弯脚固定单元不良
2 弯脚固定单元高度 ±0.5mm
弯脚固定单元不良,基板支承
不良
确认向下方触及时的电动
机
Z
相位置。
3 弯脚固定单元爪角度 ±20° 弯脚固定单元不良
检查电动机
Z
相位置的装
配。
4 XY 轴原点偏移量
X
±10mm 弯脚固定单元不良
检查原点传感器与电动机
Z
相的位置关系。
Y
5
弯脚固定单
元同时对准
Mk1
X
±5mm
弯脚固定单元不良,基板支承
不良
检查弯脚固定单元底座的
装配位置
Y
Mk2
X
Y
Mk3
X
Y
7-25
MS 参数
贴片参数
8
8-1 元件计测速度
8-1-1 功能
当LNC120的旋转速度不一样时,对发生的角度偏移进行校正。
将激光测量中产生的对低速的偏离量作为偏移量算出。
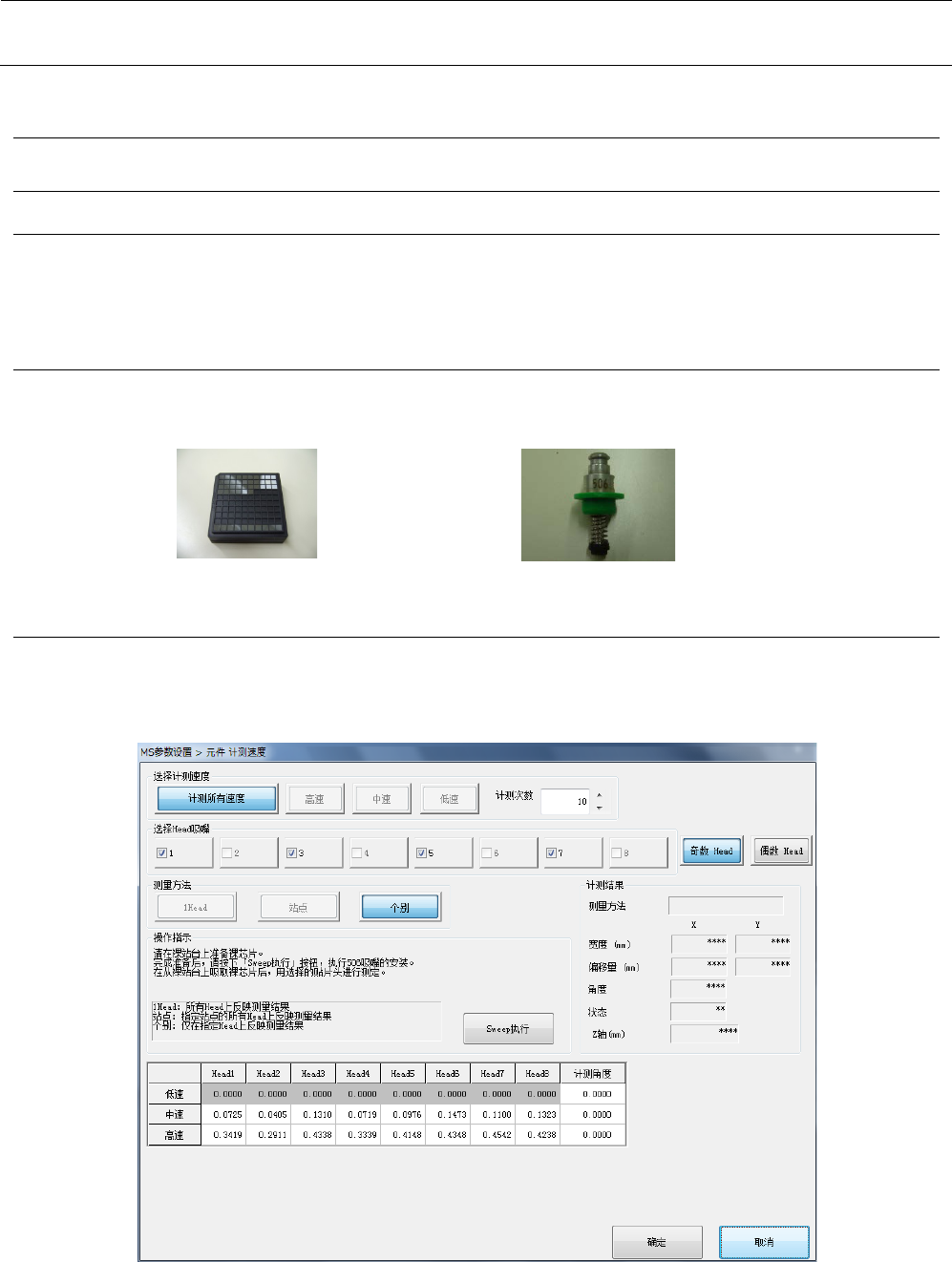
8-1-2 使用模具
• 3.7 DUMMY WAFER
(
40035043
)
(
裸芯片
)
• 506
吸嘴(
40001344
)
8-1-3 操作
从菜单中选择“贴片参数”-“元件计测速度”后,会显示如下对话框。
JM-100为了防止模具吸嘴与相邻贴片头发生碰触,对各个奇数/偶数贴片头取得偏移量。
8-1