KE2000R_机器控制参数.pdf - 第102页
R e v 1 . 0 0 机械控制参数 输入范围 № 项目 最小值 最大值 单 位 备考 8 Y 分割数的最大元件外形尺 寸 0.1 μm 初期值 标准测定方式 0° :1000000, 0 , 0 , 0 90° :260000, 500000,0,0 180°:1000000, 0 , 0 , 0 270°:260000, 500000,0,0 高精度测定方式 0 ° :500000,0,0, 0 90° :260000, 500…
Rev1.00
机械控制参数
输入范围
项目
最小 值
单
备考 №
值 最大
位
5 軸加速距離
μm
初期值
度测定方式
0.1
标准测定方式
:30000(3mm),
高精
:5000(0.5mm)
6
轴速度静止距离
(加速距离通过后速度稳定
的距离)
0.1
μm
式
初期值
标准测定方式
:20000(2mm),
高精度测定方
:45000(4.5mm)
7
标准测定方式、
高精度测定方式
X分割数的最大元件外形尺
寸
0.1
μm
值
0° :260000,
500000,0,0
0,
0,0,0
80°:260000,
00000,0,0
,0
500000,0,0
270
°:500000,0,0,0
初期
标准测定方式
90° :100000
1
5
270°:1000000,
0,0,0
高精度测定方式
0° :260000,
500000,0,0
90° :500000,0,0
180°:260000,
4-56
Rev1.00
机械控制参数
输入范围
№ 项目
最小值 最大值
单
位
备考
8
Y分割数的最大元件外形尺
寸
0.1
μm
初期值
标准测定方式
0° :1000000,
0,0,0
90° :260000,
500000,0,0
180°:1000000,
0,0,0
270°:260000,
500000,0,0
高精度测定方式
0
° :500000,0,0,
0
90° :260000,
500000,0,0
180°:500000,0,0
,0
270°:260000,
500000,0,0
9 XY 卸载(ms) ms
10 Z 卸载时间(ms) ms
11 θ卸载时间(ms) ms
12 ms 初期值:3000 方式变换时间(ms)
13 分割间距
0.1
μm
初期值:250000
(25mm)
14
测定标记距离
(扫描距离=元件外形+标
记×2)
0.1
μm
初期值:30000
(3mm)
注) 变更了設置方向之后,按照角度的机械控制参数初期化的确认信息被显示出来,选择了[OK]按键之
后,进行初期化。
4-57
Rev1.00
机械控制参数
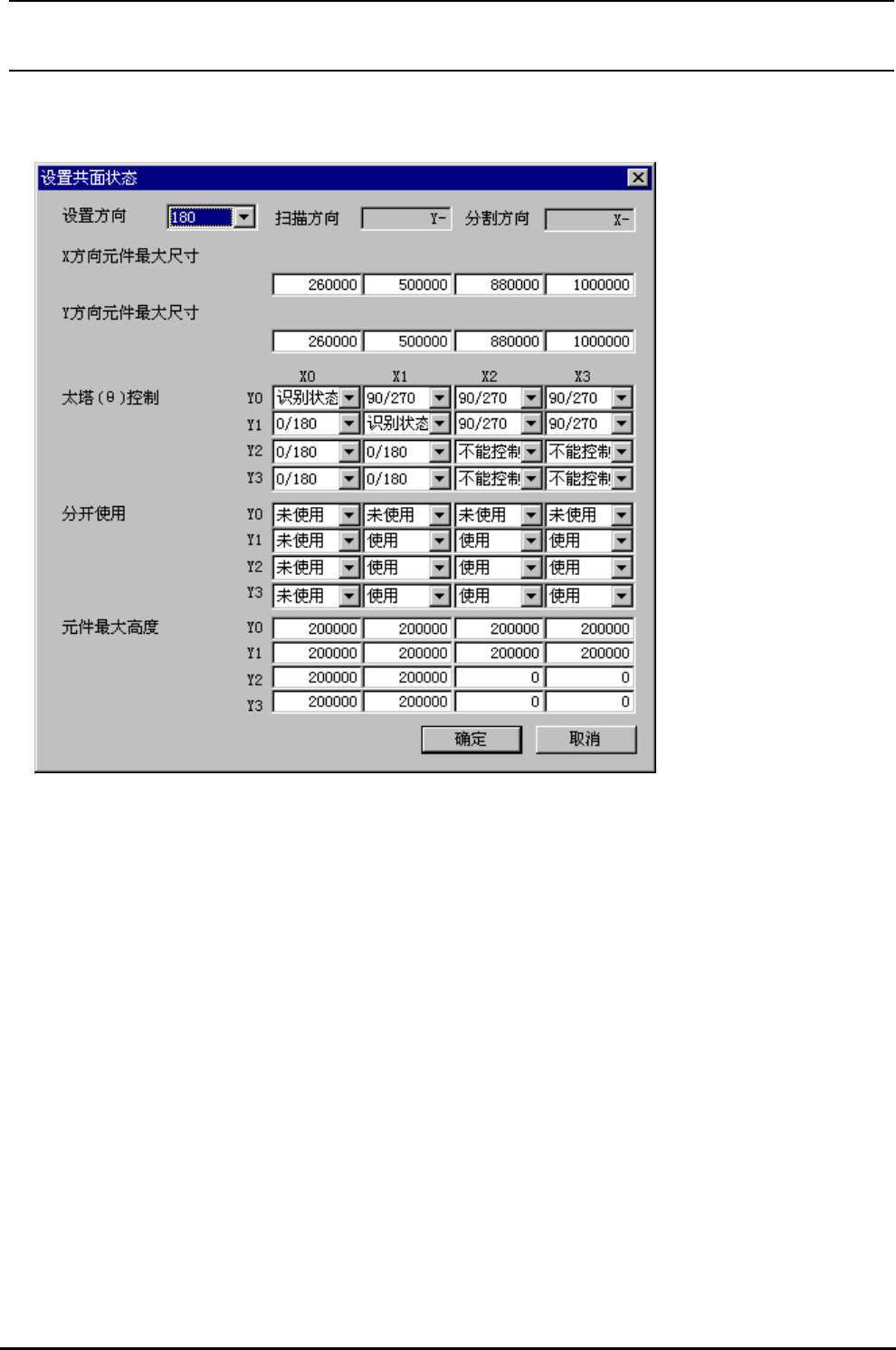
4-4-7 共面性状态控制的设定
图 4-4-7 共面性状态控制的设定
(1)设定画面的显示方法
菜单∶ [输入]→[图像]→[共面]→[设置状态控制]
起动∶ [图像]按键→[共面]标签→[设置状态控制]按键
4-58