KE2000R_机器控制参数.pdf - 第77页
R e v 1 . 0 0 机械控制参数 4-2-3 PTP 以外动作的轴控制参数和结束触发 ( 主数据 ) 图 4-2-3 PTP 以外动作的轴控制参数和结束触发 ( 主数据 ) (1) 设定画面的显示方法 菜单∶ X 时, [ 输入 ]→[XY]→[X]→[PTP 以外 ]→[ 主 ] 时, [ 输入 ]→[XY]→[Y]→[PTP 以外 ]→[ 主 ] 起动∶ X 时, [ X Y b→[ 主要数据 ] 按键 Y 时, [ X Y…
Rev1.00
机械控制参数
(3)速度
内 容
类别
№ 类别
1 高速 0
2 1 中速
3 2 低速
4 3 超低速
5 4 超高速
(4)行程类别
№ 类别 内 容
1 0 s <= 1mm
2 1 1mm < s <= 2mm
3 2 2mm < s <= 4mm
4 3 4mm < s <= 10mm
5 4 10mm < s <= 20mm
6 5 20mm < s <= 40mm
7 6 40mm < s <= 70mm
8 7 70mm < s <= 110mm
9 8 110mm < s <= 160mm
10 9 预备
(5)增益类别
№ 类别 内 容
1 0 基本增益
2 1 扩展增益
4-31
Rev1.00
机械控制参数
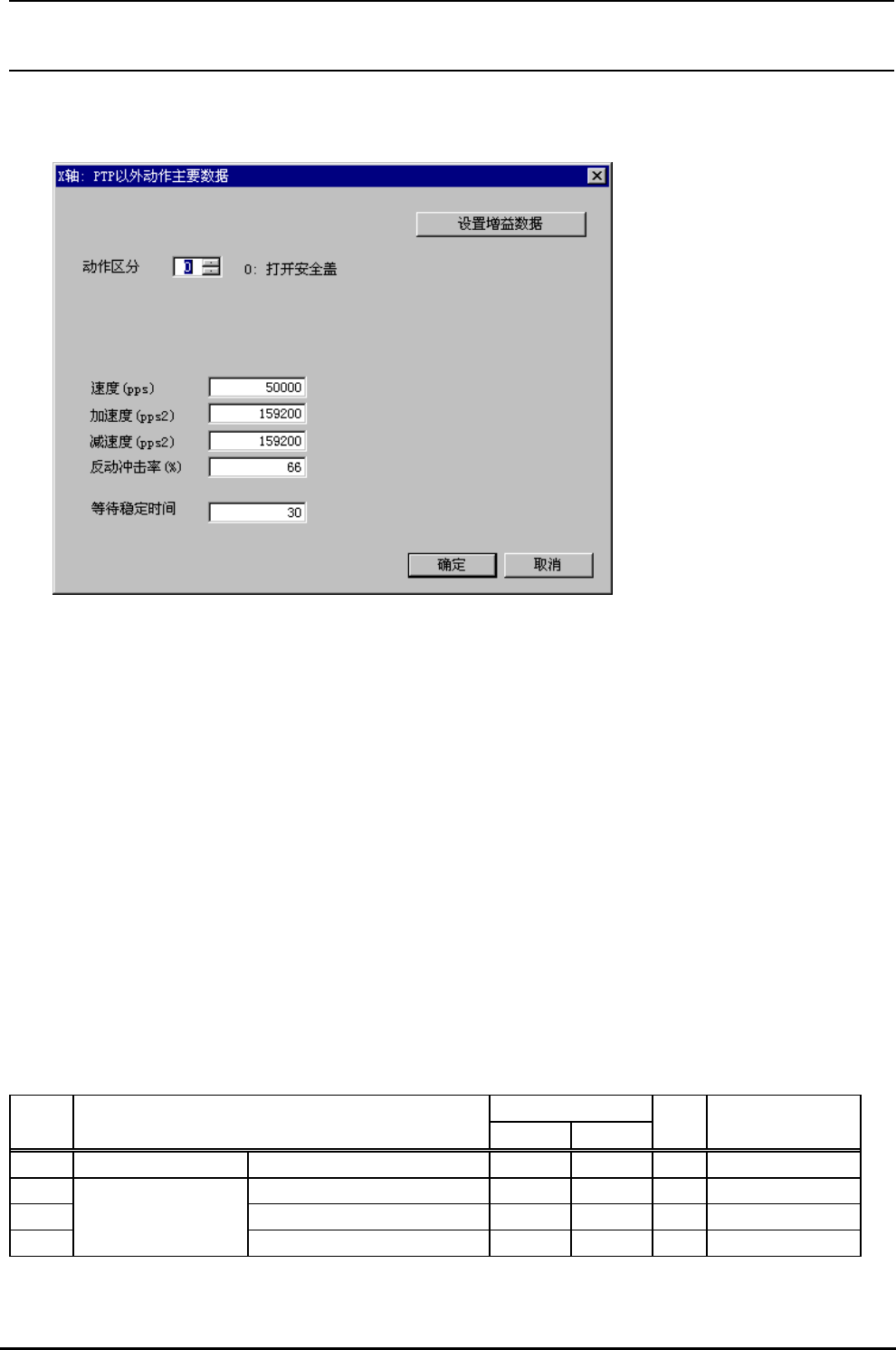
4-2-3 PTP 以外动作的轴控制参数和结束触发(主数据)
图 4-2-3 PTP 以外动作的轴控制参数和结束触发(主数据)
(1)设定画面的显示方法
菜单∶ X时, [输入]→[XY]→[X]→[PTP 以外]→[主]
时, [输入]→[XY]→[Y]→[PTP 以外]→[主]
起动∶ X时, [XY b→[主要数据]按键
Y时, [XY]按键→[Y]Tab→[PTP 以外]Tab→[主要数据]按键
∶ [设置主要数据]按键
注 4-2-4)被显示出来。此时,在现在显示的动
作区
注 据]按键。此时,使用[OK]按键
或[
(2)
输入范围
Y
]按键→[X]Tab→[PTP 以外]Ta
从增益数据设定画面(图 4-2-4)
1) 选择了[设置增益数据]按键之后,增益数据设定画面(图
分上显示出有关增益数据。
2) 从增益数据设定画面(图 4-2-4)显示出本画面后,不显示[设置增益数
取消]按键结束本画面之后,返回增益数据设定画面。
设定项目(X轴、Y轴通用)
№ 项目
最小值 最大值
单
位
备考
1 动作区分 0 14 参照(3)动作区分
2 速度(pps) pps
3 加速度(pps2) pps
2
4
减速度(pps2) pps
2
PTP 以外的动作
(轴控制参数)
4-32
Rev1.00
机械控制参数
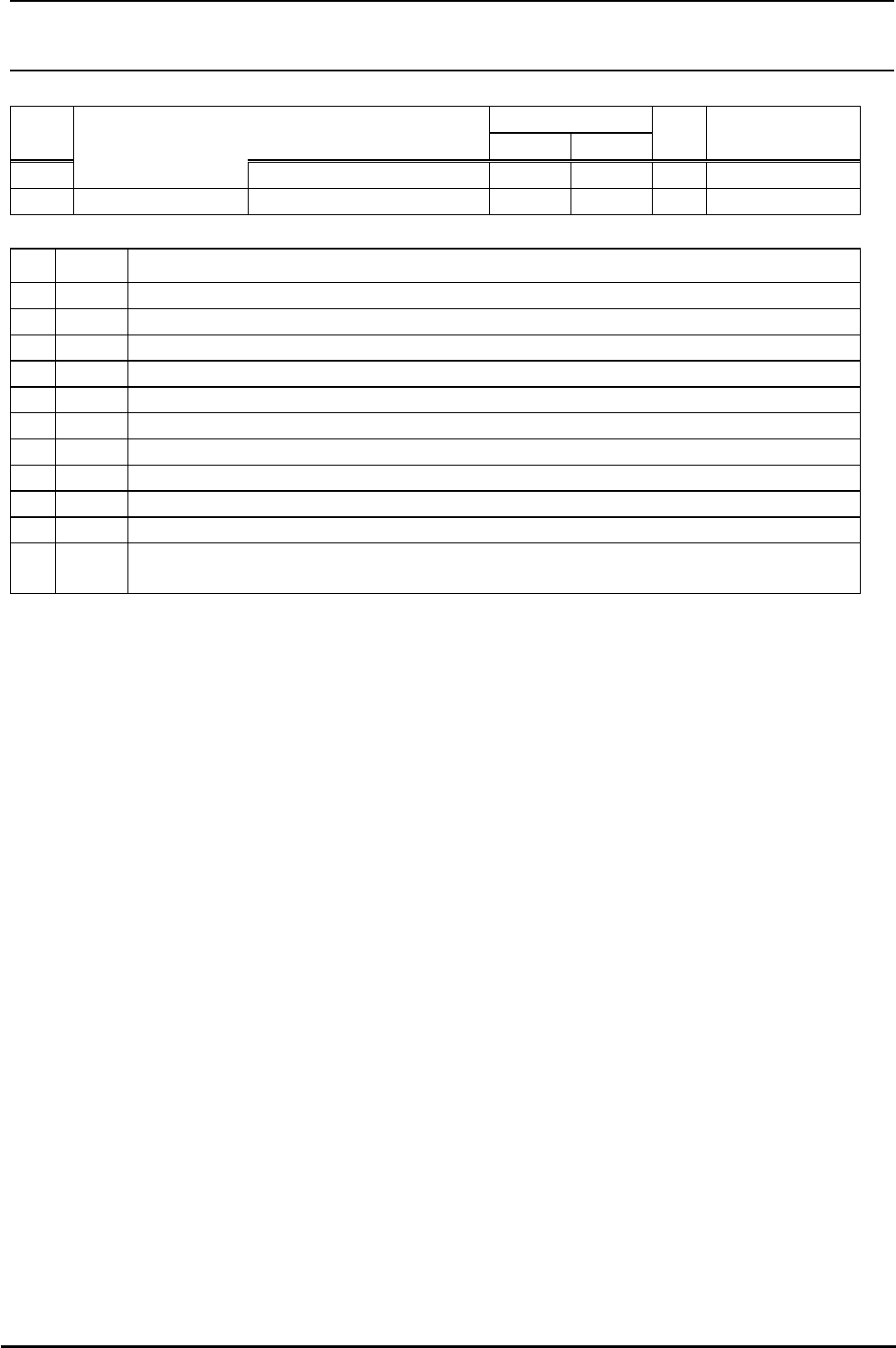
输入范围
项目
最小 值
单
备考 №
值 最大
位
5
(%) 0∼10反动冲击率 % 0
6 完了触发 ms
(3)
№ 类别 内
动作类别
容
1 0 打开 护罩
2 1 返回原点 HOM E 传感器检索
3 2 返回原点 HOM E 传感器捕获
4 3 低速 STEP(演示 )
5 4 高速 STEP(演示 )
6 5 低速 JOG(演示 )
7 6 高速 JOG(演示)
8 7 共面低速扫描
9 8 共面高速扫描
1 9 共面分割移动0
11
10
14
∼
预备
4-33