SIPLACE Vision Customer_en.pdf - 第140页
SIPLACE Vision - Teaching Fiducials Fiducial shapes Sample Fiducials for Position Recognition S tudent Guide SIPLACE V ision (Customer) SIPLACE Vision - T eaching Fiducials Edition 12/2008 EN 140 The effect on fine cente…
SIPLACE Vision - Teaching Fiducials
Synthetic Fiducials for Position Recognition Applications Fiducial shapes
Student Guide SIPLACE Vision (Customer)
Edition 12/2008 EN SIPLACE Vision - Teaching Fiducials
139
With Subsampling the system combines a number of point pairs to one evaluation point or a so-called
moxel. The number indicates how many points are summarized on each page to facilitate faster
calculation. The fine structure (extremely thin bar widths) setsthis parameter to its standard value.
The Distance between points is set to the respective default value through the tolerance setting for the
fine structures.
This changes the distance between the points for the light foreground and dark background.
6-8: Minimum difference in contrast
Minimum contrast is set to ’20’ as a default,
meaning that a contrast difference between purple
and blue in the pseudo colors image is enough for
that structure to be recognized as a possible
fiducial contour. (concealed fiducial (blue) 39-55 /
background purple 15-20)
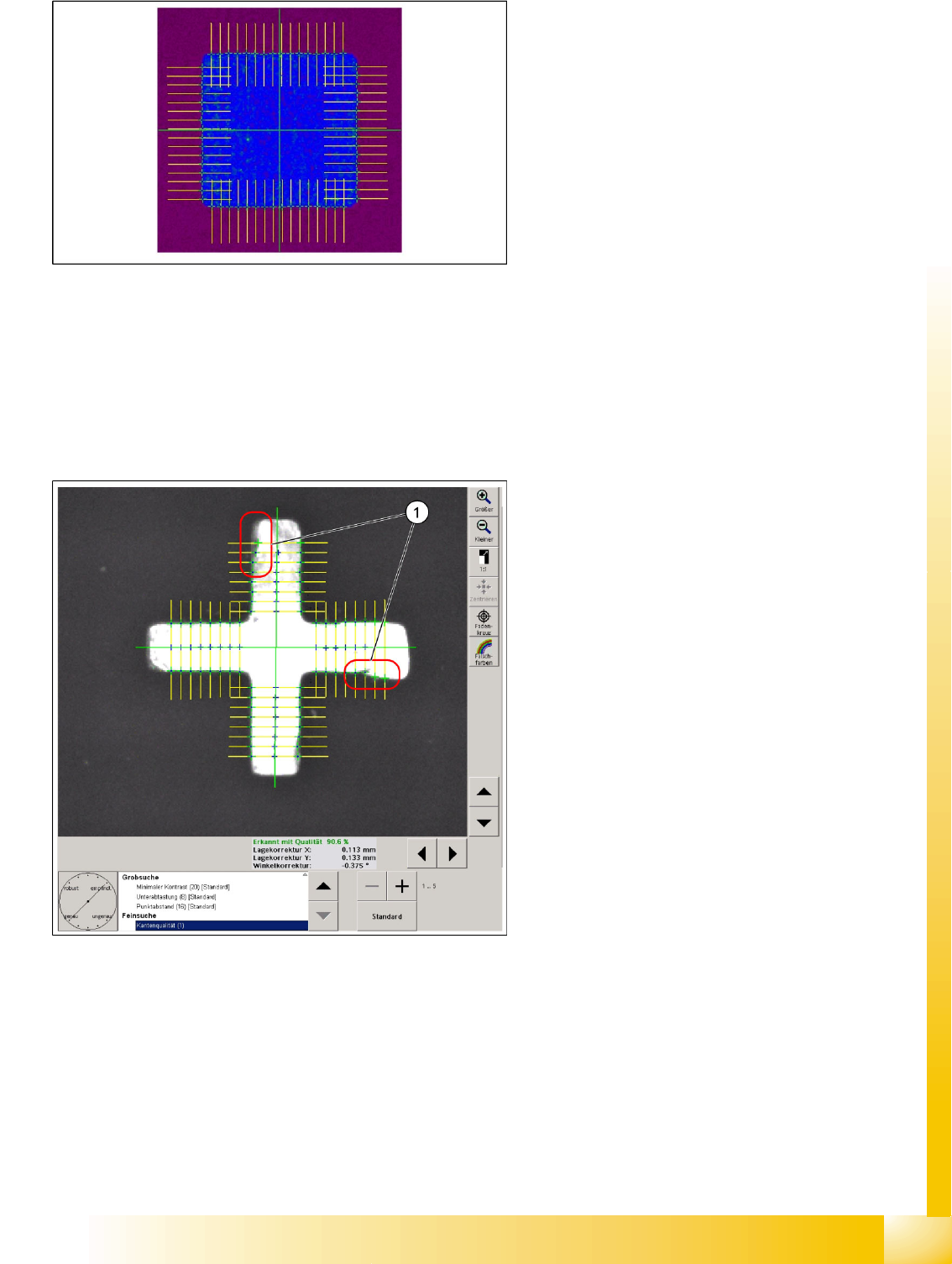
6-9: Fine search step for cross fiducial
Edge quality
The edge quality value for many interfering
structures can be set from 2 (default value) to 1.
this means that the edge is determined more
precisely. This also means that interfering
structures on the edge influence the measuring
result, since the permitted tolerance is very low.
If interference can be detected on the fiducial edge
(1), this parameter can be set to a value of 5. This
robust measurement method determines the edge
positions for the fine search with a greater
permitted tolerance or without checking (value 5)
the tolerance value for the edge position. (This
should be shown by the parameter ’Robust’ –
"Inaccurate".)
SIPLACE Vision - Teaching Fiducials
Fiducial shapes Sample Fiducials for Position Recognition
Student Guide SIPLACE Vision (Customer)
SIPLACE Vision - Teaching Fiducials Edition 12/2008 EN
140
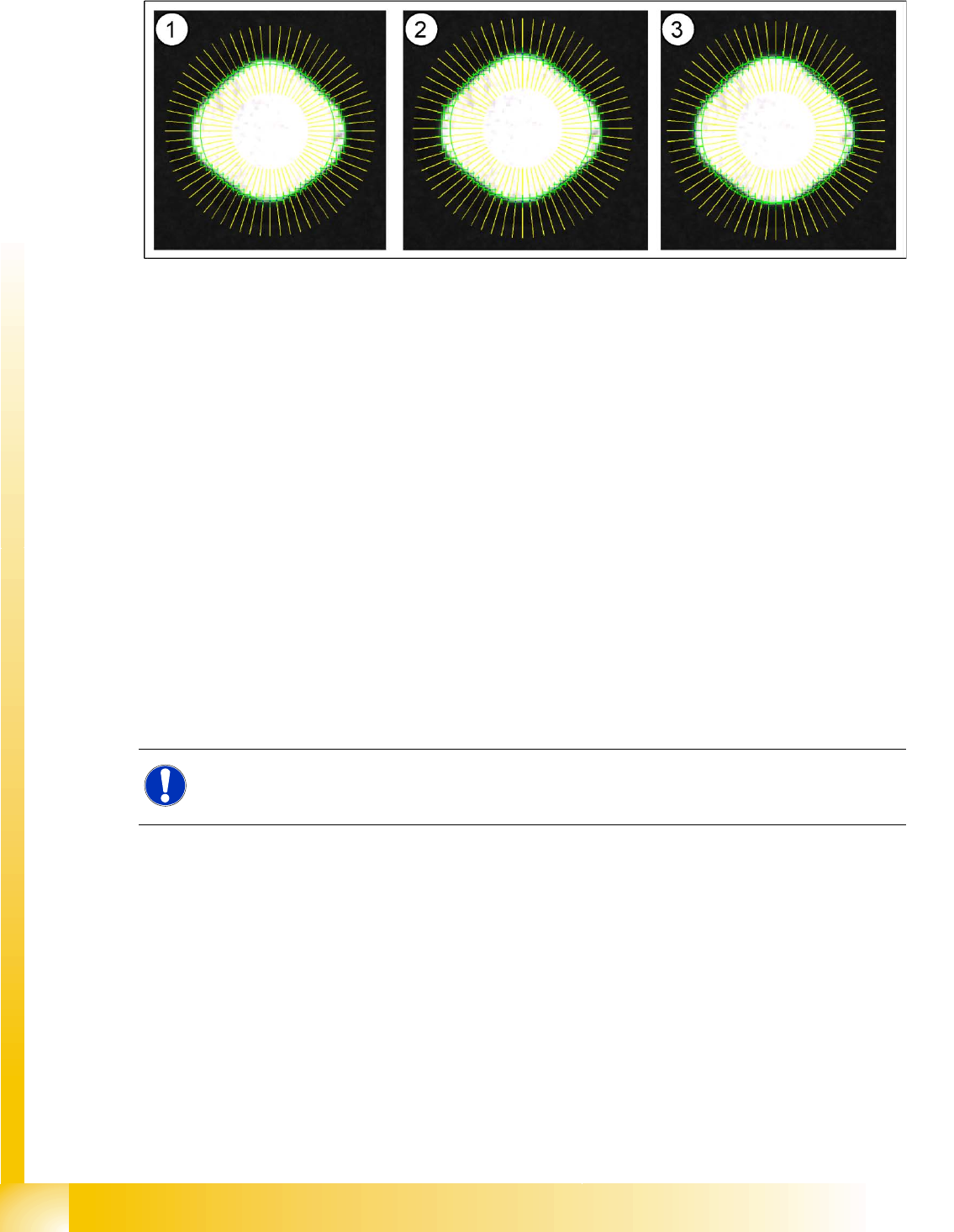
The effect on fine centering can be shown on an ellipsoid, programmed as a circle. The edge quality is
changed from left to right, from a value of 1 to 3.
Legend
1. Edge quality 1: 22 scan lines not in tolerance range.
2. Edge quality 2: 16 scan lines not in tolerance range.
3. Edge quality 3: all scan lines OK
As can be seen in the diagrams, the circle diameter recognized is larger due to the higher permitted
tolerances (clearly seen in the differences between diagrams 2 and 3).
6.2.2 Sample Fiducials for Position Recognition
The sample fiducials are learnt interactively by the system, during programming. The following
procedures are performed:
The evaluation area for the fiducial shape is defined by the operating personnel.
The fiducial reference point (usually the fiducial center point) is searched for by the Vision system.
If the fiducial reference point can not be found or if the coordinates defined for the fiducial shape are
unusual, the operator can click to define the fiducial reference point manually and then let the system
learn the fiducial shape.
The parameters and coordinates learnt by the Vision system can NOT be subsequently manually
changed. In this case, the fiducial has to be retrained (repeat procedure).
NOTE:
Sample fiducials do not support the function for rotating the PC orientation in the placement
recipe.
SIPLACE Vision - Teaching Fiducials
Sample Fiducials for Position Recognition Fiducial shapes
Student Guide SIPLACE Vision (Customer)
Edition 12/2008 EN SIPLACE Vision - Teaching Fiducials
141
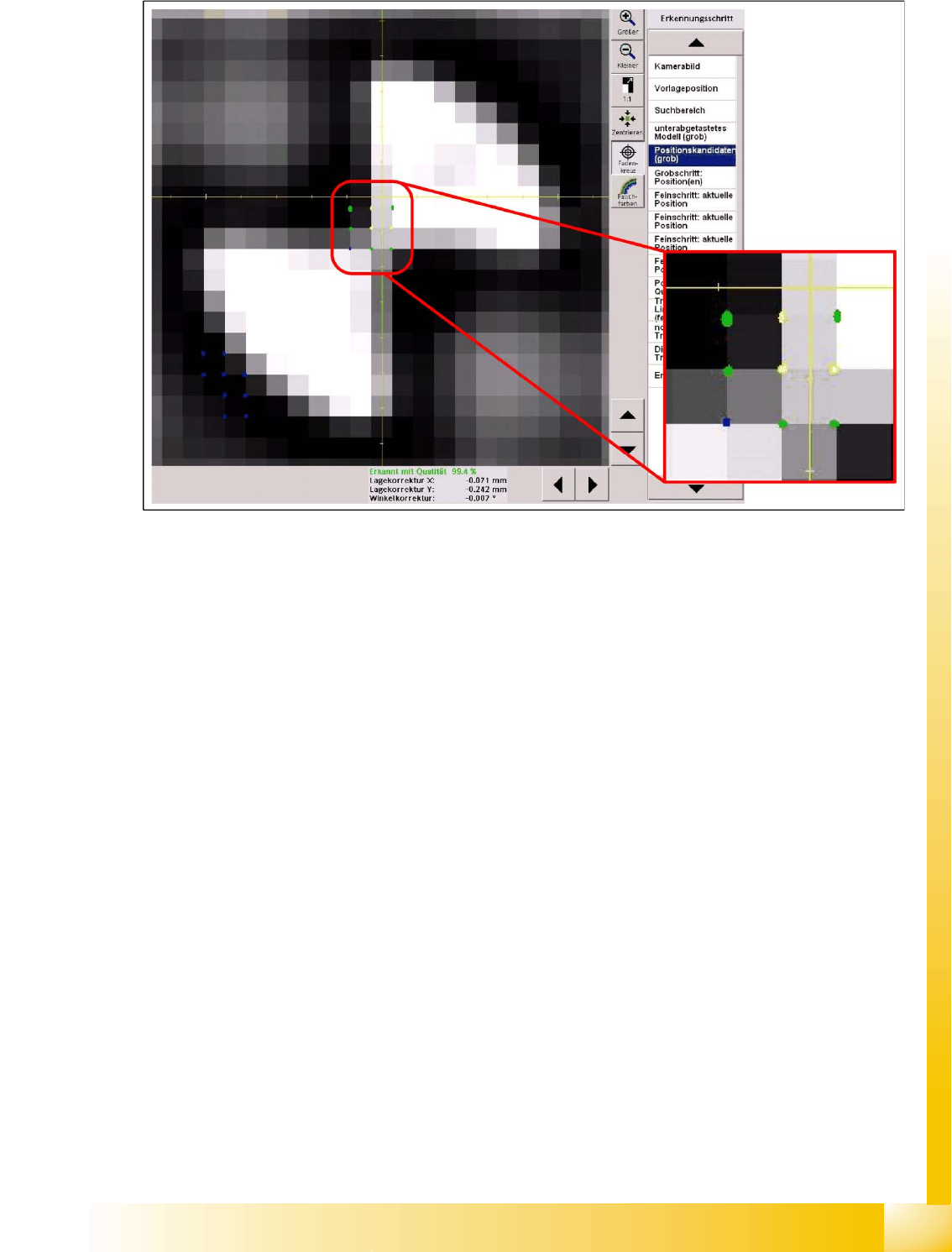
6.2.2.1 Position Candidates
6-10: Coarse position candidates
The yellow dots show positions for which a coarse pattern matches very well.
The green dots show positions for which the coarse pattern matches well.
The blue dots show points with relatively low matching.
The high match positions will be evaluated first during the next centering steps.
2 fine searches are performed with the points which have been combined to form "moxels". This is then
followed by 2 fine searches with high resolution (one search for the dark outer edge and one search for
the light inner edge).