JUKYX-193-5100_G5S2.pdf - 第145页
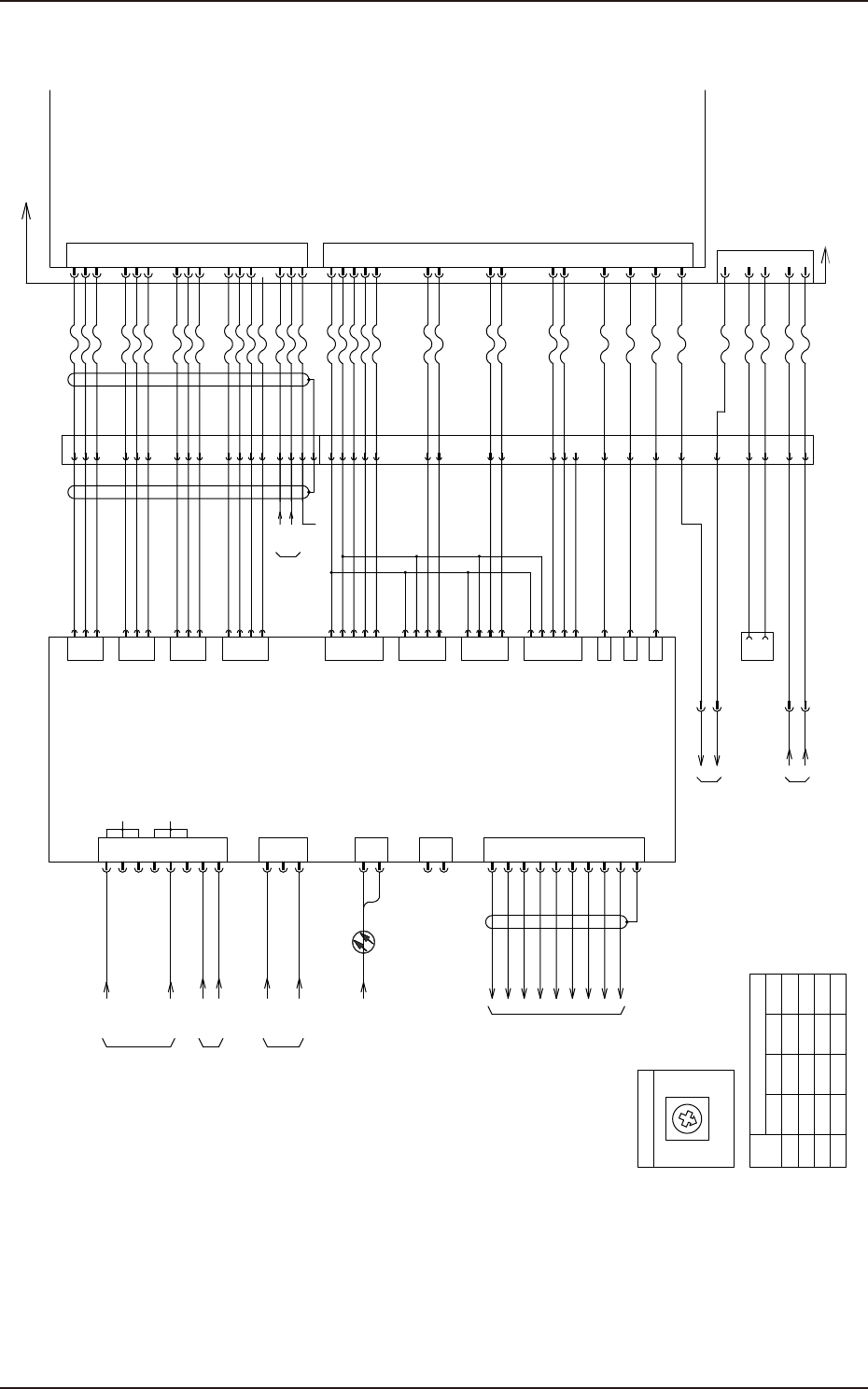
193-5100 JUKYX 4-29 CN1 A1 A2 A3 A4 A5 A6 A7 A8 A9 A10 B1 B2 B3 B4 B5 B6 B7 B8 B9 B10 U_4 V_4 W_4 SHD 10 (GND) 24A6 (24V) F. G B1_3 B2_3 B1_4 U_3 V_3 W_3 U_…
193-5100
JUKYX
4-28
A31F
Servo Motor AMP
1
3
5
7
2
4
6
8
13
PA1
PAR1
PB1
PBR1
PA4
PAR4
PB4
PBR4
PG5
CN5
16
:A1
P2A
B12BU
:A2
1AV
:A3
2AW
:B1
U
:B2
V
:B3
W
:A8
U
:A9
V
:A10
W
:B8
2BU
:B9
1AV
:B10
2BW
:A5
:A6
:A7
:1
2A
A4P5
:2
B4P5G
:3
A1MR1
:4
B1MRR1
:5
B5BAT
A4
B4
:6
A1
:7
B1
:8
:9
:10
:11
:13
4NS_ORGN
:14
3HL_OR-/L2_OR-
:15
3L1_OR-
:B7
A4
B4
A1
B1
A4
B4
A1
B1
:Case
B1
X31P2AF
X31P2BF
X31P2CF
X31P2DF
P2B
P2C
P2D
P5
P5G
MR1
MRR1
P5
P5G
MR1
MRR1
P5
P5G
MR1
MRR1
Shield
X312AF
X312BF
X312CF
X312DF
B2
B3
B8
B9
B10
A8
A9
A10
A1
A2
A3
A5
A6
A7
1
2
3
6
7
8
9
10
11
17
18
19
4
5
1BE A4
2B
1A
2A
2B
1A
2A
2B
2C
2D
:12
16
:20
:21
:22
:23
:24
1
2
3
4
5
HEAD2
X314BF
X314CF
X314DF
CN1
CN2
X0701
X0702
XH
1
2
N.C
NL_INLK
IH_ERROR
IH_TH-
IH_TH+
IH_LIGHT_OFF
IH_ZERO_SHIFT
X131P2
X10702H2
XBHF
:A4
10
24A6
FG
[B-/02/7D]
24A6
1A
1B
2A
4B
5A
5B
6A
6B
P48M
P24M
P24G
10
48D
X31P1F
10
P48G
1
2
X311A
CN1A
CNP1
X3105F
SSCNET3
(IN)
1
2
CN1B
SSCNET3
(OUT)
[B-/03/7B]
from U27-CN12
[B-/02/7C]
from U27-CN12
[C-/03/1C]
from A31B CN1B
[D-/10/7C]
to U02-CN3F
Robot Cable
[D-/11/6D]
to U02-CN6F
[D-/11/6F]
from U02-CN7F
X10206F:2
:1
:2
X10207F:1
1
2
X3103F
CN3
3
DICOM
DOCOM
10
[B-/02/7D]
from DC Terminal
24A6
U07
Connector PCB
CN*A
1
5
9
13
Address
CN*B
2
6
10
14
CN*C
3
7
11
15
CN*D
4
8
12
16
RSW
0
1
2
3
8
7
6
5
4
3
2
1
0
F
E
D
C
B
A
9
A31F Setting Value
RSW:1
KYX-000-CC-013
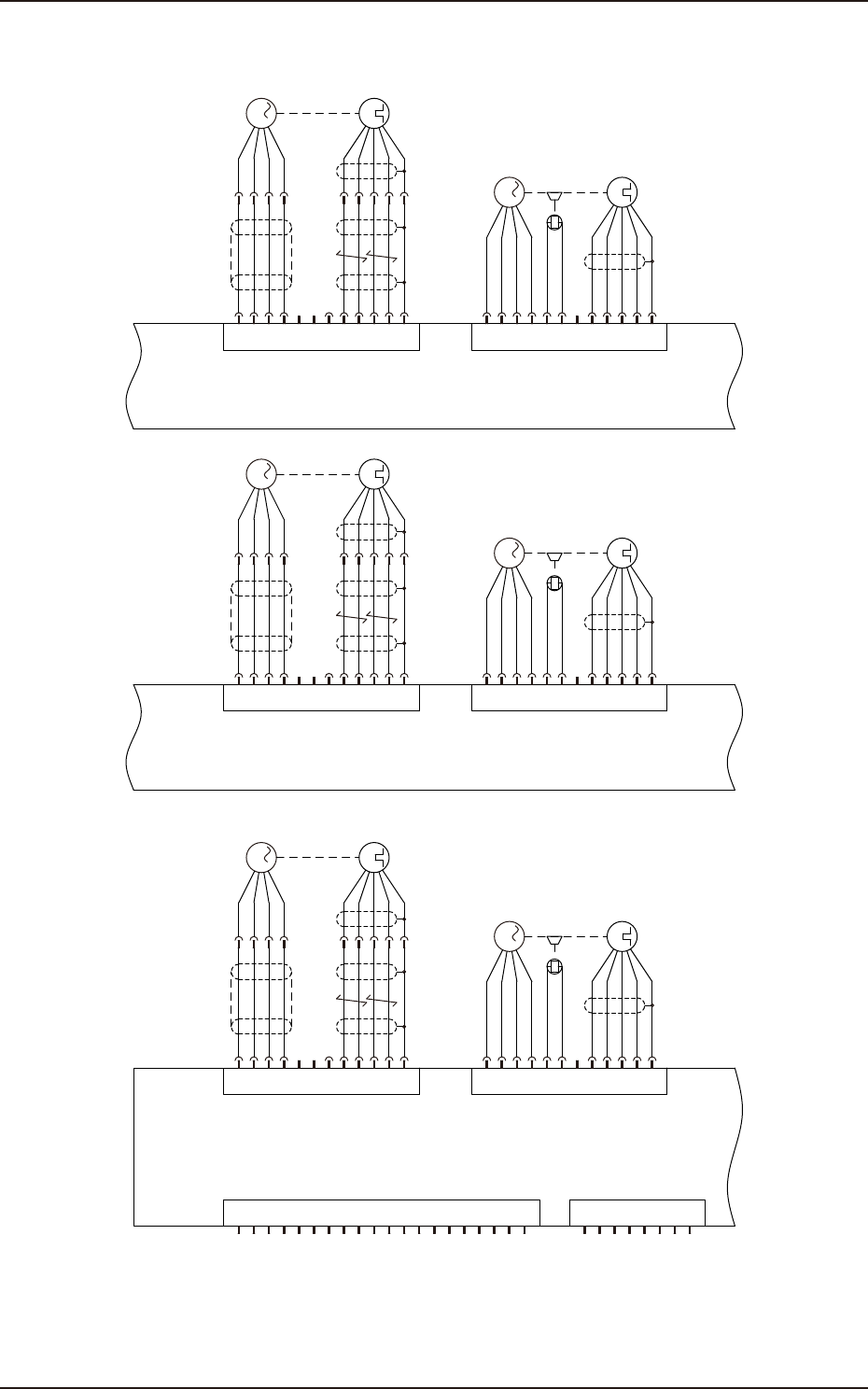
193-5100
JUKYX
4-29
CN1
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
B1
B2
B3
B4
B5
B6
B7
B8
B9
B10
U_4
V_4
W_4
SHD
10 (GND)
24A6 (24V)
F.G
B1_3
B2_3
B1_4
U_3
V_3
W_3
U_1
V_1
W_1
U_2
V_2
W_2
B2
A1
A2
B1
A5
B5
A3
B3
A6
A4
B6
CN3
M
3
B4
U_1
F.G
V_1
W_1
MR_1
MRR_1
SHD
SSG
M141-1
P5G
P5
Robot Cable
U07D
Connector PCB
Robot Cable
B2
A1
A2
B1
A5
B5
A3
B3
A6
A4
B6
CN4
M
3
B4
U_4
F.G
V_4
W_4
MR_4
MRR_4
SHD
SSG
M142-1
P5G
P5
U07D
Connector PCB
B2
A1
A2
B1
A5
B5
A3
B3
A6
A4
B6
CN22
M
3
B4
U_5
F.G
V_5
W_5
MR_5
MRR_5
SHD
SSG
M141-3
P5G
P5
Robot Cable
Robot Cable
B2
A1
A2
B1
A5
B5
A3
B3
A6
A4
B6
CN23
M
3
B4
U_6
F.G
V_6
W_6
MR_6
MRR_6
SHD
SSG
M142-3
P5G
P5
:3
:4
:5
:2
:1
:3
:4
:5
:2
:1
:3
:4
:2
:1
:3
:4
:2
:1
U07D
Connector PCB
B2
A1
A2
B1
A5
B5
A3
B3
A6
A4
B6
CN6
M
3
B4
U_4
F.G
V_4
W_4
MR_4
MRR_4
SHD
SSG
M141-2
P5G
P5
Robot Cable
Robot Cable
B2
A1
A2
B1
A5
B5
A3
B3
A6
A4
B6
CN5
M
3
B4
U_3
F.G
V_3
W_3
MR_3
MRR_3
SHD
SSG
M142-2
P5G
P5
:3
:4
:5
:2
:1
:3
:4
:2
:1
CR
CR
CR
B2_4
CN1
A1
A2
A3
A4
B1
B2
B3
B4
U_5
V_5
W_5
B1_6
U_6
V_6
W_6
B2_6
X0701
1Z Axis
1L Axis
3Z Axis
3L Axis
M141P
M141
M141P
M141
X0703
X0704
X0722
X0723
2Z Axis
2L Axis
M141P
M141
X0706
X0705
X0721
KYX-000-CC-081-1
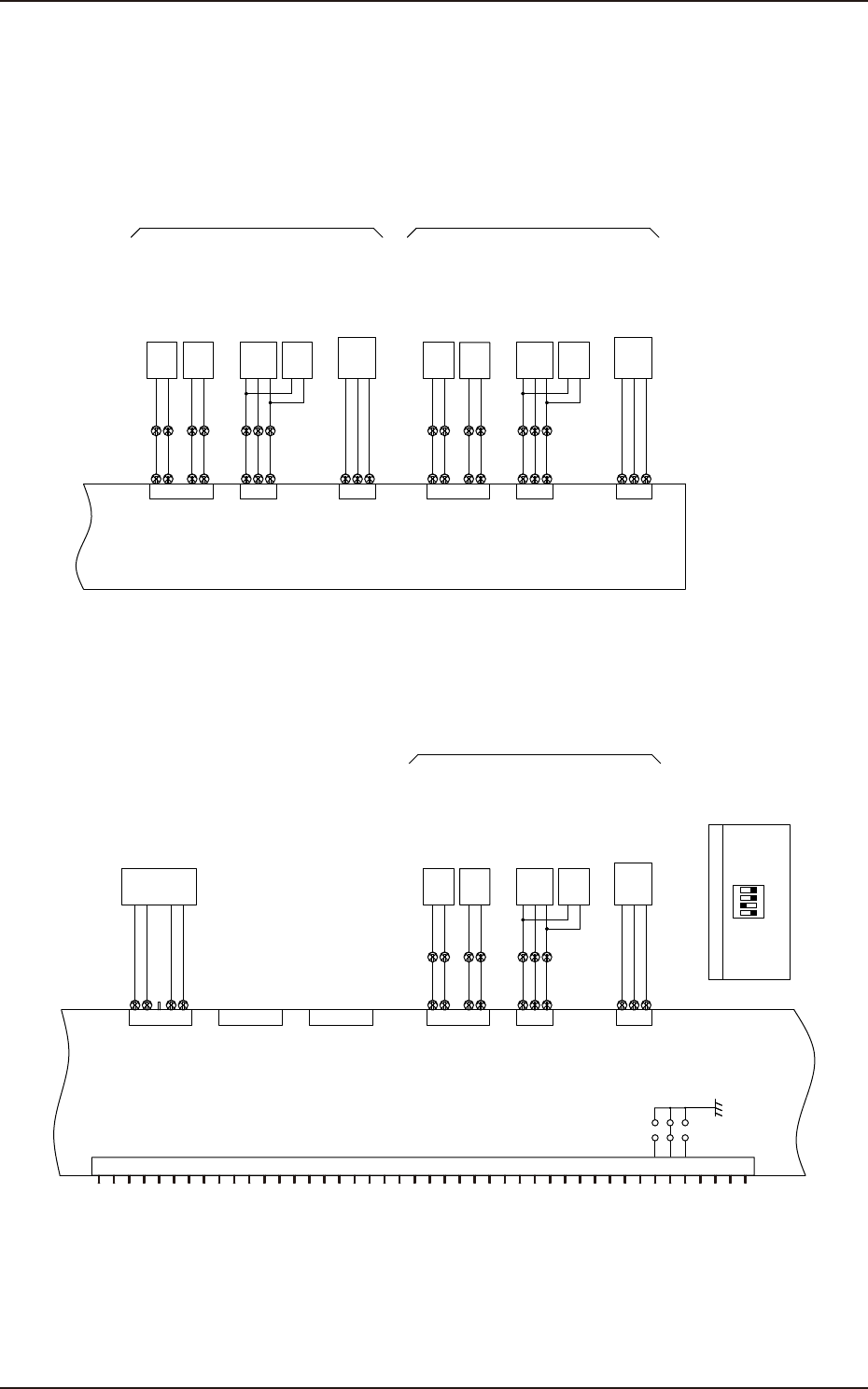
193-5100
JUKYX
4-30
1
2
CN9
1
2
3
CN10
1
2
3
CN11
CN12
1
2
3
CN13
1
2
3
CN14
U07D
Connector PCB
GND
OUT1
+V
B143-1(R)
B144-1
3
GND
+V
Y145-1
4
GND
+V
Y146-1
1
2
3
4
B143-1(T)
GND
+V
GND
+V
GND
OUT1
+V
+
-
+
OUT
-
+
-
+
OUT
-
GND
+24V
L2_OR-
GND
+24V
L2_H_SENS
GND
+24V
L1_OR-
GND
+24V
L1_H_SENS
L2_VAC
L2_VAC_BRK
+24V
+24V
L1_VAC
L1_VAC_BRK
+24V
+24V
:1
:2
:3
:1
:2
:3
:1
:2
:1
:2
:4
:3
:4
:3
CN2
1
2
3
4
5
6
7
8
9
10
11
17
18
19
12
13
14
15
20
21
22
23
24
25
26
27
28
29
31
32
33
34
35
36
37
38
39
30
40
41
42
43
44
MRR_1
P5G_1
MR_1
P5_1
MRR_2
MR_2
MRR_3
MR_3
MRR_4
MR_4
U07D
Connector PCB
L1_FLOW_3
L2_FLOW_1
L2_FLOW_2
L2_FLOW_3
L3_FLOW_1
L1_H_SENS
L1_VAC
L1_VAC_BRK
L2_VAC
L2_VAC_BRK
L3_VAC
L3_VAC_BRK
CN15
1
2
3
CN16
1
2
3
CN17
1
2
3
4
GND
+V
GND
+V
GND
OUT1
+V
+
-
+
OUT
-
GND
+24V
L3_OR-
GND
+24V
L3_H_SENS
L3_VAC
L3_VAC_BRK
+24V
+24V
:1
:2
:3
:1
:2
:4
:3
CN19
1
2
4
5
GND
L1_FLOW_1(OUT)
+24V
3
L1_FLOW_1(EXT IN)
L1_FLOW_2(OUT)
CN18
1
2
4
5
N301
GND
OUT
Parts fall detection
GND
L1_FLOW_1(OUT)
+24V
3
L1_FLOW_1(EXT IN)
L1_FLOW_2(OUT)
---
IN
+V
CN20
1
2
4
5
GND
L1_FLOW_1(OUT)
+24V
3
L1_FLOW_1(EXT IN)
L1_FLOW_2(OUT)
16
SW1_1
1 8
2 7
3 6
MRR_5
P5G_2
MR_5
P5_2
MRR_6
MR_6
L1_OR-
L2_OR-
L3_OR-
L2_H_SENS
L3_H_SENS
L1_FLOW_1
L1_FLOW_2
SW1_2
SW1_3
HEAD connection
(Light receiving side)
(Projected side)
Height detection
Height detection
1L Axis.
Overrun sensor
Vacuum break valve
Multifunction head
Nozzle 1 side
confirmation
Vacuum valve
1
ON
2 3 4
U07D Board SW1 Configuration
B143-2(R)
B144-2
Y145-2
Y146-2
B143-2(T)
(Light receiving side)
(Projected side)
Height detection
Height detection
2L Axis.
Overrun sensor
Vacuum break valve
Vacuum valve
B143-3(R)
B144-3
Y145-3
Y146-3
B143-3(T)
(Light receiving side)
(Projected side)
Height detection
Height detection
3L Axis.
Overrun sensor
Vacuum break valve
Vacuum valve
Multifunction head
Nozzle 2 side
Multifunction head
Nozzle 3 side
X0709
X0710
X0711
X0713
X0714
Y145
Y145X0712
B143
B143
X0702
X0716
X0717
Y145X0715
B143
X0718
L3_FLOW_3
L3_FLOW_2
KYX-000-CC-082-1