FX3_MSP_Rev1.0_C.pdf - 第20页
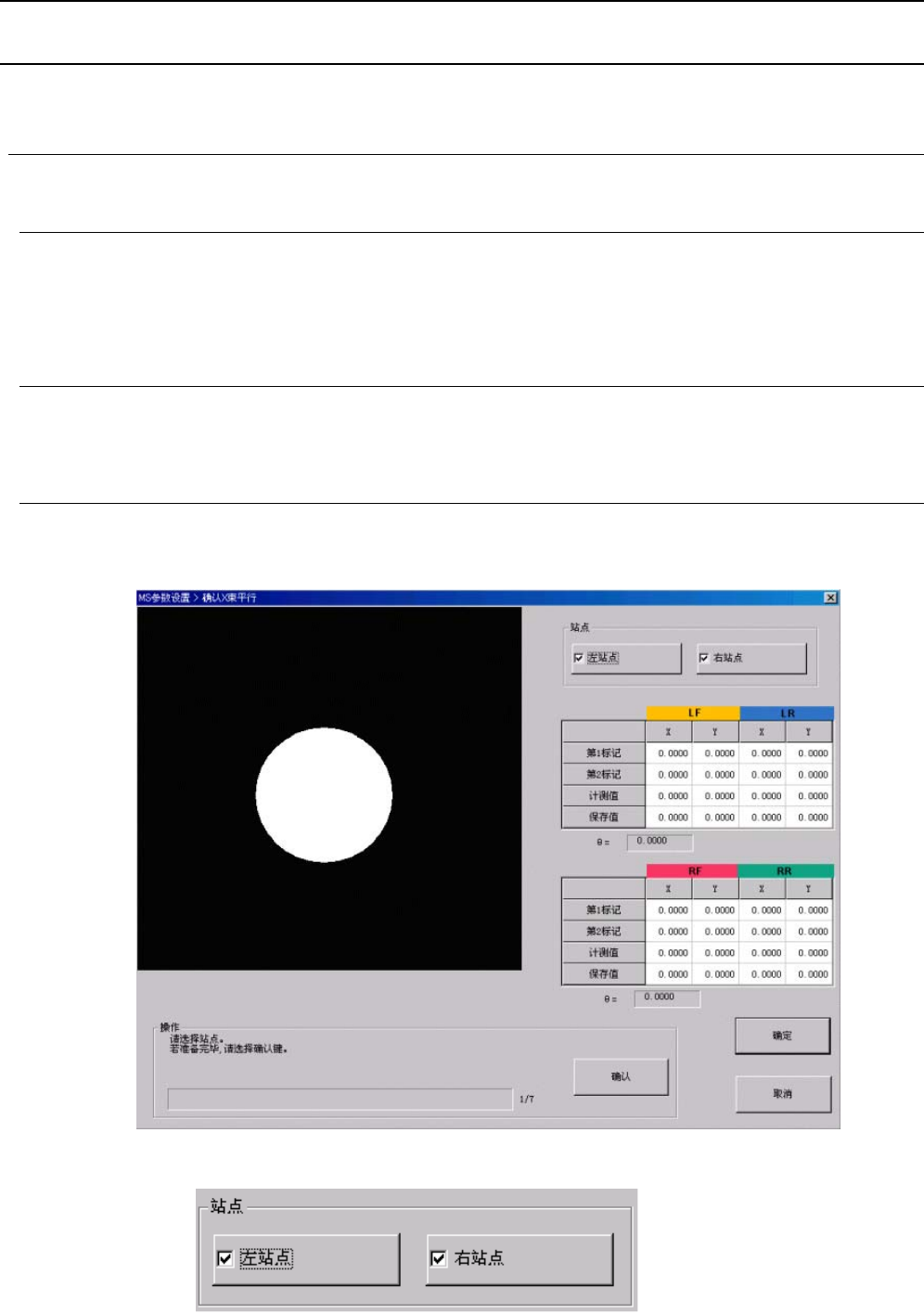
Rev1.00 MS 参数 2-7 2-5 确认 X 束平行 2-5-1 功能 算出第 1 共通标记与第 2 共通标记的 X 在 XY 方向上的偏移 量,作为偏移量值 。 算出各站点前后方的 X 激光束构 成的角度。 2-5-2 使用模具 本项目中不使用模具。 2-5-3 操作 ① 从菜单中选择 “ 初始设置( I ) ” - “ 确认 X 束平行( B ) ” ,会 显示如下对话框。请选择要确认的 站点,点击 “ 确认 ” 按钮。 选…
Rev1.00
MS 参数
2-6
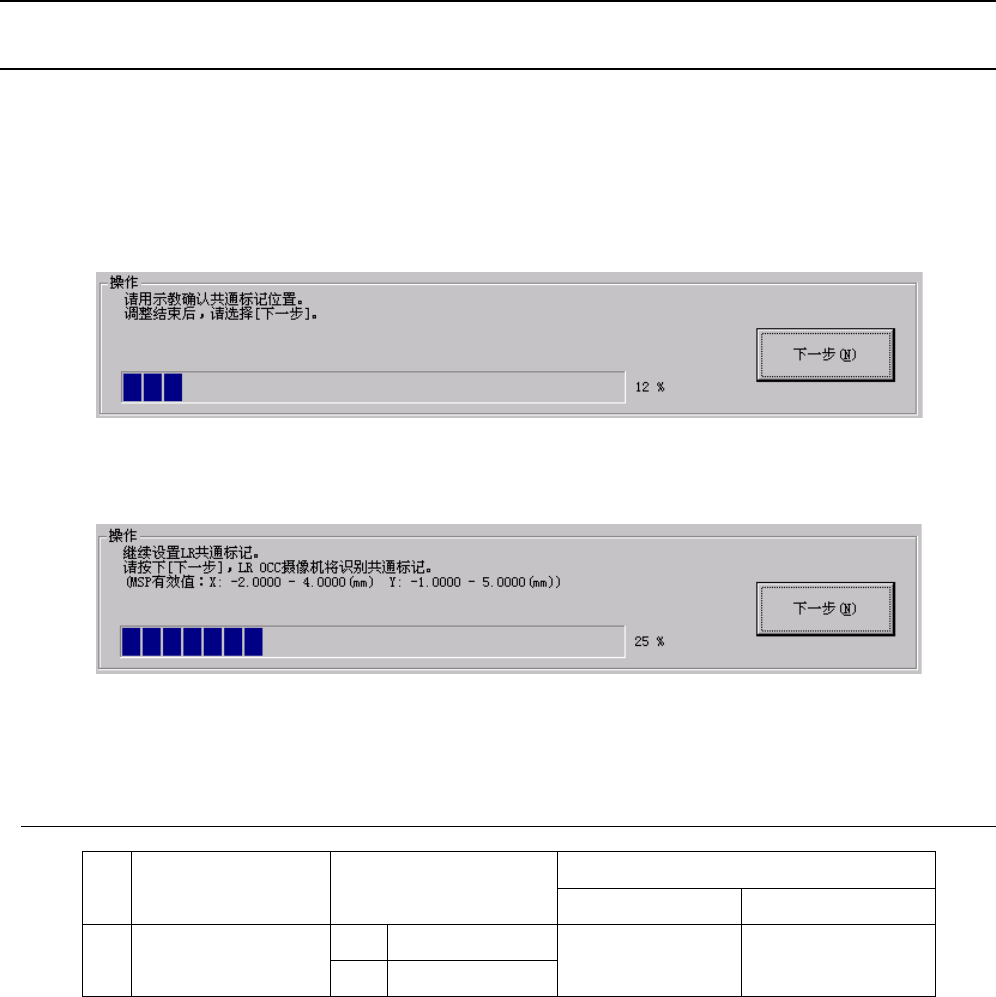
② 如选择“下一步”,则返回原点后,OCC移动到共通标记上,进行标记识别,根据识别的结果显
示出对设计值的偏移量。
当在标记的识别中发生错误时,清除偏移量的显示。
进行示教,使标记来到摄像机中心,选择“下一步”,识别共通标记。
③ 当识别正常完成,会显示如下对话框,如选择“下一步”,则回到初始画面。或者开始其他的设
备设置。
如选择“确定”退出对话框,则进行通常的返回原点。
2-4-4 MSP容许值
MSP值不良时
No. 项目 MSP容许值
出现的问题 调整(检测项目)
X −2.0~4.0㎜ 1 第1标记偏移量
Y −1.0~5.0㎜
返回原点不动作
Rev1.00
MS 参数
2-7
2-5 确认X束平行
2-5-1 功能
算出第1共通标记与第2共通标记的X在XY方向上的偏移量,作为偏移量值。
算出各站点前后方的X激光束构成的角度。
2-5-2 使用模具
本项目中不使用模具。
2-5-3 操作
① 从菜单中选择“初始设置(I)”-“确认X束平行(B)”,会显示如下对话框。请选择要确认的
站点,点击“确认”按钮。
选择站点。
Rev1.00
MS 参数
2-8
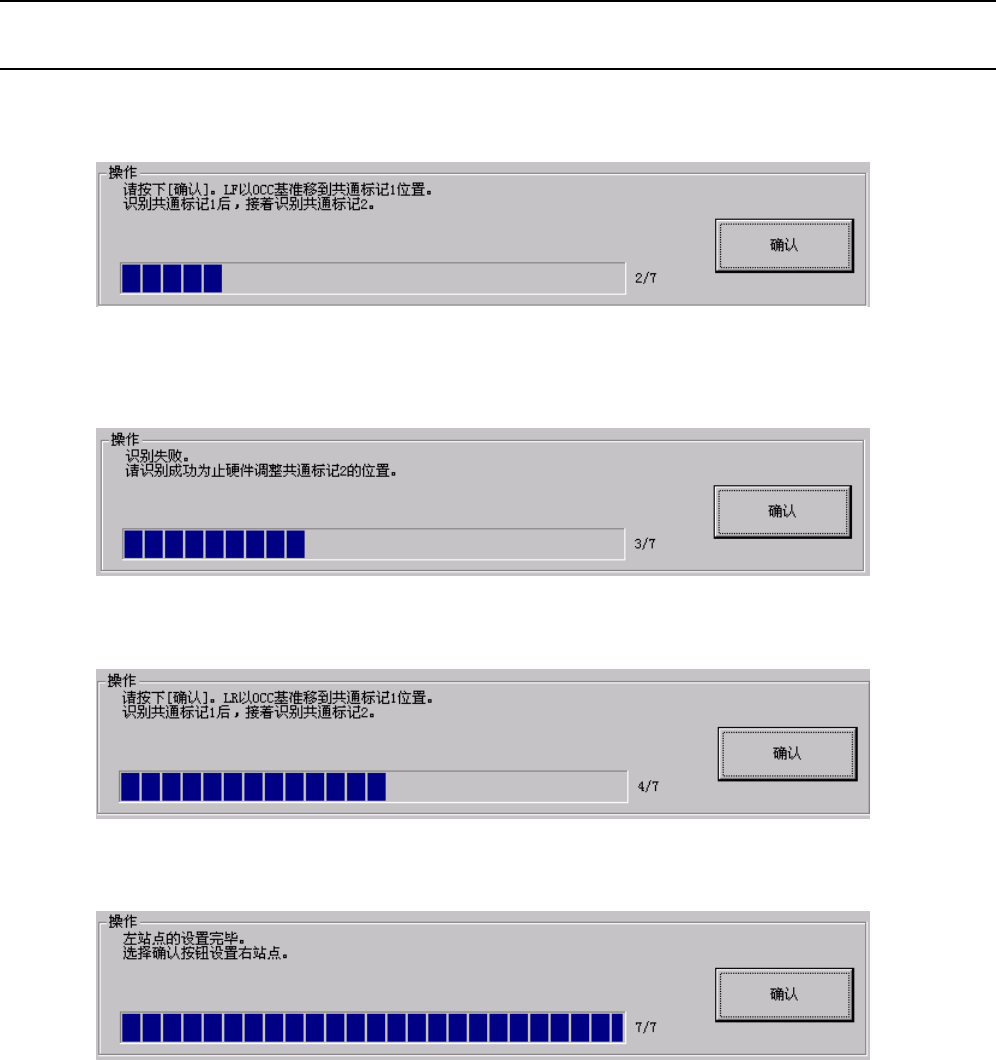
② 选择“确认”后,前侧的OCC先识别共通标记1,然后向共通标记2的位置移动。
③ 如发生识别错误,会在“操作”项目内显示如下所示的操作内容,为此进行示教,使共通标记
2来到摄像机的中心。
④ 后侧也依照操作说明进行同样的操作,根据其结果算出前与后的X束角度。
⑤ 将显示下面的操作内容,选择“确认”则回到初始画面。