FX-2_机器控制参数.pdf - 第125页
Rev1.0 机器控制参数 4-99 输入范围 № 项目 最小值 最大值 单位 备考 6 Y 轴转换等待稳定状态的 行程 0.1 μ m 初期值 :100000 (10mm) 7 芯片站立检查高度偏移量 0.1 μ m 初期值 :120 (0.012mm) 8 芯片站立判断高度计算 系 数 0 7 0: w>=0.45 1: 0.25<=w<0.45 2: w<0.25 3 ~ 7: 预备 9 真空泵交换时间 s…
Rev1.0
机器控制参数
4-98
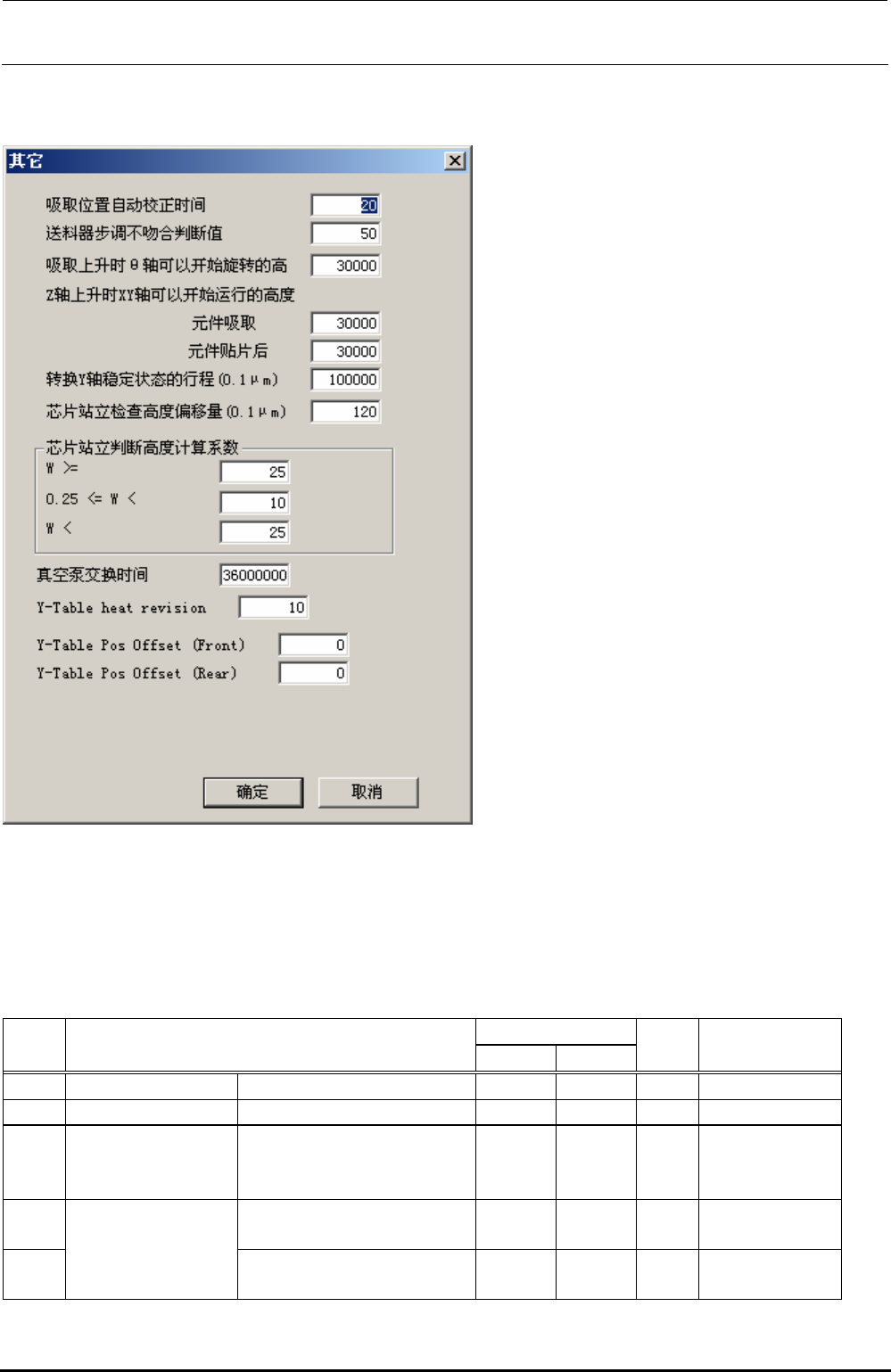
4.5.25 其他(其它)
图 4.5-25 其它
(1) 设置画面的显示方法
菜单: [输入]→[其他]→[其他]→[其它]
起动: [其他]按键→[其他]标签→[其它]按键
(2) 设置项目
输入范围
№
项目
最小值
最大值
单位 备考
1
吸取为止自动校正时间
每次 初期值:20
2
送料器步调不吻合判断值
%
初期值:70
3
吸取上升时 T 轴可以旋转
的最低高度(基板上面/吸取
高度的偏移量)
0.1
μm
初期值
値:30000
(3mm)
4
元件吸取后(从最大元件高
度到元件下面位置的偏移)
0.1
μm
初期值:30000
(3mm)
5
Z轴上升时 XY 轴
可以运行的最低高
度
元件贴片后(从最大元件高
度到吸嘴前端位置的偏移)
0.1
μm
初期值:30000
(3mm)
Rev1.0
机器控制参数
4-99
输入范围
№
项目
最小值
最大值
单位 备考
6
Y 轴转换等待稳定状态的
行程
0.1
μm
初期值:100000
(10mm)
7
芯片站立检查高度偏移量
0.1
μm
初期值:120
(0.012mm)
8
芯片站立判断高度计算系
数
0 7
0: w>=0.45
1:
0.25<=w<0.45
2: w<0.25
3~7: 预备
9
真空泵交换时间
s
初期值:
36000000
10 Y-Table heat revision
11 Y-Table Pos offset (Front)
12 Y-Table Pos offset (Rear)
◆修订履历
改版 日期 修订页 修订内容 备注
1.0 2008.12 初版