FX-2_机器控制参数.pdf - 第58页
Rev1.0 机器控制参数 4-32 输入范围 № 项目 简称 最小值 最大值 单位 备考 130 厂商设置用 Pr .No 0180 131 厂商设置用 Pr .No 0181 132 厂商设置用 Pr .No 0182 133 厂商设置用 Pr .No 0183 134 厂商设置用 Pr .No 0184 135 厂商设置用 Pr .No 0185 136 厂商设置用 Pr .No 0186 137 厂商设置用 Pr .No 018…
Rev1.0
机器控制参数
4-31
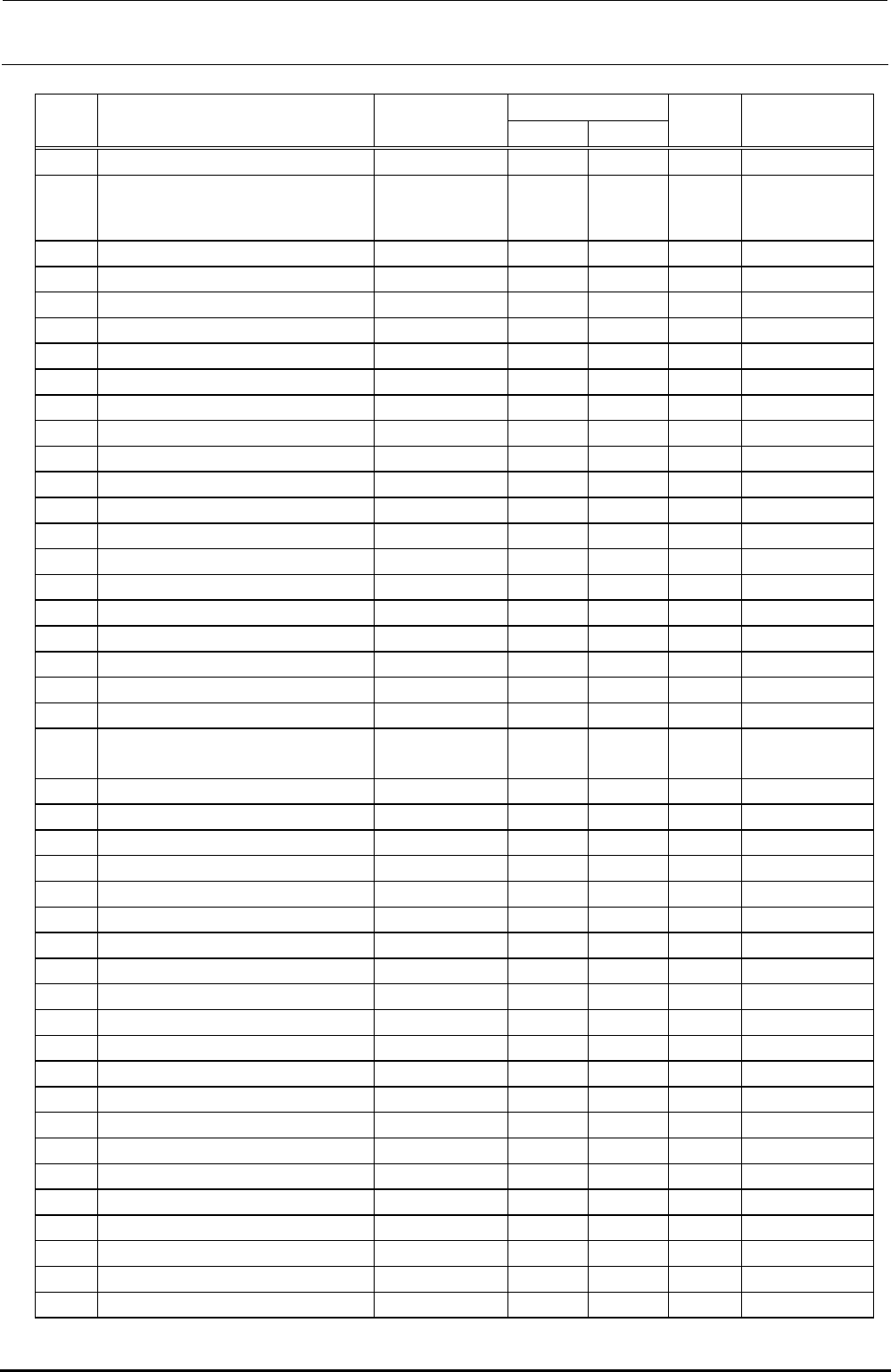
输入范围
№ 项目 简称
最小值
最大值
单位 备考
87
厂商设置用
Pr.No 0155
88
零速度
ZRSP
R/
min
Pr.No 0156
89
厂商设置用
Pr.No 0157
90
模拟监视器 1 输出
MOD1 Pr.No 0158
91
模拟监视器 2 输出
MOD2 Pr.No 0159
92
模拟监视器 1 偏置
MO1 mv Pr.No 015A
93
模拟监视器 2 偏置
MO2 mv Pr.No 015B
94
厂商设置用
Pr.No 015C
95
厂商设置用
Pr.No 015D
96
厂商设置用
Pr.No 015E
97
厂商设置用
Pr.No 015F
98
功能选择 C-4
COP4 Pr.No 0160
99
厂商设置用
Pr.No 0161
100
厂商设置用
Pr.No 0162
101
厂商设置用
Pr.No 0163
102
清除警报历史记录
BPS Pr.No 0164
103
厂商设置用
Pr.No 0165
104
厂商设置用
Pr.No 0166
105
厂商设置用
Pr.No 0167
106
厂商设置用
Pr.No 0168
107
厂商设置用
Pr.No 0169
108
线性编码器脉冲方向(设置增
减)
Pr.No 016A
109
厂商设置用
Pr.No 016B
110
厂商设置用
Pr.No 016C
111
厂商设置用
Pr.No 016D
112
厂商设置用
Pr.No 016E
113
厂商设置用
Pr.No 016F
114
输入信号自动接通选择 1
DIA1 Pr.No 0170
115
输入信号自动接通选择 2
DIA2 Pr.No 0171
116
输入信号选择 DI1
Pr.No 0172
117
输入信号选择 DI2
Pr.No 0173
118
输入信号选择 DI1
Pr.No 0174
119
厂商设置用
Pr.No 0175
120
输出设备选择 1
DO1 Pr.No 0176
121
输出设备选择 2
DO2 Pr.No 0177
122
输出设备选择 3
DO3 Pr.No 0178
123
厂商设置用
Pr.No 0179
124
厂商设置用
Pr.No 017A
125
厂商设置用
Pr.No 017B
126
厂商设置用
Pr.No 017C
127
功能选择 D-3
DOP3 Pr.No 017D
128
厂商设置用
Pr.No 017E
129
厂商设置用
Pr.No 017F
Rev1.0
机器控制参数
4-32
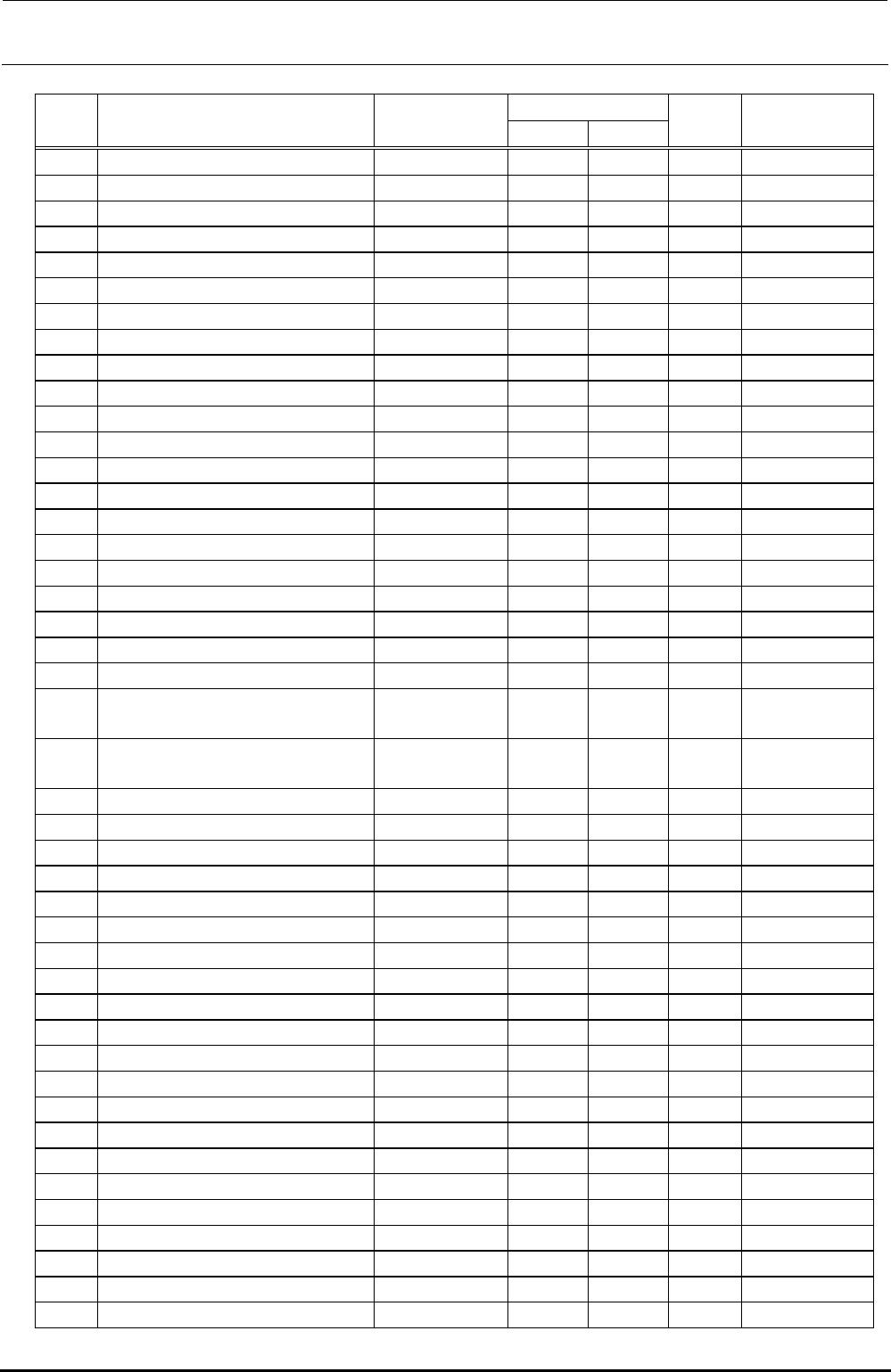
输入范围
№ 项目 简称
最小值
最大值
单位 备考
130
厂商设置用
Pr.No 0180
131
厂商设置用
Pr.No 0181
132
厂商设置用
Pr.No 0182
133
厂商设置用
Pr.No 0183
134
厂商设置用
Pr.No 0184
135
厂商设置用
Pr.No 0185
136
厂商设置用
Pr.No 0186
137
厂商设置用
Pr.No 0187
138
厂商设置用
Pr.No 0188
139
厂商设置用
Pr.No 0189
140
厂商设置用
Pr.No 018A
141
厂商设置用
Pr.No 018B
142
厂商设置用
Pr.No 018C
143
厂商设置用
Pr.No 018D
144
厂商设置用
Pr.No 018E
145
厂商设置用
Pr.No 018F
146
全闭环功能选择 1
Pr.No 0190
147
厂商设置用
Pr.No 0191
148
全闭环控制故障检测功能
Pr.No 0192
149
全闭环电子齿轮 1 分子
Pr.No 0193
150
全闭环电子齿轮 1 分母
Pr.No 0194
151
全闭环控制速度偏差异常检测
电平
Pr.No 0195
152
全闭环控制位置偏差异常检测
电平
Pr.No 0196
153
双反馈滤波器
Pr.No 0197
154
厂商设置用
Pr.No 0198
155
厂商设置用
Pr.No 0199
156
厂商设置用
Pr.No 019A
157
厂商设置用
Pr.No 019B
158
厂商设置用
Pr.No 019C
159
厂商设置用
Pr.No 019D
160
厂商设置用
Pr.No 019E
161
厂商设置用
Pr.No 019F
162
厂商设置用
Pr.No 01A0
163
滤波器系数 1-1
IIRC11 Pr.No 01A1
164
滤波器系数 1-2
IIRC12 Pr.No 01A2
165
滤波器系数 1-3
IIRC13 Pr.No 01A3
166
滤波器系数 1-4
IIRC14 Pr.No 01A4
167
滤波器系数 1-5
IIRC15 Pr.No 01A5
168
滤波器系数 1-6
IIRC16 Pr.No 01A6
169
滤波器系数 1-7
IIRC17 Pr.No 01A7
170
滤波器系数 1-8
IIRC18 Pr.No 01A8
171
滤波器系数 2-1
IIRC21 Pr.No 01A9
172
滤波器系数 2-2
IIRC22 Pr.No 01AA
173
滤波器系数 2-3
IIRC23 Pr.No 01AB
Rev1.0
机器控制参数
4-33
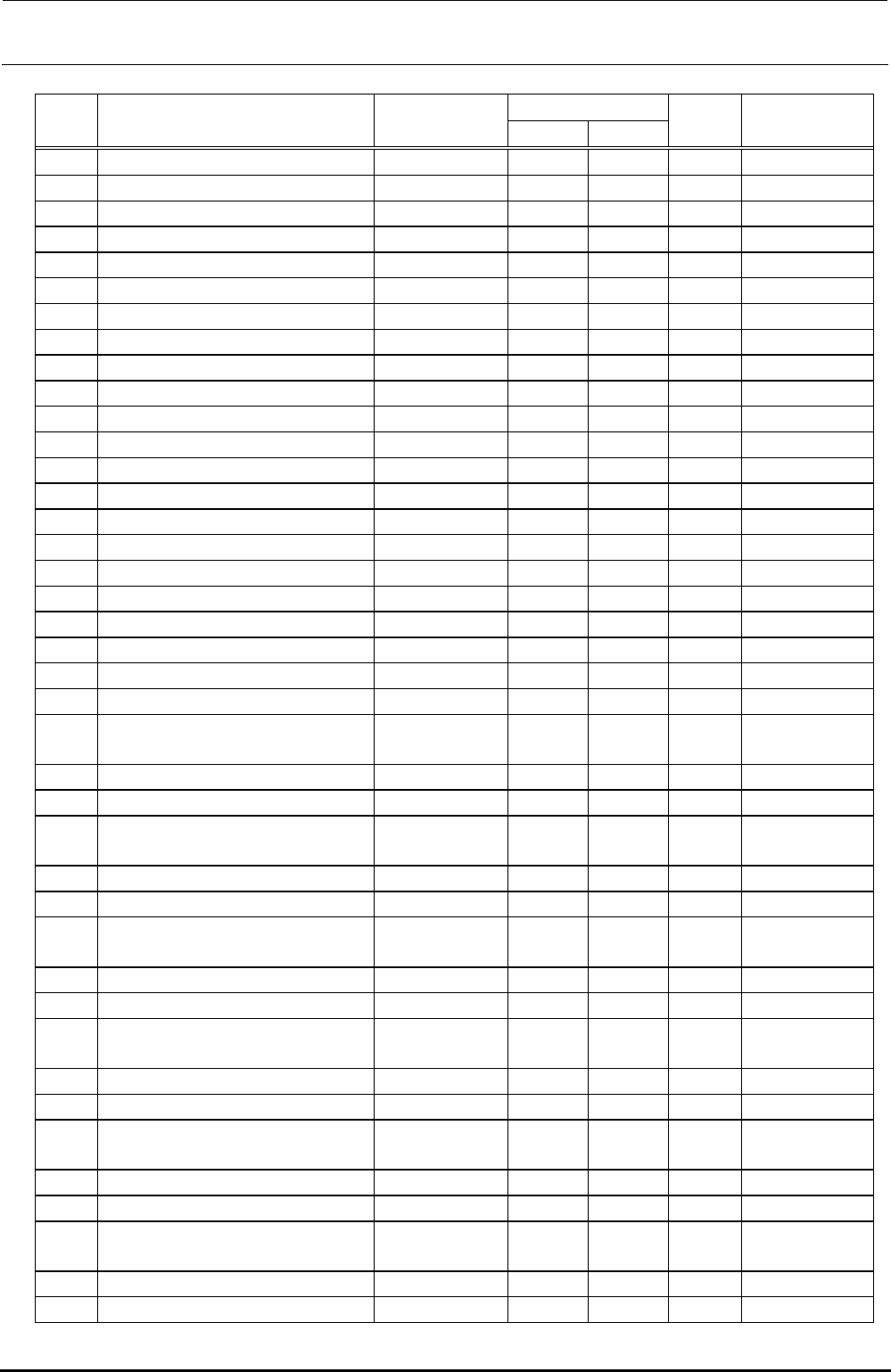
输入范围
№ 项目 简称
最小值
最大值
单位 备考
174
滤波器系数 2-4
IIRC24 Pr.No 01AC
175
滤波器系数 2-5
IIRC25 Pr.No 01AD
176
滤波器系数 2-6
IIRC26 Pr.No 01AE
177
滤波器系数 2-7
IIRC27 Pr.No 01AF
178
滤波器系数 2-8
IIRC28 Pr.No 01B0
179
全闭环电子齿轮 2 分子
Pr.No 01B1
180
全闭环电子齿轮 2 分母
Pr.No 01B2
181
(皮带刚性频率)
Pr.No 01B3
182
(皮带刚性增益)
Pr.No 01B4
183
(皮带刚性增益)
Pr.No 01B5
184
厂商设置用
Pr.No 01B6
185
厂商设置用
Pr.No 01B7
186
厂商设置用
Pr.No 01B8
187
厂商设置用
Pr.No 01B9
188
厂商设置用
Pr.No 01BA
189
厂商设置用
Pr.No 01BB
190
厂商设置用
Pr.No 01BC
191
厂商设置用
Pr.No 01BD
192
厂商设置用
Pr.No 01BE
193
厂商设置用
Pr.No 01BF
194
增益表 1 位置控制增益
PG1_1 Pr.No 01C0
195
增益表 1 速度积分补偿
VIC_1 Pr.No 01C1
196
增益比率表 1 负荷位置环路
稳定化补偿增益
AKZ_1 Pr.No 01C2
197
增益表 2 位置控制增益
PG1_2 Pr.No 01C3
198
增益表 2 速度积分补偿
VIC_2 Pr.No 01C4
199
增益比率表 2 负荷位置环路
稳定化补偿增益
AKZ_2 Pr.No 01C5
200
增益表 3 位置控制增益
PG1_3 Pr.No 01C6
201
增益表 3 速度积分补偿
VIC_3 Pr.No 01C7
202
增益比率表 3 负荷位置环路
稳定化补偿增益
AKZ_3 Pr.No 01C8
203
增益表 4 位置控制增益
PG1_4 Pr.No 01C9
204
增益表 4 速度积分补偿
VIC_4 Pr.No 01CA
205
增益比率表 4 负荷位置环路
稳定化补偿增益
AKZ_4 Pr.No 01CB
206
增益表 5 位置控制增益
PG1_5 Pr.No 01CC
207
增益表 5 速度积分补偿
VIC_5 Pr.No 01CD
208
增益比率表 5 负荷位置环路
稳定化补偿增益
AKZ_5 Pr.No 01CE
209
增益表 6 位置控制增益
PG1_6 Pr.No 01CF
210
增益表 6 速度积分补偿
VIC_6 Pr.No 01D0
211
增益比率表 6 负荷位置环路
稳定化补偿增益
AKZ_6 Pr.No 01D1
212
增益表 7 位置控制增益
PG1_7 Pr.No 01D2
213
增益表 7 速度积分补偿
VIC_7 Pr.No 01D3