00198373-01_UM_SWS-ZH.pdf - 第70页
3 技术数据和组件 《用户手册》 SIPLACE 晶圆系 统 (SWS) 3.4 SWS 的模块说明 版本 04/2018 70 3.4.4 晶圆台 晶圆台由一个 X-Y 单 元 (带有 2 个线性轴的 移动系统)和晶圆支撑件组成。 晶圆台将带有晶圆的晶圆支撑件移动 到处理区域中的要求位置。 3 图 3.4 - 3 晶圆台 (1) 夹持单元 (2) 晶圆相机 (3) 倒装单元 (4) 晶圆支撑件 (5) 导轨 4 3 1 2 5
《用户手册》 SIPLACE 晶圆系统 (SWS) 3 技术数据和组件
版本 04/2018 3.4 SWS 的模块说明
69
倒装单元可以使用标准的 SIPLACE 吸嘴 (9xx)和用于晶粒接合工具的特殊适配器。 对于其他
SIPLACE 贴片机而言,晶粒通过真空被贴附到吸嘴上。
倒装单元拥有一个旋转轴和一个 Z 轴,通过一个线性马达驱动。 在可选的晶粒贴附模式中,还有
另外一个线性马达将晶粒转送到晶粒贴附头上,以及另外一个用于晶粒贴附头的旋转轴。 这个旋
转轴负责旋转到 180° 的位置 (倒装片模式)或者 130° 的位置 (晶粒贴附模式)。 Z- 轴在拾取处
理过程中移动段位器。 可选的线性马达在晶粒贴附模式中移动段位器,将晶粒转送到晶粒贴附头
上。
3.4.3 晶圆相机系统
晶圆相机与晶圆表面相对齐。 此相机的图像将被视像系统用于识别被贴装晶粒的定义图形 (也称
为 “ 参考晶粒 ”)、墨点识别、晶粒位置计算和晶圆边缘识别。 在完成晶圆在下一个推送晶粒上的
定位后,将检查视像模板,然后确定晶粒的位置。 如果与目标值的偏差过大 (公差值可以被设
定)晶圆台将被重新定位以优化推送位置。
为补偿在同类型的不同晶圆间晶圆位置与晶圆框间的任何偏差值需要进行晶圆边缘识别。
标准相机系统的规格
对于尺寸为 0.8 到 12 mm 的晶粒使用了标准的相机系统。
此相机的视场大约为 10.5 x 6.7 mm。

3 技术数据和组件 《用户手册》 SIPLACE 晶圆系统 (SWS)
3.4 SWS 的模块说明 版本 04/2018
70
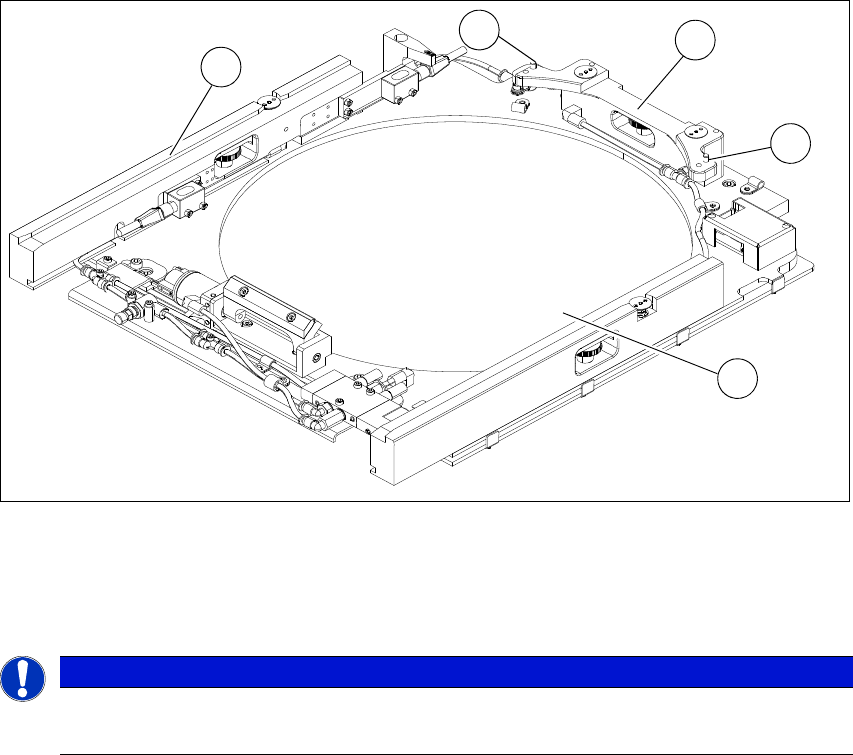
3.4.4 晶圆台
晶圆台由一个 X-Y 单元 (带有 2 个线性轴的移动系统)和晶圆支撑件组成。
晶圆台将带有晶圆的晶圆支撑件移动到处理区域中的要求位置。
3
图 3.4 - 3 晶圆台
(1) 夹持单元
(2) 晶圆相机
(3) 倒装单元
(4) 晶圆支撑件
(5) 导轨
4
3
1
2
5
《用户手册》 SIPLACE 晶圆系统 (SWS) 3 技术数据和组件
版本 04/2018 3.4 SWS 的模块说明
71
3.4.4.1 晶圆支撑件
晶圆支撑件被安装在 X-Y 单元上,因此属于晶圆台的一部分。 晶圆被固定在这里完成推送程序。
3
图 3.4 - 4 未插入晶圆的晶圆支撑件 (以 12" 为例)
(1) 用于锁定和位置识别的插销
(2) 晶圆锁定杆
3
请注意
如要处理 8" 或 6" 的晶圆,您需要更换晶圆支撑件。
结合相应的适配器可以使用 6" 晶圆。
1
2
1
2
2