TR7007_V1.4 - 第61页
Test Research Inc. TR 7007 User Guide -- So ftware 61 即時影像 3.10 顯示當前鏡頭位置下 FOV 的即時影像。 點選後會顯示相機目前位置的即時影像,使用者可以藉由移動 XY 與 Z 軸的機械手臂 看到受測板的特定地方觀察即時影像。即時影像的畫面可以藉由切換不同的光源觀察 受測板的特性。下面將會分類成 TRISPI 動態取相、走停取相與共用三種不同的機型 來介紹介面上的按鈕不同的使…
Test Research Inc.
60 TR7007 User Guide--Software
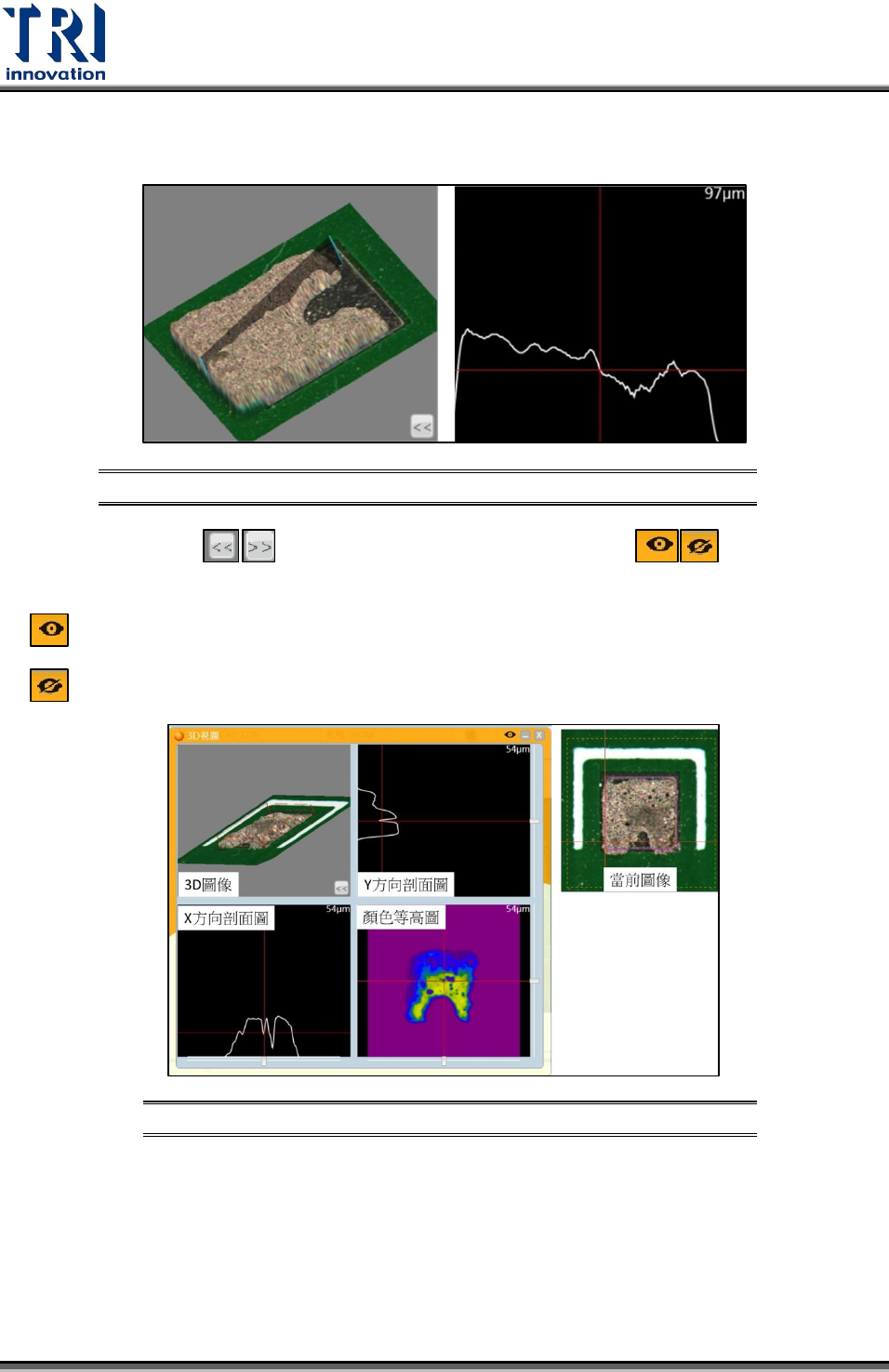
3D 圖示中分別點選滑鼠右鍵設定剖面的起始與結束位置,完成後會出現該平面的剖
面圖。剖面圖右上角的數值代表當前十字標位置下的高度值。
3D 圖下選取剖面位置示意圖 圖115
點選 3D 畫面中的 可展開或縮小剖面圖,點選畫面中的 可選擇是否鎖
定此畫面。
隨著點選其他區域而跳出相對應的 3D 圖。
鎖定此畫面,不會隨著點選其他區域而跳出相對應的 3D 圖。
當前選取區域的 3D 圖 圖116
Test Research Inc.
TR7007 User Guide--Software 61
即時影像 3.10
顯示當前鏡頭位置下 FOV 的即時影像。
點選後會顯示相機目前位置的即時影像,使用者可以藉由移動 XY 與 Z 軸的機械手臂
看到受測板的特定地方觀察即時影像。即時影像的畫面可以藉由切換不同的光源觀察
受測板的特性。下面將會分類成 TRISPI 動態取相、走停取相與共用三種不同的機型
來介紹介面上的按鈕不同的使用。
3.10.1 即時影像-通用機型
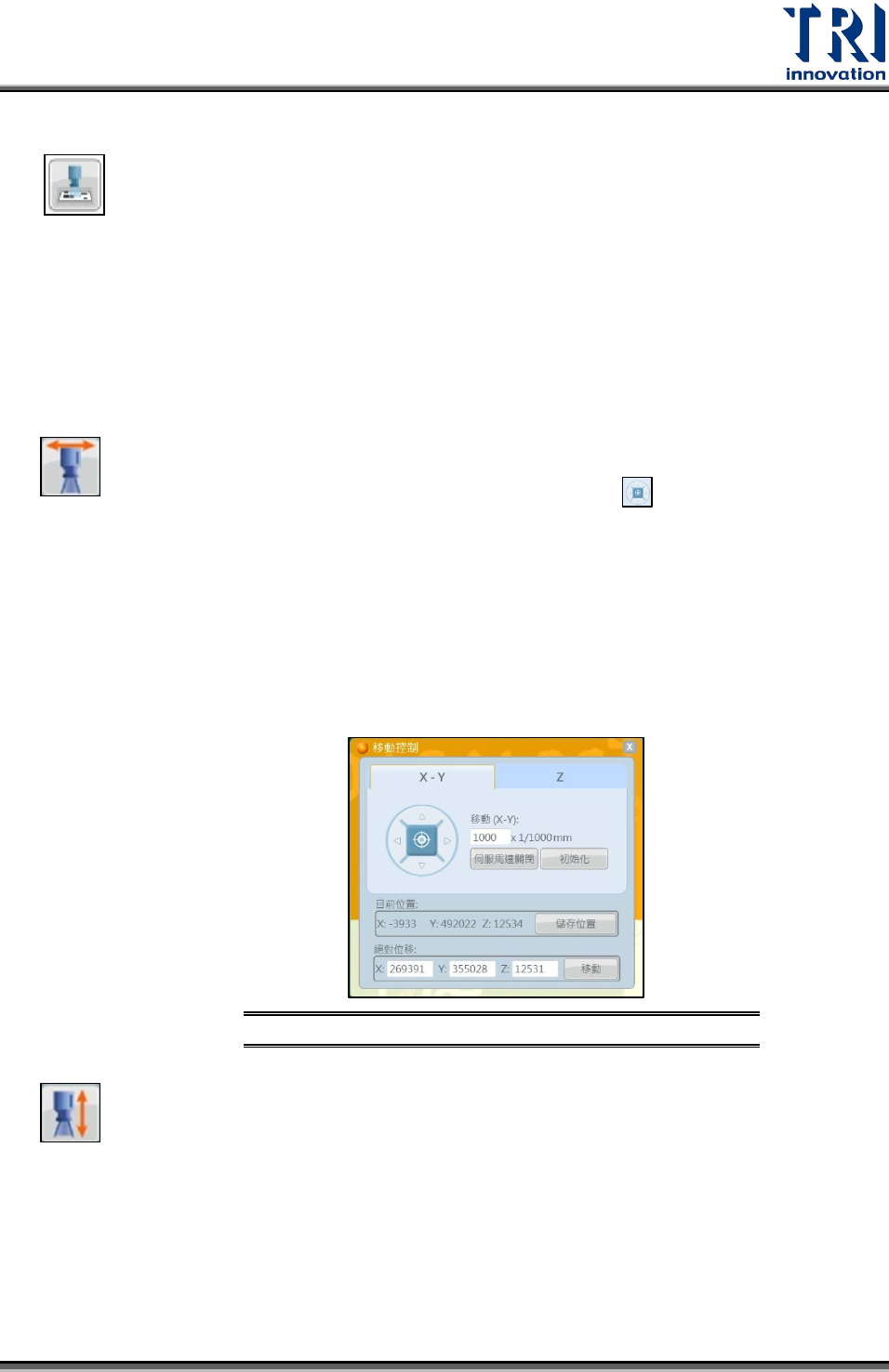
移動控制於 X 和 Y 軸
此模式下設定鏡頭每次移動的距離後,使用介面中 來移動鏡頭至欲觀看
的位置。
目前位置與絕對位移:
目前位置代表畫面中十字標中心的位置,點選”儲存位置”即儲存當
前位十字標的中心位置。
絕對位移代表鏡頭位移的距離,點選”移動”可直接移動到儲存位
置。
移動控制 X-Y 畫面
圖117
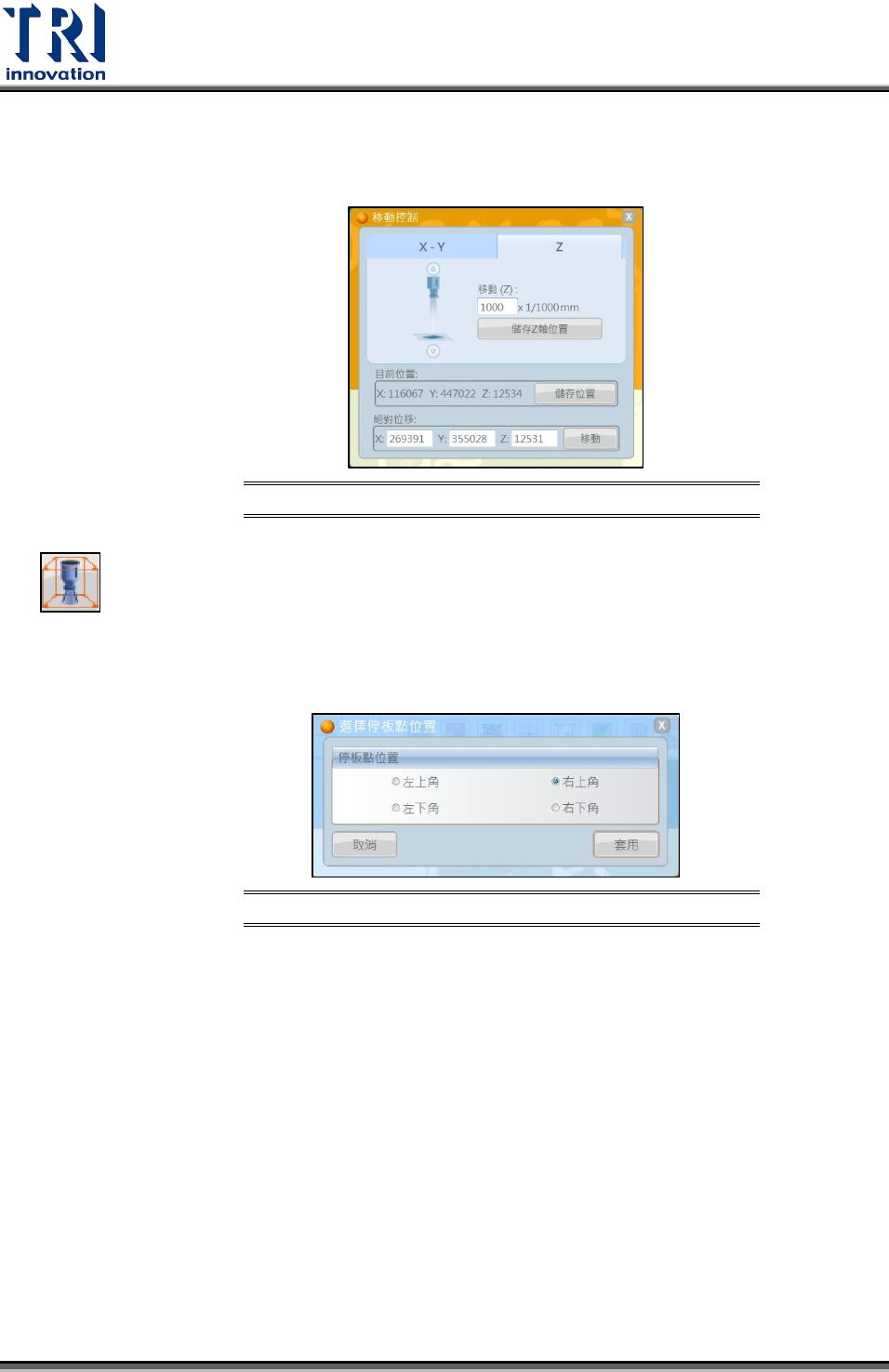
移動控制於 Z 軸
此模式下設定鏡頭每次移動的距離後移動鏡頭 Z 軸位置。
目前位置與絕對位移:
目前位置代表畫面中十字標的位置,點選儲存位置即儲存當前位
十字標的中心位置。
Test Research Inc.
62 TR7007 User Guide--Software
絕對位移代表鏡頭位移的距離,點選”移動”可直接移動到儲存位
置。
移動控制 Z 畫面
圖118
選擇停板點位置
因應產線流向不同可設定左方或右方為停板位置,停板位置需設定在傳輸
軌道的固定邊。當流向為左進右出時,預期的停止位置應設定在右下,流
向為右進左出時,則設定在左下。
選擇停板點的位置
圖119
點選此功能後,可於 FOV 影像下觀看當前鏡頭認定的停板點位置,若發現
與實際停板點有落差時,可使用移動控制介面移動或使用滑鼠直接於 FOV
影像區下快點兩下,將板邊移動到十字標中心。