3OM-1343-008_w.pdf - 第275页
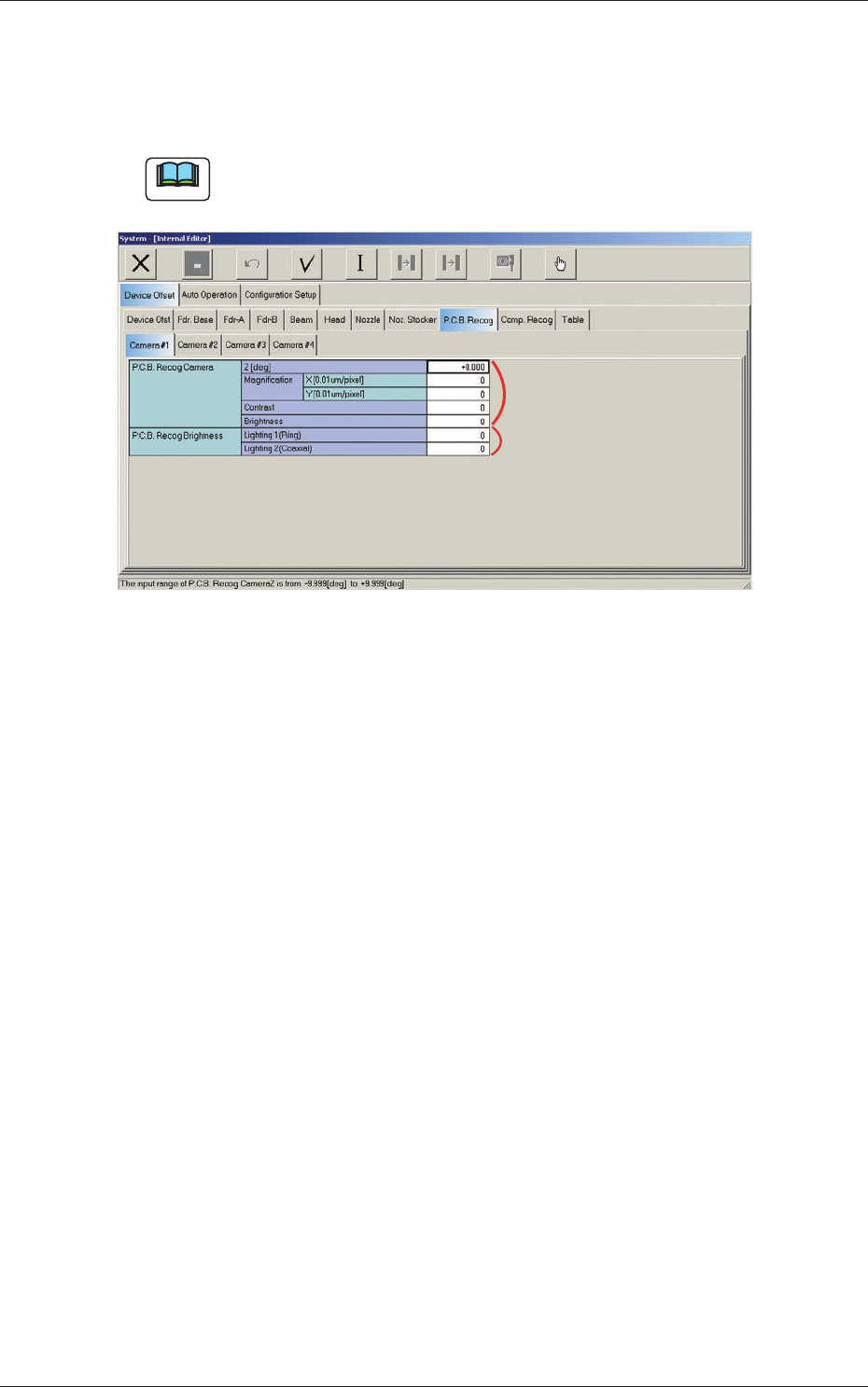
6-44 AKFEDT -ID 2.1.21 PCB Recognition Offset When the "PCB Recog" tab is pressed in the "Device Offset" tab sheet and the "Camera #1" tab is selected, the following tab sheet appears. Note …
6-43
AKFEDT-ID
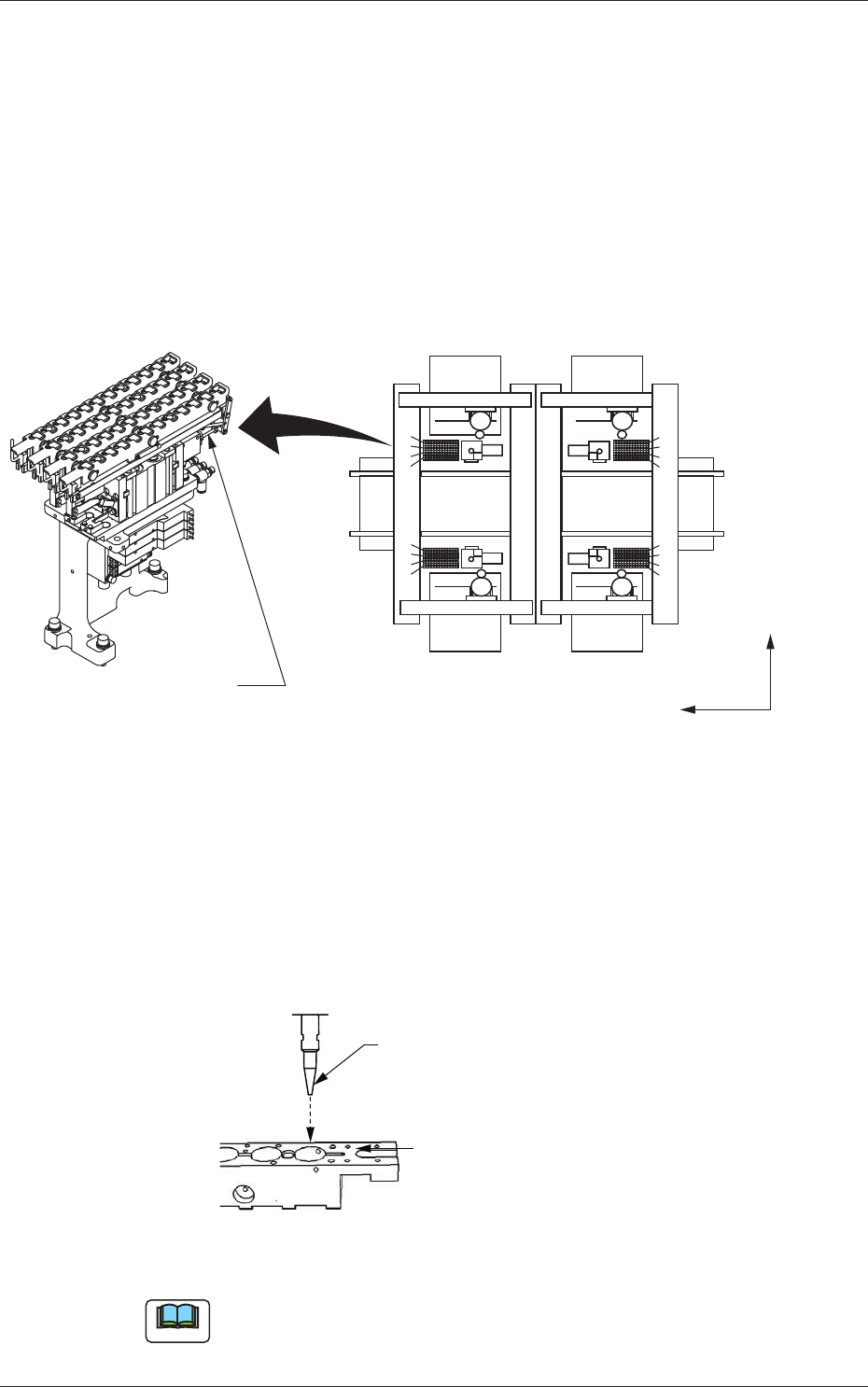
[1] X (Horizontal) and Y (Vertical) [mm]
This offset data is used to adjust the positional deviations based on the
design dimensions of the nozzle stocker unit positions (viewed from the
PCB positioning reference X/Y coordinates (Machine Reference X/Y
Coordinates: Origin P0)). The value based on the machine reference
X/L coordinate system must be entered in each text box.
When values are entered with a plus (+) sign, the nozzle change
positions are changed to "X (+)" and "Y (+)" shown below.
Placement Reference
X/Y Coordinate System
Y(+)
X(+)
2
1-4
1-3
1-2
1-1
2-1
2-2
2-3
2-4
3-4
3-3
3-2
3-1
4-1
4-2
4-3
4-4
4
3
2
1
1
2
3
4
5
6
7
8
9
10
11
12
(Front Side of Machine)
(Rear Side of Machine)
Nozzle Stocker A
4
3
1
Fig. 3F42
[2] L (Height) [mm]
When an offset value is set with a plus (+) sign, the nozzle change
position (height) is changed to "L (+)" shown below, concluding that
the descending stroke has increased.
L(+)
Nozzle
Nozzle Mounting Level
(Upper Surface of
Nozzle Stocker Block)
Fig. 3F43
Note
As for L, only the master becomes effective.
0601-002
2.1 Device Offset Data
6-44
AKFEDT-ID
2.1.21 PCB Recognition Offset
When the "PCB Recog" tab is pressed in the "Device Offset" tab sheet and
the "Camera #1" tab is selected, the following tab sheet appears.
Note
As for the "Camera #2", "Camera #3", and "Camera #4" tab sheets, the
same contents as the "Camera #1" tab sheet are displayed.
[1]
[2]
Fig. 3F44 "PCB Recog Camera #1" Tab Sheet
0607-003
2.1 Device Offset Data
6-45
AKFEDT-ID
Set the following offset values for each camera.
[1] PCB Recog Camera
The set parameters are used to adjust the horizontal tilt of the PEC
recognition camera.
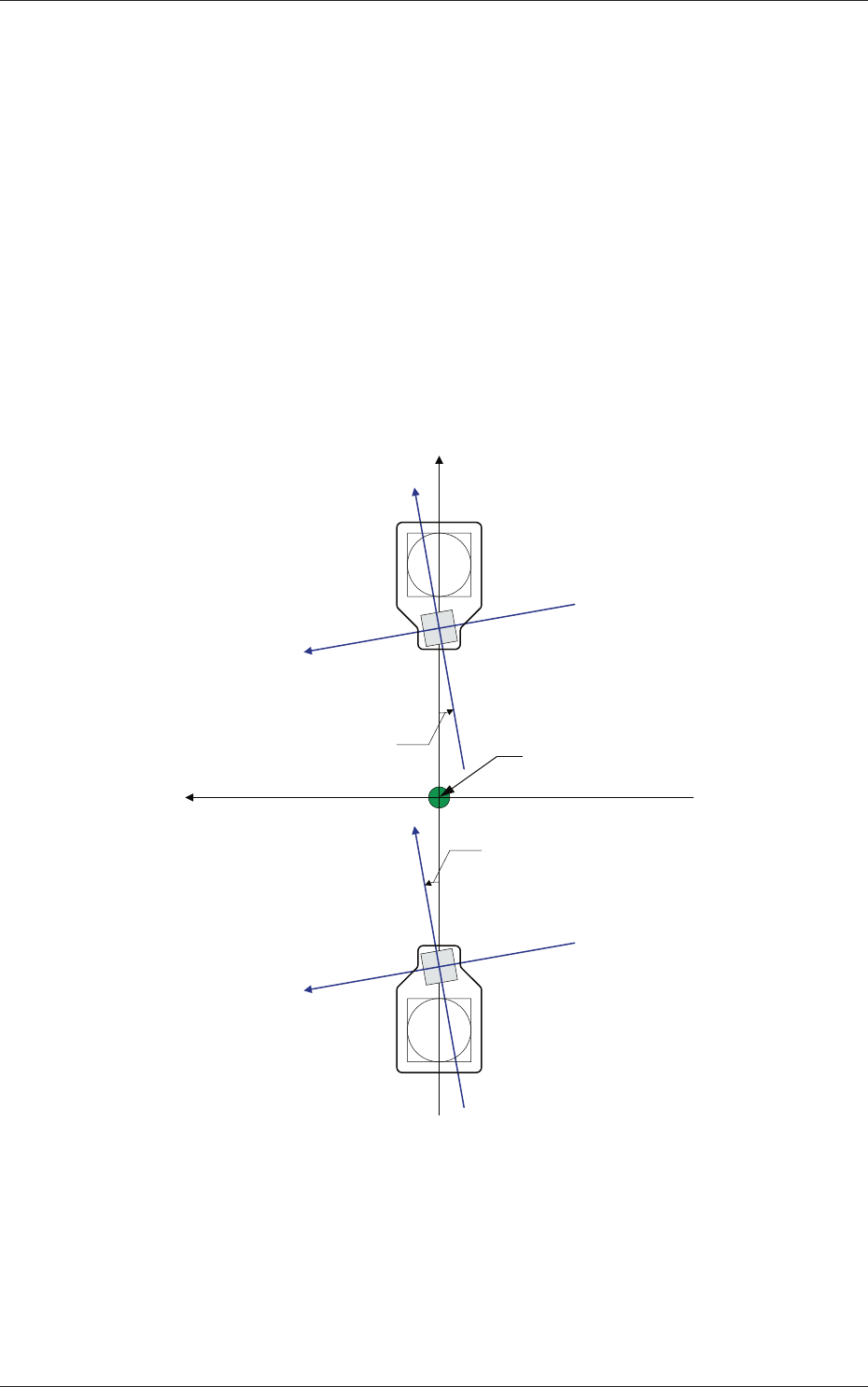
Z (Angle) [deg]
Set the parameters representing the angular deviations in the scanning
coordinates of the PEC recognition cameras based on the machine
reference X/Y coordinates (Xm-Ym).
When the camera scanning coordinates are shifted counterclockwise
to the machine reference X/Y coordinate system, a plus sign must be
affi xed to each offset data.
Xm(+)
Ym (+)
Yc (+)
Xc (+)
Yc (+)
Xc (+)
Xc-Yc : PEC Recognition
Coordinate System
Xm-Ym : Machine Reference
Coordinate System
Pm. Machine Reference
Coordinate Origin
Angle of PEC Recognition Camera
Angle of PEC Recognition Camera
Fig. 3F45
0601-002
2.1 Device Offset Data