3OM-1343-008_w.pdf - 第279页
6-48 AKFEDT -ID Set the following offset values for each camera. [1] Comp Recog Camera X (Horizontal) and Y (V ertical) [mm] The set parameters are used to adjust the positional deviations based on the design dimensions …
6-47
AKFEDT-ID
0607-003
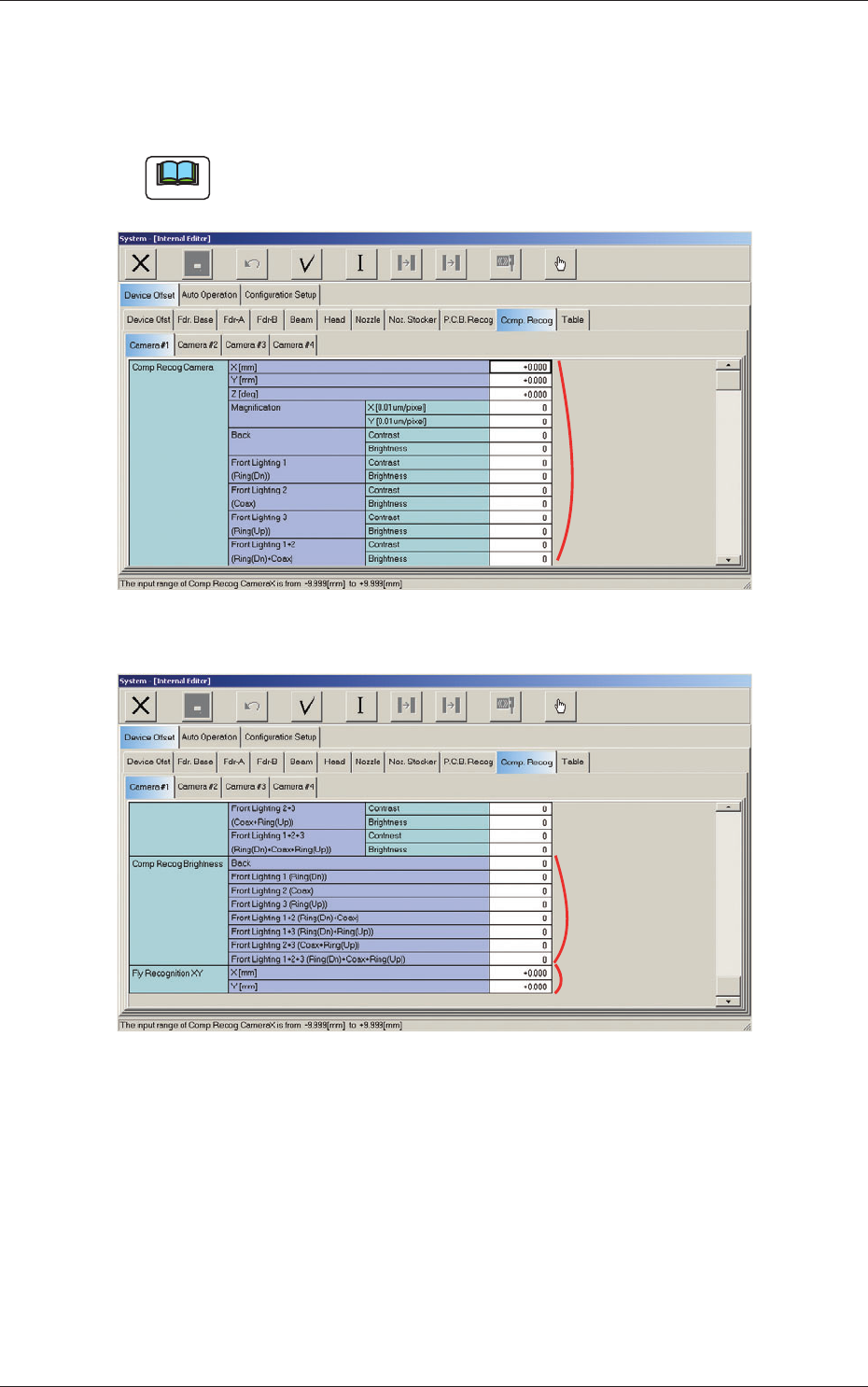
2.1.22 Component Recognition Offset
When the "Comp. Recog" tab is pressed in the "Device Offset" tab sheet and
the "Camera #1" tab is selected, the following tab sheet appears.
Note
As for the "Camera #2", "Camera #3", and "Camera #4" tab sheets, the
same contents as the "Camera #1" tab sheet are displayed.
[1]
Fig. 3F46 "Comp. Recog Camera #1" Tab Sheet (1)
[2]
[3]
Fig. 3F47 "Comp. Recog Camera #1" Tab Sheet (2)
2.1 Device Offset Data
6-48
AKFEDT-ID
Set the following offset values for each camera.
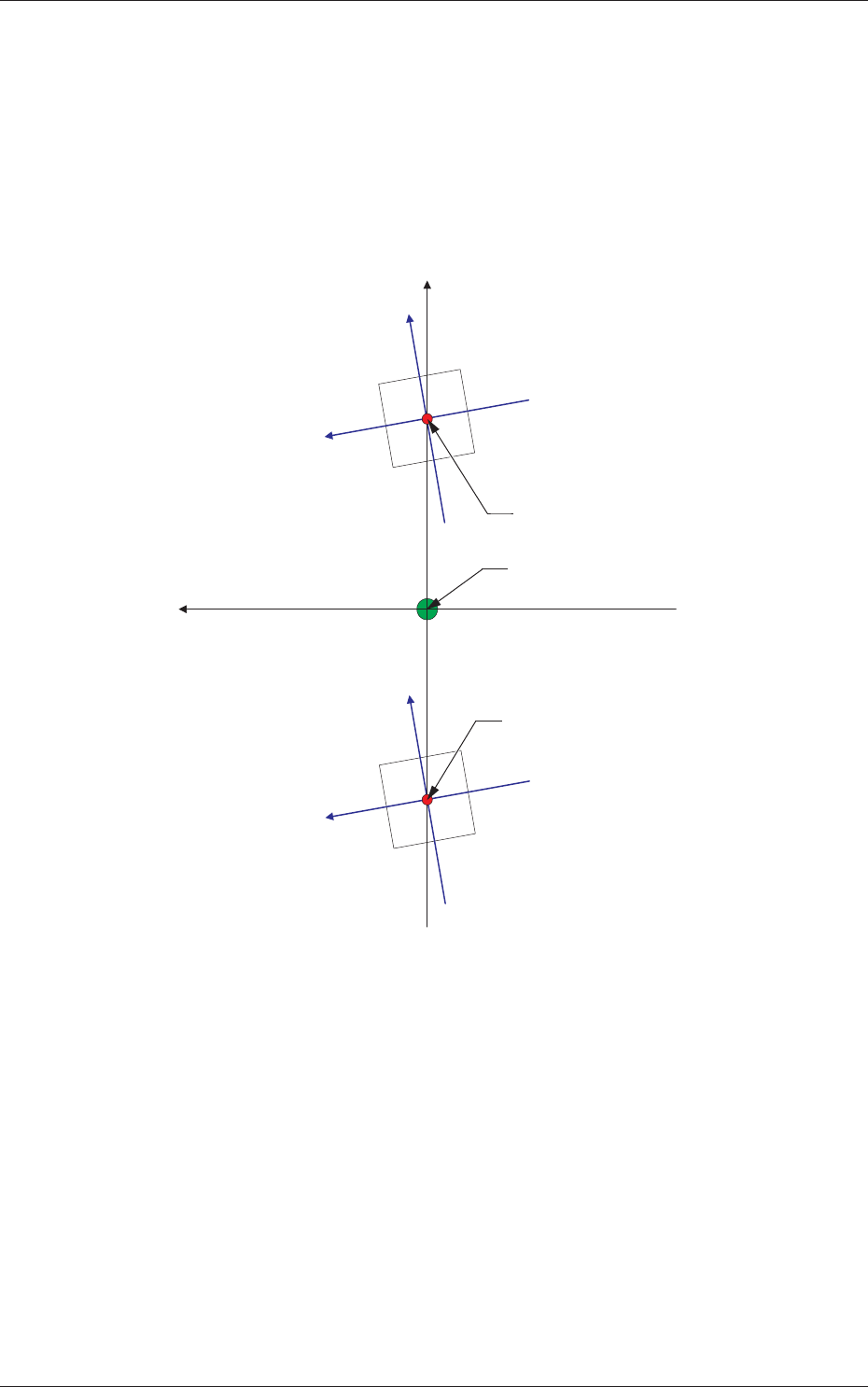
[1] Comp Recog Camera
X (Horizontal) and Y (Vertical) [mm]
The set parameters are used to adjust the positional deviations based on
the design dimensions between the machine reference coordinate origin
and the center of the component recognition cameras.
Xm (+)
Ym (+)
Xm-Ym : Machine Reference
Coordinate System
Xc-Yc : Component Recognition
Camera Coordinate System
Xc (+)
Yc (+)
Xc (+)
Yc (+)
Center of Component
Recognition Camera
Center of Component
Recognition Camera
Pm. Machine Reference
Coordinate Origin
Fig. 3F48
0601-002
2.1 Device Offset Data
6-49
AKFEDT-ID
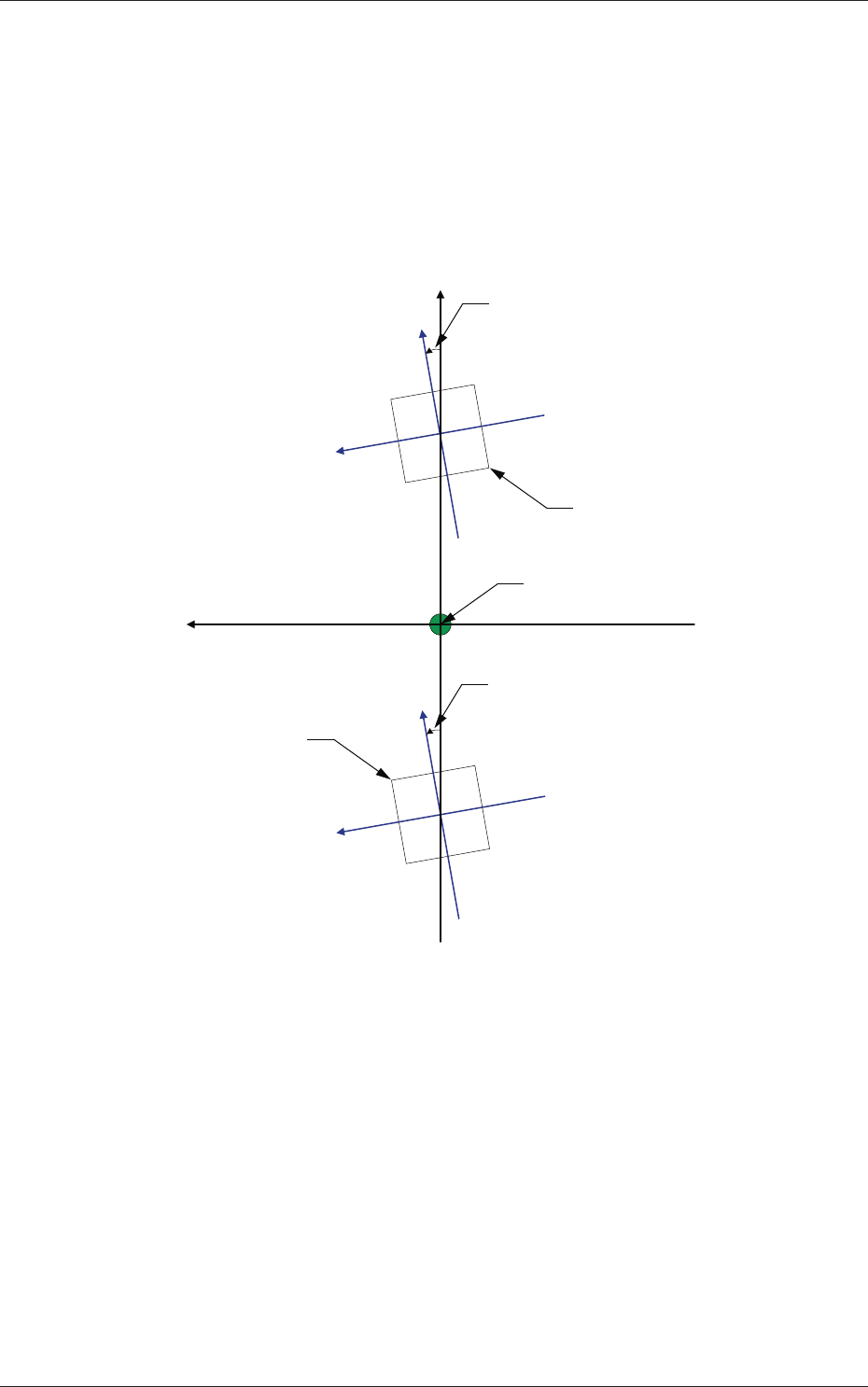
Z (Angle) [deg]
Set the parameters representing the angular deviations in the scanning
coordinates of the component recognition cameras based on the
machine reference X/Y coordinates (Xm-Ym).
When the camera scanning coordinates are shifted counterclockwise
to the machine reference X/Y coordinate system, a plus sign must be
affi xed to each offset data.
Xm(+)
Ym(+)
Xc-Yc : Component Recognition
Camera Coordinate System
Xc (+)
Yc (+)
Xc (+)
Yc (+)
Pm. Machine Reference
Coordinate Origin
Angle of Component Recognition Camera
Angle of Component Recognition Camera
Component Recognition Camera
Component Recognition
Camera
Xm-Ym : Machine Reference
Coordinate System
Fig. 3F49
Magnifi cation X (Horizontal) and Y (Vertical) [0.01 mm/pixel]
Set how many micrometers should be equivalent to one pixel to specify
the magnifi cation of the component recognition camera.
The parameters are automatically calculated through teaching
operations performed using the magnifi cation measurement jig.
•
Default:
6060
0601-002
2.1 Device Offset Data