SM471PLUS_Admin(Chi_Ver2.3) - 第102页
4-20 Fast Chip Shooter SM471 PLUS Admini st rator’s Guide 宽度 : 指定传送 装置 ( Conveyor ) 的宽度驱动轴。 < 头部装置 > 组合框 利用 < 轴 > 组合框中选择的驱动电动机, 移动到 < 位置 > 领域 中设定的位置时, 选择该位置坐标基准的对象。 可选 择的对象如下。 基准相机 1: 设定基于所述基准点照相机…
4-19
Tools
简化操作
(shortcut)
菜单
4.7. Manual Tool
为了以下的手工操作执行此菜单,此菜单以服务人员权限执行。
手工运行设备的各轴马达,为了获取相应轴的坐标时执行
检查照相机状态或捕捉VISION形象时执行
检查照相机照明或检查Head动作。
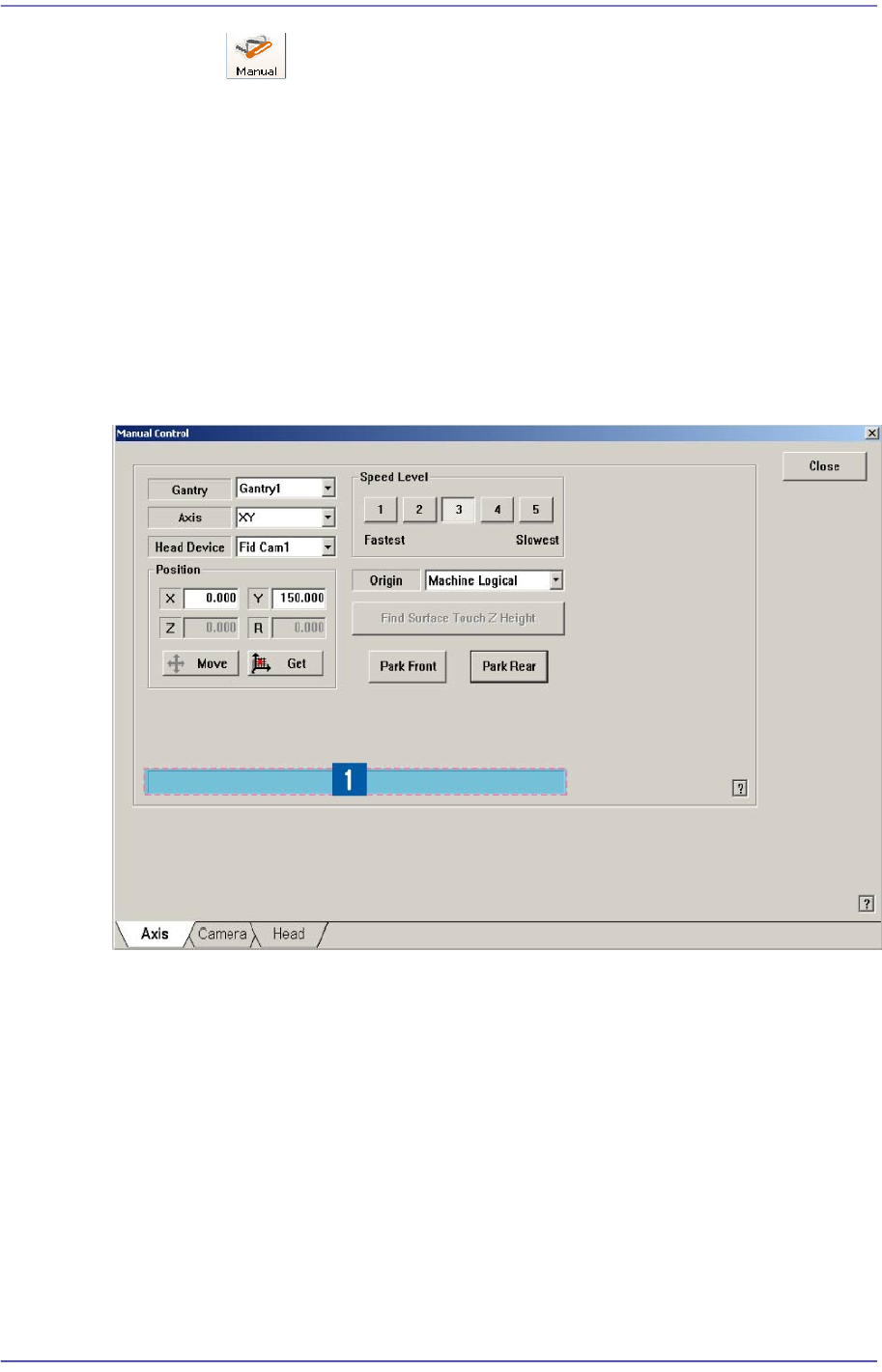
4.7.1. 轴移动对话框
运行各轴对应的电动机,移动所选对象的位置或获取该对象的当前坐标时使用。
图
4.7 “
手动工具
–
轴
”
对话框
1:
状态表示领域
<臂> 组合框
显示要手动运行的Gantry。
<轴>组合框
选择需要操作的驱动轴。可选择的驱动轴如下。
XY: 选择X及Y轴的驱动电动机。
Z: 指定Head的 Z驱动轴。
R: 指定Head的R驱动轴。
镜子: 指定飞行照相机用反射镜(镜子)驱动轴。

4-20
Fast Chip Shooter SM471 PLUS Administrator’s Guide
宽度: 指定传送装置(Conveyor)的宽度驱动轴。
<头部装置> 组合框
利用<轴>组合框中选择的驱动电动机,移动到<位置>领域中设定的位置时,
选择该位置坐标基准的对象。可选择的对象如下。
基准相机1: 设定基于所述基准点照相机的位置的坐标。
头1 ~ 头10: 相对于1至10倍的位置头设置的位置坐标。
(SM421仅设置位置坐标根据1号?4头的位置。)
<速度水平> 领域
选择所选驱动电动机运行时的Speed Level。
可选择的速度级别如下。
1: 最快的速度驱动所选电动机。 (Fastest)
2: 快速驱动所选电动机。 (Fast)
3: 中速驱动所选电动机。 (Middle)
4: 慢速驱动所选电动机。(Slow)
5: 最慢的速度驱动所选电动机。 (Slowest)
<位置> 领域
用于输入所要移动位置的坐标或以所选装置为基准把对象移动到输入坐标位置
并获取该对象的当前坐标。 编辑框中输入的值如下。
X: X轴的坐标值
Y: Y 轴的坐标值
如果被选对象为输送机宽度调节电动机,应输入的不是Y坐标,是输送机宽
度。
Z: Z 轴坐标
R: Theta 轴角度
<移动> 按钮
以所选装置为基准把对象移动到输入坐标位置时使用。
<得到> 按钮
获取被选对象的当前位置(坐标或角度)其结果显示在状态表示领域。
<移到固定相机> 按钮
选择的对象移动到固定相机位置。
<装置> 组合框
选择基准原点的方式。 可选择的基准原点如下。
4-21
Tools
简化操作
(shortcut)
菜单
设备配置合理: 指定设备的原点为基准原点。
前面喂料器座(1): 指定前置工序的喂料器组的原点为基准原点。
后面喂料器座(2): 指定后置工序的喂料器组的原点为基准原点。
状态表示领域
显示手动操作时发生的信息。
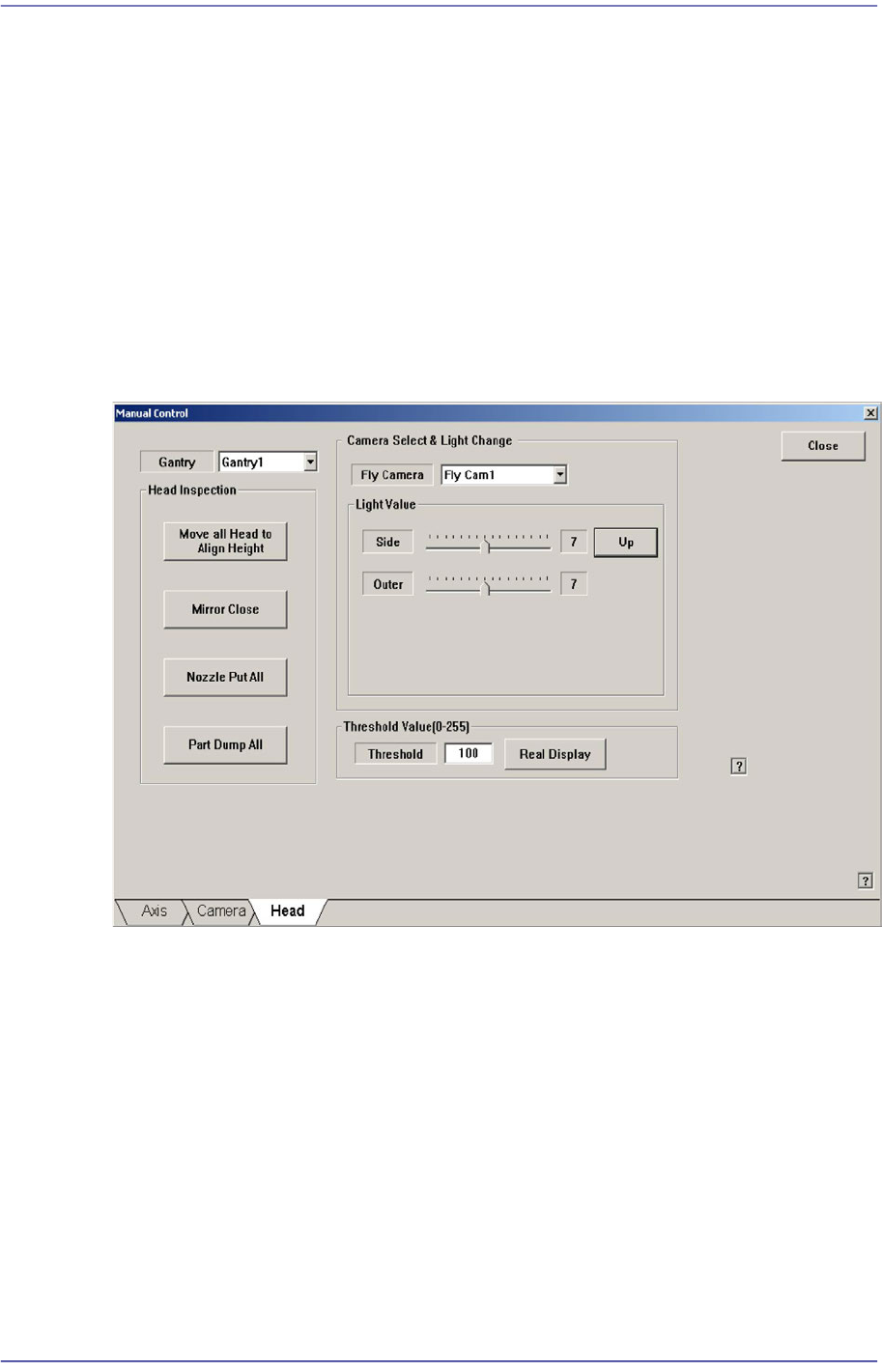
4.7.2. 头 TAP对话框
利用Vision System手动识别部件,设定Camera的照明或检查头部动作。
图
4.8 “
手动操作
–
头
”
对话框
<臂> 组合框
选择想要执行检查Head所属的Gantry。
<HEAD部检验> 领域
<向前移动/排列高度> 按钮
为部件识别,把所头部头的吸嘴末端对准Align 高度。
<镜子 打开/关闭> 按钮
为部件识别打开或关闭Mirror。
<放下全部吸嘴> 按钮
把所有贴装在磁头部的吸嘴返还到ANC。