SM471PLUS_Admin(Chi_Ver2.3) - 第248页
8-8 Fast Chip Shooter SM471 PLUS Admini st rator’s Guide 注意 作业中如果利用此功能可提高对应喂料器的吸附成功率, 但执行 袋示教需要时间, 并 补正吸附点 ( Pic kup Point ) 的坐标可能无法 进行同时吸附。 备 注 执行料袋 (Pocket) 示教时, 将自动反映料袋 (Pocket) 示教时 所 得到的偏移 ( Of fset) 信息, 从而自动补偿带式供料…
8-7
供应装置的设置
组合框中选择的对象移动到指定的坐标位置。 运行 “Move”之前,先要用鼠
标单击需要移动的位置的坐标值对应的Grid 领域 (Tape Feeder的吸附点坐标
)。
<Get> 按钮
以组合框中选择的对象为基准获取X, Y坐标。 运行 “Get”之前,先要用鼠标
单击需要移动的位置的坐标值对应的Grid 领域 (Tape Feeder的吸附点坐标
)。
<站位移动/喂料器移动> 按钮
选择Slot别移动所选Device还是设置Tape Feeder的Slot别移动所选Device。
每次点击此按钮时轮着设定“站位移动”和 “Feeder Move”。
站位移动 时
按钮选择当前选定Slot以前的Slot, 按钮选择当前选定Slot的
以后 Slot。
喂料器移动 时
按钮在当前选定的设置 Feeder的Slot的以前Slot中选择设置Tape
Feeder的Slot(按Slot序号小的顺序), 按钮在当前选定的设置Feeder
的Slot的以后Slot中选择设置Tape Feeder的Slot。(按Slot 序号大的顺序)
<小型示教> 按钮
在“喂料器登录 ”对话框对所选带式喂料器手动执行‘袋示教’功能时使用。虽已
在喂料器底座的插槽正常安装特定带式喂料器,但由于对应喂料器的问题与系
统设置的吸附点有差距时利用此功能人为自动调节吸附点。
用Tape Feeder供应的Chip-Rect部件时,利用Pocket Teach功能会比较正确地进
行吸附。
一般出现吸附错误会对应部件设置的再吸附次数同等的次数试图进行吸附。超
过最后次数时发生故障的同时停止作业。
但是,超过最后次数之前供应到Tape Feeder的部件时,利用Pocket Teach功能查
找正确的吸附点补正吸附位置后进行吸附。
Pocket Teach识别被供应Tape的Pocket或Soup racket hole后,补正当前的吸附位
置对准
Pocket的中心位置。
执
行袋示教则在‘Grid’领域的<PT>列反映其结果。
(ON-S:成功,ON-F:失败)
如果设置成自动运行中执行‘袋示教’功能,则在“喂料器登录” 对话框的‘Grid’
领域<PT>列为OFF或ON-F时不适用此功能。
8-8
Fast Chip Shooter SM471 PLUS Administrator’s Guide
注意 作业中如果利用此功能可提高对应喂料器的吸附成功率,但执行
袋示教需要时间,并补正吸附点(Pickup Point)的坐标可能无法
进行同时吸附。
备 注 执行料袋(Pocket)示教时,将自动反映料袋(Pocket)示教时所
得到的偏移(Offset)信息,从而自动补偿带式供料器的原点
(Home)偏移。但,偏移值的补偿适用于下一个供料。
Vision所识别的位置与逻辑原点之间的距离超过0.2mm时,
供料器将忽略偏移(Offset)值。
使用1005/0603以外的元器件的电动供料器不使用HomeOffset
调节功能。
<校正所有喂料器取料中心>按钮
安装在对应喂料器底座的带式喂料器中在“喂料器登录 ”对话框的<Grid>领域对
<PT>列设置成ON或ON-S的所有带式喂料器反复执行‘袋示教’功能。
<拾取> 按钮
对当前 “Feeder Base”对话框中选择的Tape Feeder执行部件吸附。此时,应该预
先选择Device(要执行吸附的磁头) 成功地吸着后显示以下对话框。
<Part Dipping to Flux> 按钮
把对应的部件移动到FLUX装置沾上焊剂后Head Spindle上升到部件识别高度。
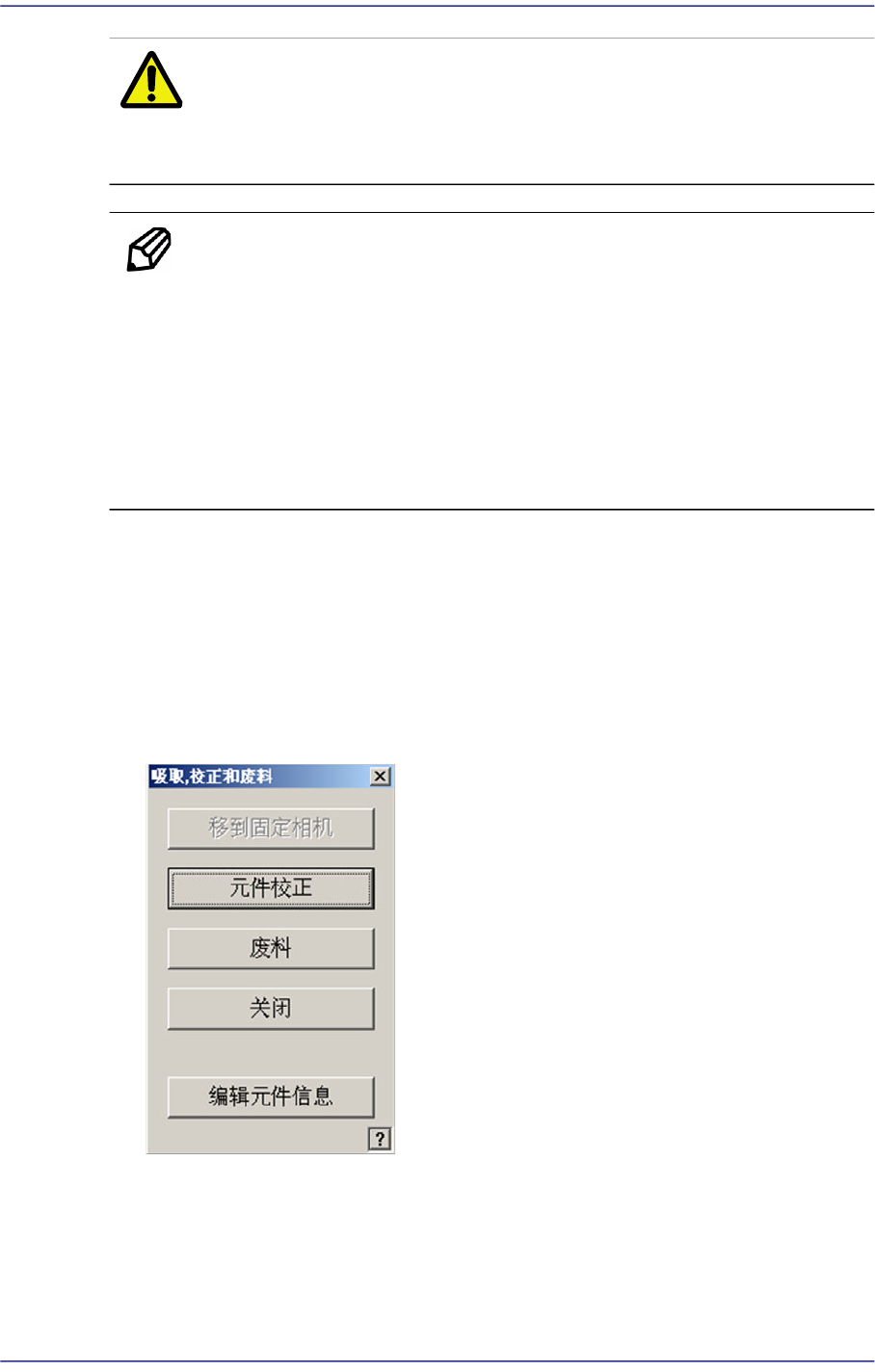
<移到固定相机> 按钮
用视角 照相机排列该部品时,只有在进行排列的摄象机为固定照相机时此功能
8-9
供应装置的设置
处于活性化状态。单击此按钮时,<示教> 领域的 <装置> 组合框中选择的对象
移动到固定相机位置。
<元件校正> 按钮
进行对该部品的排列。
<废料> 按钮
把部品堆存到指定的废料盒。
<关闭> 按钮
关闭对话框。
<编辑元件信息> 按钮
显示该部品元器件编辑对话框。
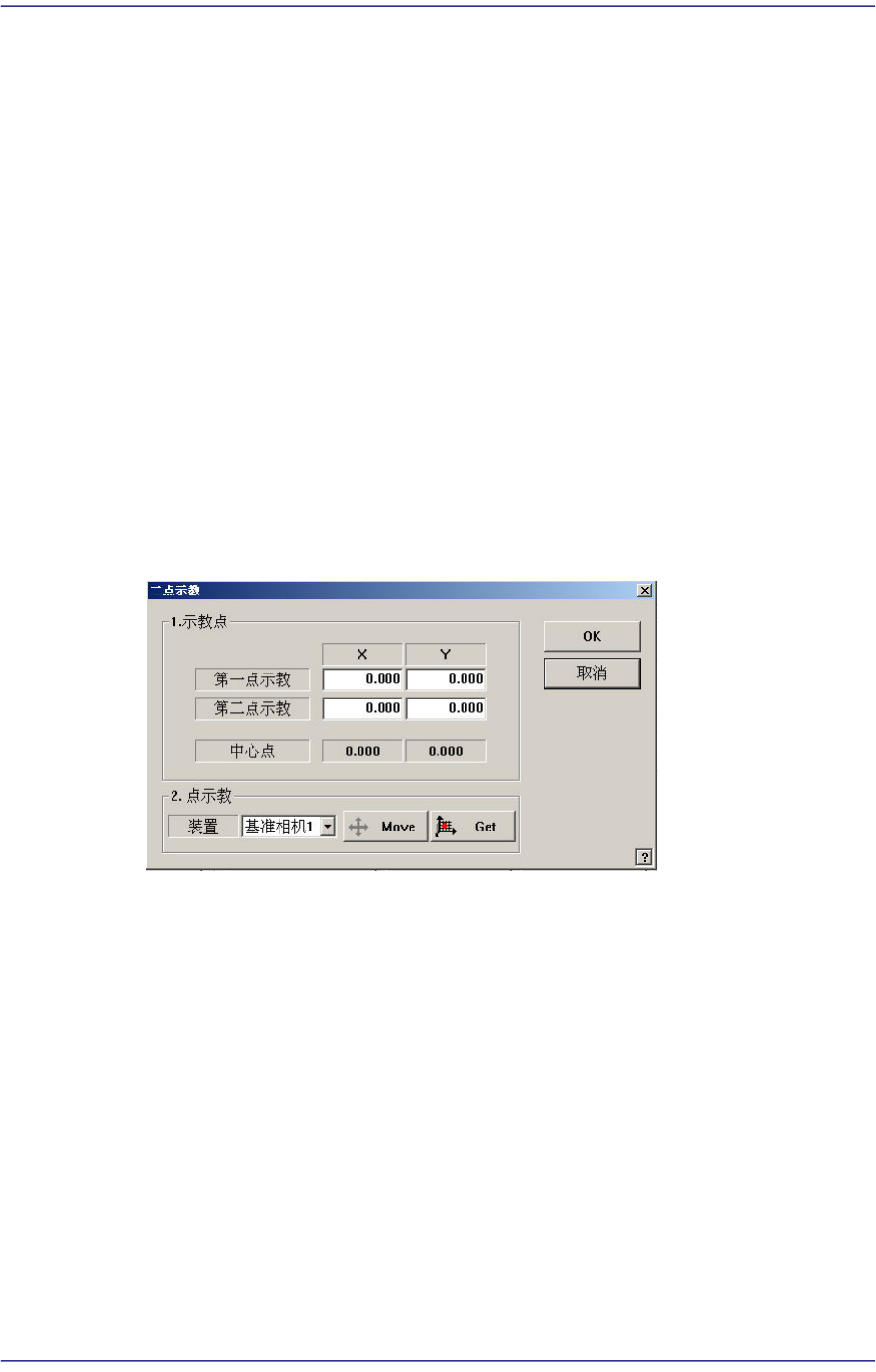
<两点示教…> 按钮
因画面不显示全部部件很难示教部件的中心时使用的功能,示教相应部件的对
角线2点来示教部件中心的方法。单击此按钮时显示以下对话框。
图
8.6 “
喂料器
:
在喂料器基座示教
2
个点
”
对话框
<1.示教点> 领域
设定用来计算中心点的对角线两段的2个点的位置。
示教第1个点:设定对角线两段的2个点当中第一个点的位置。
示教第2个点:设定对角线两段的2个点当中第二个点的位置。
中心点:显示利用对角线两段的2个点算出的中心点。
<2.点示教> 领域
用于旋转XY轴驱动电动机把选定的对象移动指定的坐标位置或用于获取已
选对象的当前坐标。
<装置> 组合框
用于旋转XY轴驱动电动机选择要移动到指定坐标位置的对象或用于选
择所要获取当前坐标的对象。可选择的对象如下;