KE-2070_80_80R_Instruction_Manual_Rev10_C.pdf - 第752页
第 2 部 功能详细编 第 9 章 手动控制 9-15 9-4-1-3 激光/传感器控制 从菜单栏中选择 “控制 (C )”→“ H e a d ( H ) ”→ “激光/传感器控制(L)” 或选择命令按钮的 “激 光/传感器控制”,则显示如下的激光/传感器控制画面。 图 9-4-1-3-1 激光/传感器控制画面(例:KE-2080) (1) 控制单元 利用按钮来选择控制对象单元。 不受机器设置的“使用单元”设置的影响。(也可以选择不使…
第 2 部 功能详细编 第 9 章 手动控制
9-14
● 在控制单元中选择了 BMS(坏板标记传感器)时的控制方法
1) XY 轴移动
与Head控制的XY轴移动相同。
2) 传感器控制
对BMS传感器开/关进行控制。
在控制项目的“传感器控制”被选中时,选择“开(O)”按钮、“关(F)”按钮、“开/关(/)”按钮
或按下“F3”键、“F4”键、“F5”键进行控制。
● 在控制单元中选择了 HMS 时的控制方法
1) XY 轴移动
与控制Head XY轴的移动相同。
2) 测量
测量高度的装置
在选中控制项目的“测量”时,选择“执行(E)”按钮或按下“F3”键进行控制。
在控制结束时更新测量结果的状态显示。
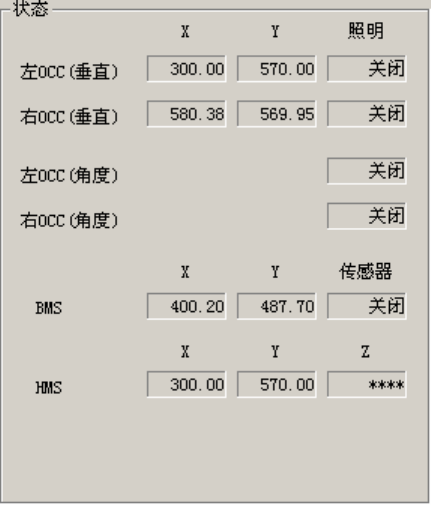
(4) 状态显示
① OCC
在XY轴坐标、照明的开/关控制结束时显
示。
② BMS
在XY轴坐标、照明的开/关控制结束时显
示。
连续显示传感器的开/关。
③ HMS
XY轴坐标、Z轴坐标控制结束时显示。
图 9-4-1-2-3 状态显示画面
第 2 部 功能详细编 第 9 章 手动控制
9-15
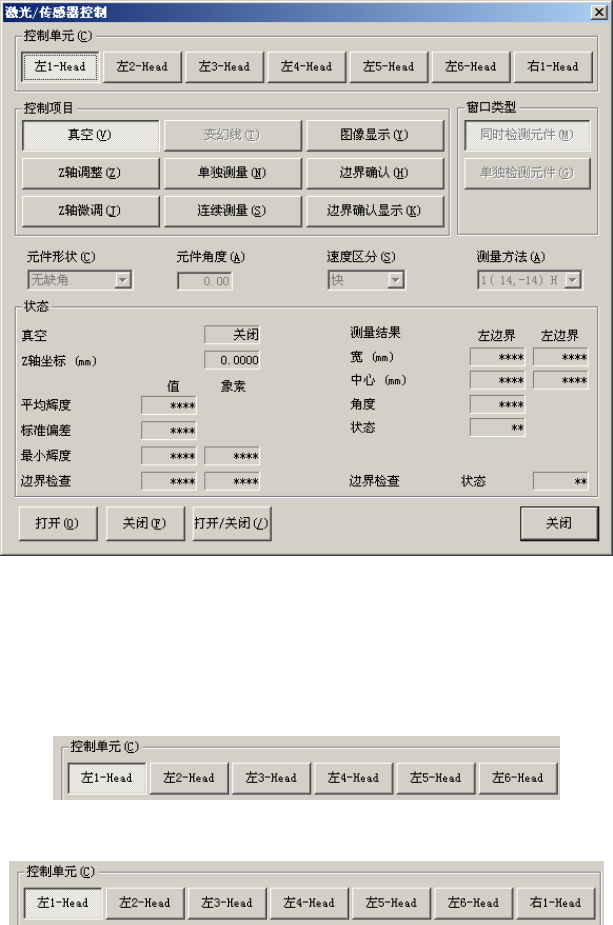
9-4-1-3 激光/传感器控制
从菜单栏中选择“控制(C)”→“Head(H)”→“激光/传感器控制(L)”或选择命令按钮的“激
光/传感器控制”,则显示如下的激光/传感器控制画面。
图 9-4-1-3-1 激光/传感器控制画面(例:KE-2080)
(1) 控制单元
利用按钮来选择控制对象单元。
不受机器设置的“使用单元”设置的影响。(也可以选择不使用的单元)
(KE-2070/2070C)
(KE-2080/2080R)
第 2 部 功能详细编 第 9 章 手动控制
9-16
(2)设置项目
1)元件形状(可选择左 1~左 6 贴片头)
测量 SWEEP 时,请从组合框中选择激光识别用的元件形状。
选择测量 SWEEP 以外的控制项目,不能进行测量。
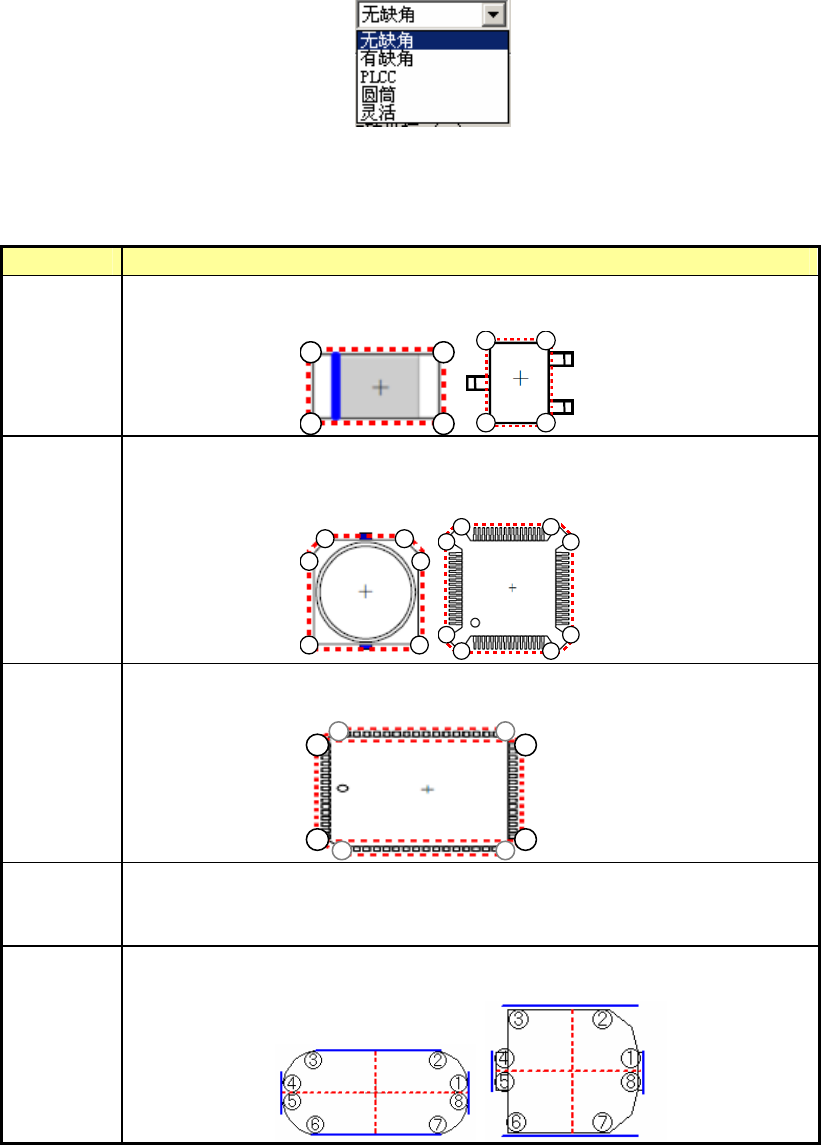
按下〔Alt〕+〔↓〕时,显示如下一览表。
图 9-4-1-3-2 元件形状组合框
表 9-4-1-3-1 元件形状
元件形状 动作
无缺角 根据测量数据检测出 4 个顶点,进行位置偏差、角度偏差的计算、校正。
对于无缺角,近似四边形形状的元件,可设置此种元件形状。
2
3
4
1
2
1
3
4
有缺角 根据测量数据检测出 5~8 个顶点,进行位置偏差、角度偏差的计算、校正。
元件中只要有 1 个缺角,以及 QFP 等在激光测量位置有引脚的元件,可设
置此种元件形状。
1
2
3
4
6
5
1
2
3
4
5
6
7
8
PLCC 根据测量数据检测出 8 个顶点,使用其中 4 个点进行位置偏差、角度偏差
的计算、校正。是 PLCC 专用的元件形状。
2
1
3
4
8
7
6
5
圆筒 根据测量的数据,计算位置偏差、角度偏差。角度偏差被忽略,测量结果
必为 0°。用于没有角的圆筒元件等。
相当于编辑生产程序时设置元件形状为圆筒。
灵活 从测量数据中抽出在 X、Y 方向上能构成元件最小幅度的附近 8 个点,计
算·校正位置偏差、角度偏差后,进行贴片。