KE-2070_80_80R_Instruction_Manual_Rev10_C.pdf - 第754页
第 2 部 功能详细编 第 9 章 手动控制 9-17 灵活 2 根据测量结果,检出元件的左右对称轴,从该轴取 得元件的中心坐标、 及角度偏差量, 进行贴片校正。 元件尺寸,根据上述计算测量出的角度偏差量,以 实际的元件角度 0 °为基础,把测量结果中最大的 幅度判断为 X 、 Y 。 如果元件存在多个对称轴, 因能取得元件的准确的中心 坐标,此形状会非常有效 (例:左图「○」元件)。 对称轴为1 个时,由于无法 取得元件的Y 方向的准…
第 2 部 功能详细编 第 9 章 手动控制
9-16
(2)设置项目
1)元件形状(可选择左 1~左 6 贴片头)
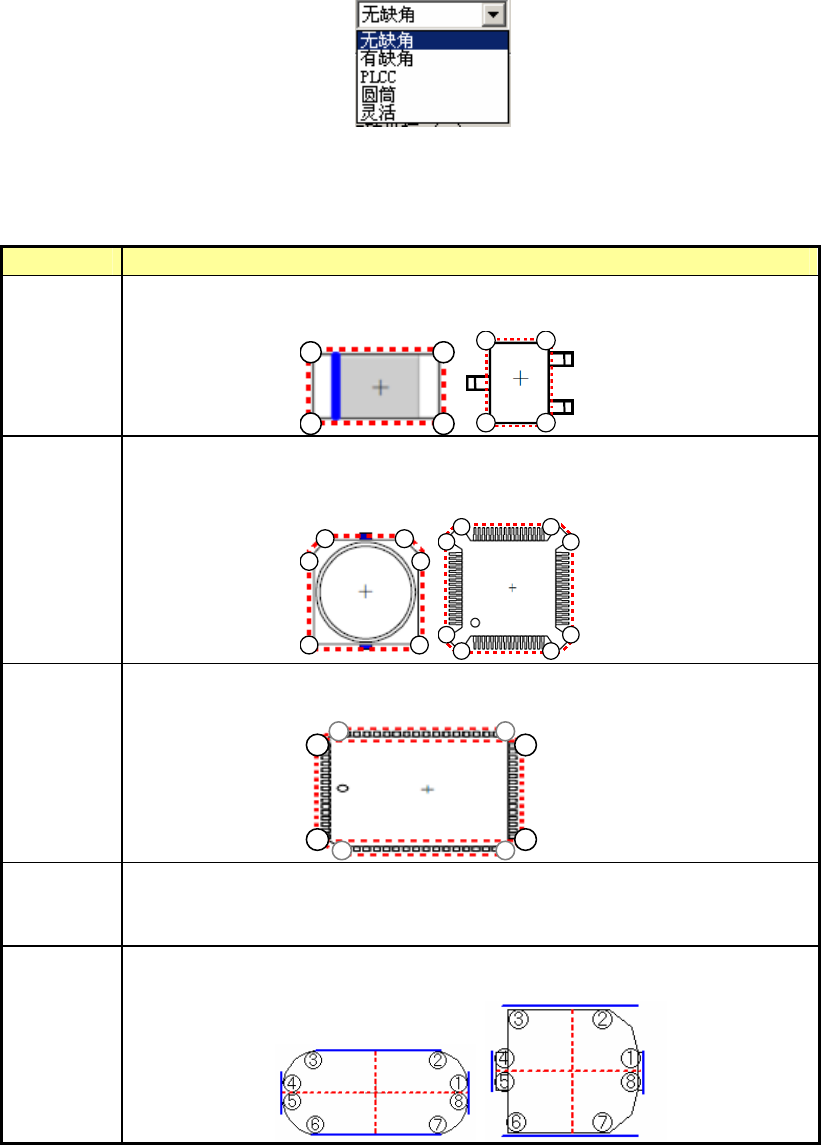
测量 SWEEP 时,请从组合框中选择激光识别用的元件形状。
选择测量 SWEEP 以外的控制项目,不能进行测量。
按下〔Alt〕+〔↓〕时,显示如下一览表。
图 9-4-1-3-2 元件形状组合框
表 9-4-1-3-1 元件形状
元件形状 动作
无缺角 根据测量数据检测出 4 个顶点,进行位置偏差、角度偏差的计算、校正。
对于无缺角,近似四边形形状的元件,可设置此种元件形状。
2
3
4
1
2
1
3
4
有缺角 根据测量数据检测出 5~8 个顶点,进行位置偏差、角度偏差的计算、校正。
元件中只要有 1 个缺角,以及 QFP 等在激光测量位置有引脚的元件,可设
置此种元件形状。
1
2
3
4
6
5
1
2
3
4
5
6
7
8
PLCC 根据测量数据检测出 8 个顶点,使用其中 4 个点进行位置偏差、角度偏差
的计算、校正。是 PLCC 专用的元件形状。
2
1
3
4
8
7
6
5
圆筒 根据测量的数据,计算位置偏差、角度偏差。角度偏差被忽略,测量结果
必为 0°。用于没有角的圆筒元件等。
相当于编辑生产程序时设置元件形状为圆筒。
灵活 从测量数据中抽出在 X、Y 方向上能构成元件最小幅度的附近 8 个点,计
算·校正位置偏差、角度偏差后,进行贴片。
第 2 部 功能详细编 第 9 章 手动控制
9-17
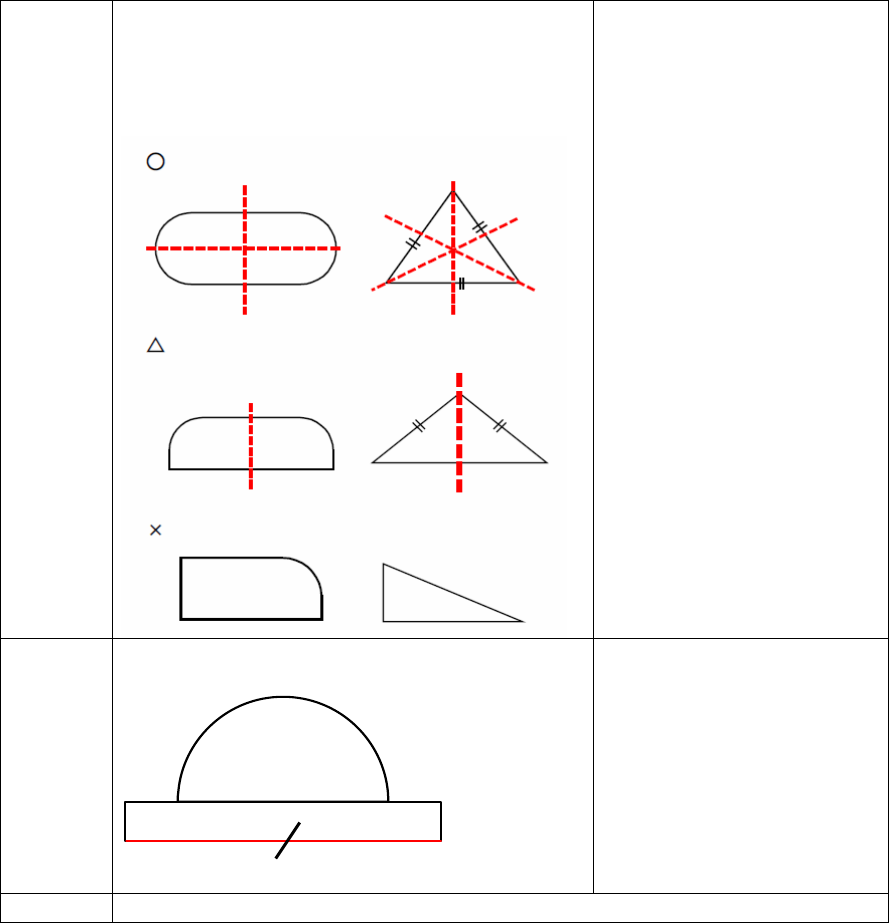
灵活 2 根据测量结果,检出元件的左右对称轴,从该轴取
得元件的中心坐标、及角度偏差量,进行贴片校正。
元件尺寸,根据上述计算测量出的角度偏差量,以
实际的元件角度 0°为基础,把测量结果中最大的
幅度判断为 X、Y 。
如果元件存在多个对称轴,
因能取得元件的准确的中心
坐标,此形状会非常有效
(例:左图「○」元件)。
对称轴为1 个时,由于无法
取得元件的Y 方向的准确的
中心坐标,有时会发生贴片
偏移(例:左图「△」元件)。
但是,由于此偏移量有再现
性,输入贴片偏移量的方法,
有时也可以使用。
如果元件没有对称性,此形
状无效(例:左图「×」元件)。
灵活 3 用元件的最小幅度附近的数据计算XY 的幅度、位
移量。从元件的 X 方向的 1 边的倾斜取得角度。
异形元件
可识别许多异形元件,但如
果元件的上下带有圆形,角
度偏移值会变得不稳定。
不设置 根据吸取姿势按贴片角度转动并贴片。
第 2 部 功能详细编 第 9 章 手动控制
9-18
2)测量方法(算法)(仅限于 KE-2080R 的右贴片头可以选择此项)
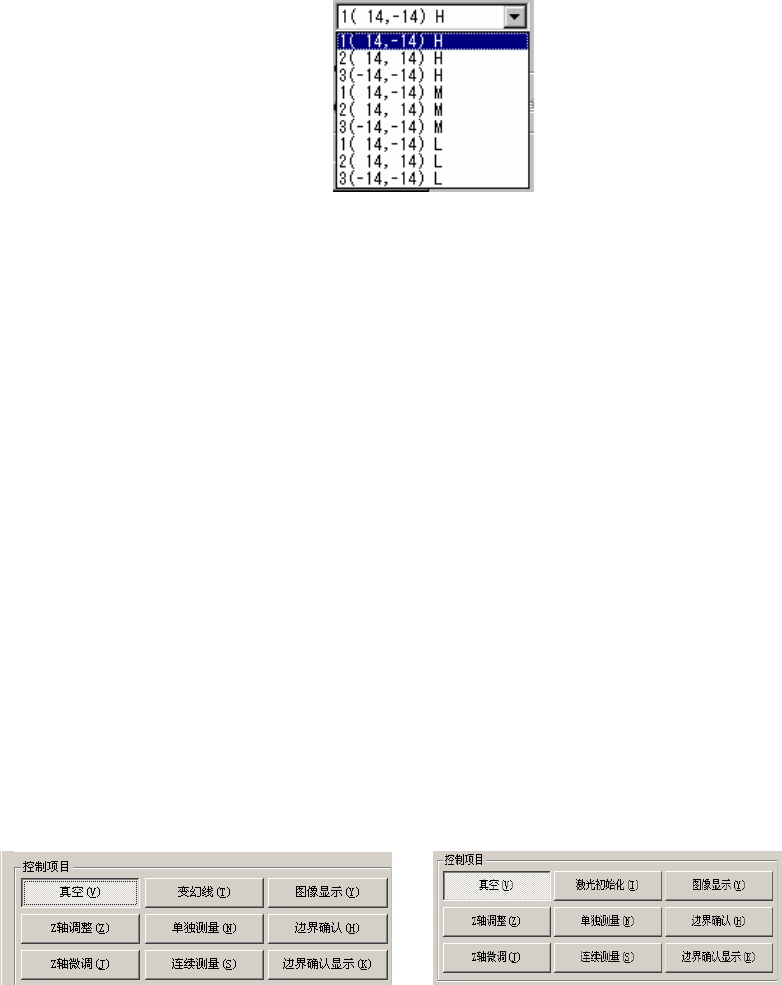
从组合框中选择执行[测量(SWEEP)]时的激光器算法。
按[Alt] + [↓] 键后,显示以下的列表。
算法,左侧显示的数字为算法,右侧的英文字母为 SWEEP 时的 旋转速度。
算法:
1(14、–14):在当前位置进行预旋转角度的逆旋转,在该位置旋转,找出影子宽度最小的位
置(第一次)。再从检测出的最小宽度位置起旋转 90 度,检测出第二个最小宽
度(第二次)。
相当于元件数据中设定的激光识别算法的算法 1。
2(14、 14):从当前位置进行预旋转角度的逆旋转,在该位置旋转,找出影子宽度最小的位
置(第一次)。再从检测出的最小宽度位置起旋转,检测出第二个最小宽度(第
二次)。
相当于元件数据中设定的激光识别算法的算法 2。
3(–14、–14):不旋转,在执行时的位置测量影子(第一次)。之后,在旋转后的位置测量
影子(第二次)。
相当于元件数据中设定的激光识别算法的算法 3。
速度: H:高速、M:中速、L:低速
(3)控制项目
选择左 1~左 6 贴片头时 选择 2080R 的右贴片头时