CP-6-series Mechanical Reference.pdf - 第236页
2. Placement Accuracy Measurement PAM, an acronym for Placing Accuracy Measurement, is a measurement procedure used to calculate and adjust the machine’s placing accuracy. Note: Use of the machine for long periods withou…
6. Select [SET] → [SERVO] to view the Z-axis motor pulse count and then manually
inch the Z-axis upwards until the dial gauge reads 0.3 mm.
7. Enter the resultant pulse count into Proper data.
[SET] → [PROPER] → [D1/D2/Z] → [ORIGIN] → [Zθ] → [SET].
8. Once the Zθ origin position has been registered at the machine side, ensure to
receive proper data to the host computer.
Note: When the machine is not in operation, there is nothing to prevent the XY-table damaging
the nozzle shaft at station 11. To avoid any unnecessary damage, always position the jig-
plate under station 11 when the cam angle is at 0°.
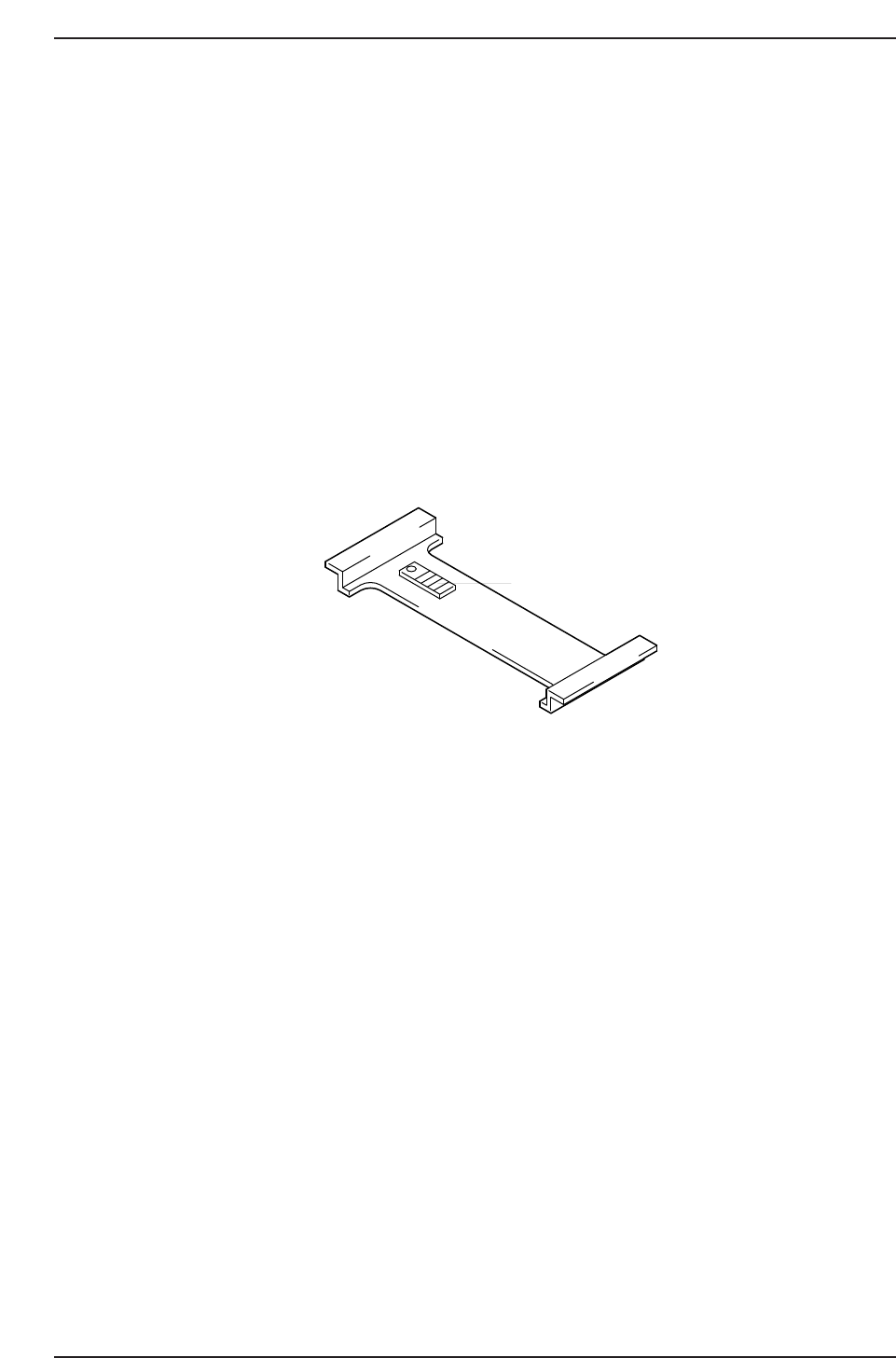
1.2 Zθ Adjustment (CP-643E)
Repeat the procedure for the CP-643E using the jig-plate below as opposed to the fiducial
jig-plate.
Note: The “-0.3 mm” spacer should be used for Z
θ
measurement
-0.3 mm
CP6M7003
Part 7 Chapter 1 Z-Axis Origin Position (Z
θ
)
Edition 1.5 7-1-2 CP-6-series Mechanical Reference
2. Placement Accuracy Measurement
PAM, an acronym for Placing Accuracy Measurement, is a measurement procedure used to calculate
and adjust the machine’s placing accuracy.
Note: Use of the machine for long periods without proper maintenance can reduce the original placing accuracy.
PAM can be used at such times to restore the placing accuracy to original levels.
PAM Kit
Please verify the contents of the PAM shipping container.
Overview
When PAM is started, a correction value for Station 11 (part placing station) Proper data
is calculated, and the ST11 Proper data is re-entered and saved in accordance with this
correction value. This data is also transmitted back to the host computer (F4G or MCS).
This ST11 Proper data acts to correct mechanical positional error (due to working and
mounting error amounts), resulting in a uniform correction. X and Y direction correction
values are entered for each nozzle. As the system consists of 20 heads with 6 nozzles per
head, this results in a total of 240 Proper data input items.
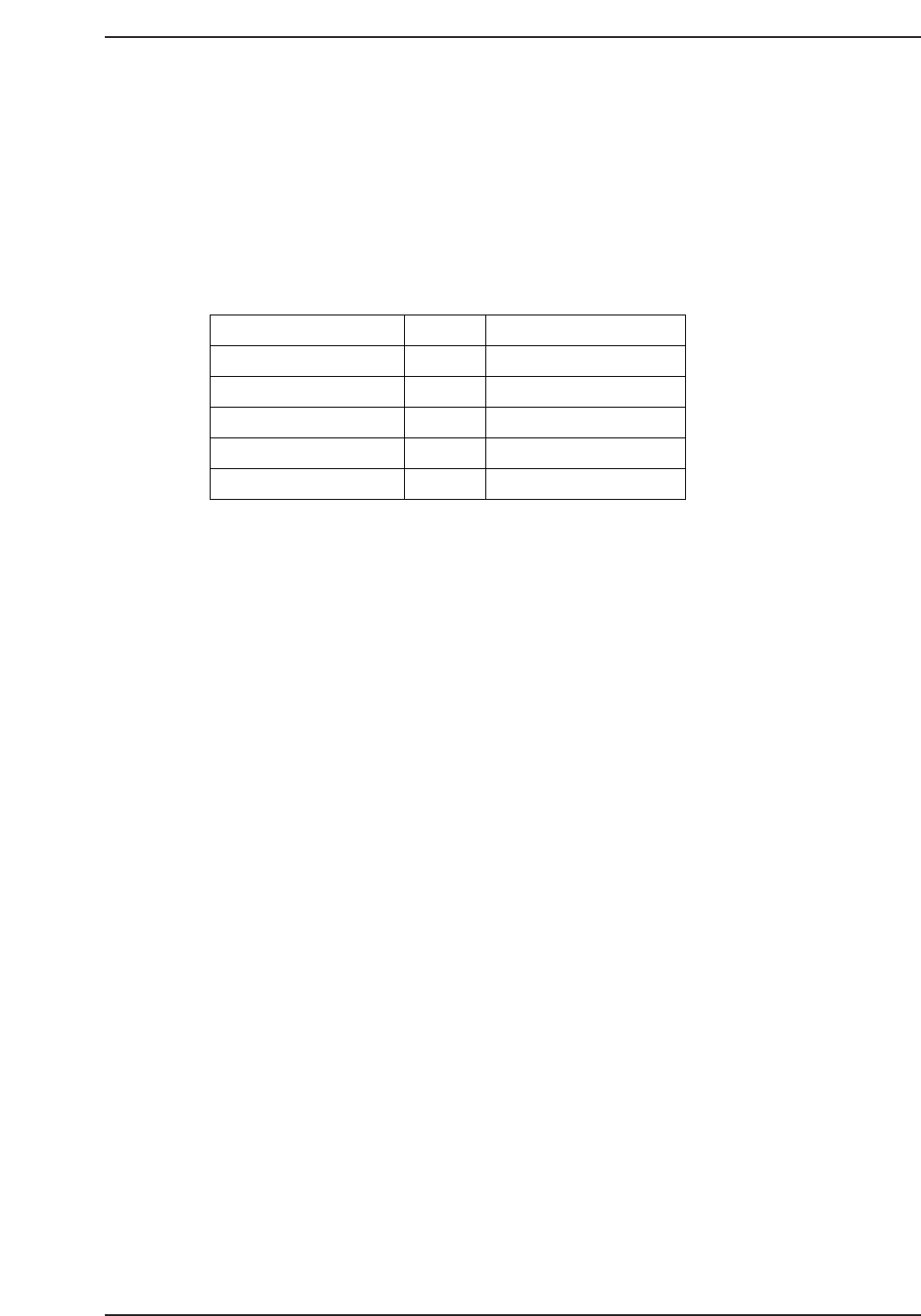
Item Name Quantity Model
Dummy parts for PAM 1 reel MPJ2220
Board for PAM 1 board K2096E(CP/IP/QP96-001)
Program FD disk for PAM 1 disk
Card ROM for PAM 1 card
Double-sided tape 1 roll Scotch Tape 666 25.4
CP6M7004
Part 7 Chapter 2 Placement Accuracy Measurement
Edition 1.0 7-2-1 CP-6-series Mechanical Reference
2.1 The Need for Station 11 Proper Data Calibrations
Corrections in Station 11 Proper data are required to counter the mechanical deviation of
each nozzle at Station 11.
Although it is possible to measure the nozzle centers of Station 6 with the parts camera, it
is impossible to measure the centers at Station 11. The placement position of parts will
be inaccurate without compensating for these mechanical deviations because, it is
impossible for each nozzle to stop at the exact same point.
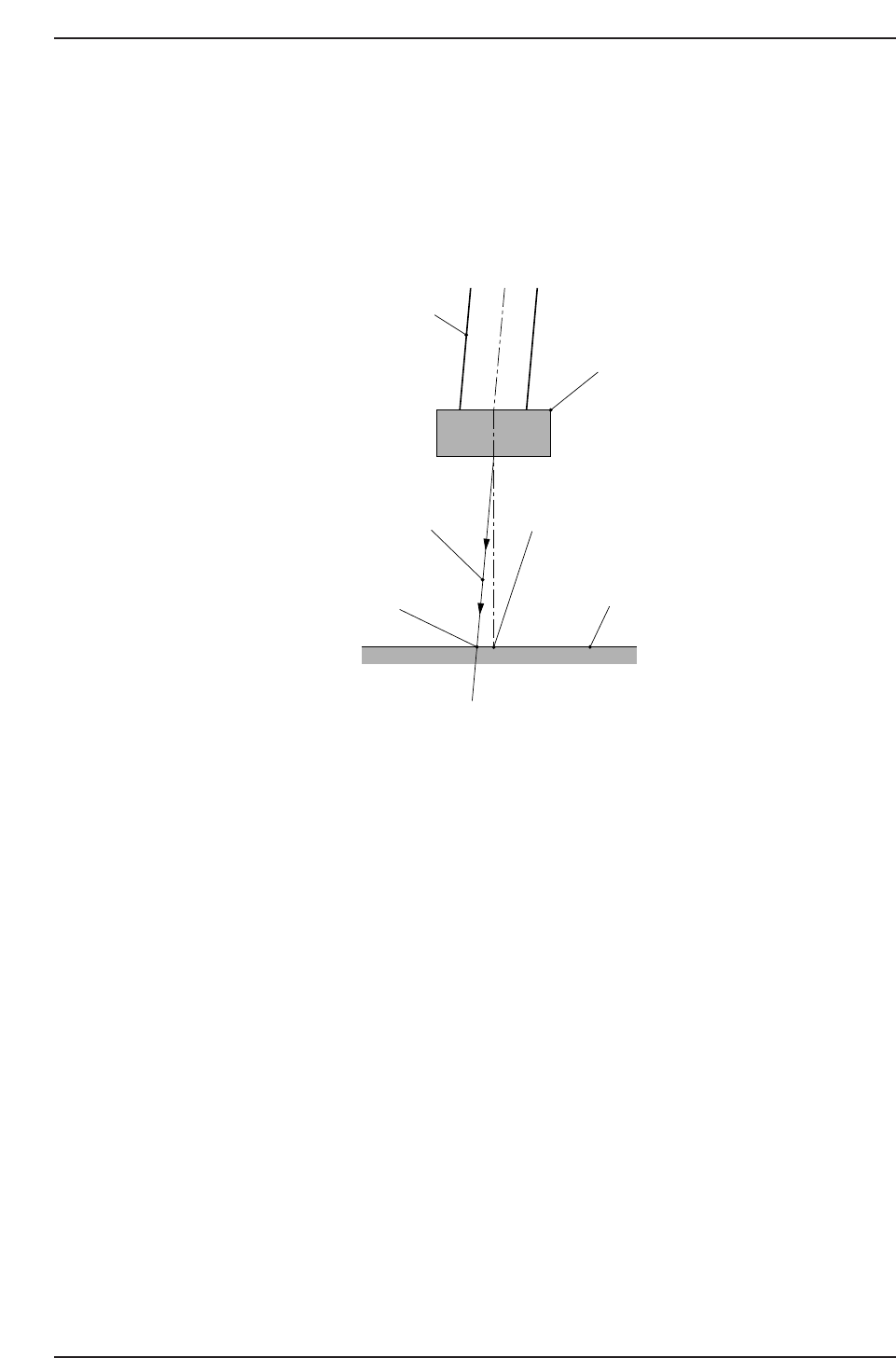
As shown in this illustration, when a nozzle cannot move in a completely vertical
direction due to mechanical errors, the center of a part, as seen by the vision processing
system, and the actual center may not correlate.
The measurement performed by PAM involves a process in which dummy chips are
actually placed on a mark reference board, with the chip placement accuracy being
checked by a mark camera. Each nozzle is rotated to 0 degrees, 90 degrees, 180 degrees
and 270 degrees and the vision processing data for the placed parts then undergoes
statistical processing to provide an accurate measurement of the mechanical error
amount.
Nozzle
Decending
trajectory
Board
Part center detected
by Vision Processing
Part center
at placement
Part
CP6M7005
Part 7 Chapter 2 Placement Accuracy Measurement
Edition 1.0 7-2-2 CP-6-series Mechanical Reference