CP-6-series Mechanical Reference.pdf - 第245页
Notes: The deviation in the placement position is corrected by correcting the Proper data. Attempts to perform a 100% correction will result in an over-correction, and will cause an even greater deviation (overshoot). Th…
6. Placing Dummy Parts
After initializing all heads, end the editor command mode, then use the placing
commands to place the parts.
1. Press [RETURN] to return to the initial screen.
2. Select [PAM] —> [PLACE].
3. Press the START button.
4. Press the START button again to begin part placement.
7. Dummy Parts Measurement
After the dummy parts have been placed, use the measurement command to measure
them with the board still on the XY-table. This procedure consists of measuring the
amount of deviation from the program coordinate values (nozzle center measurement
values).
1. Select [MEASUREMENT]
The XY-table begins to move, and the fiducial mark camera acquires images of the
actual positions where the parts have been placed. This is followed by statistical
processing.
2. Deviation display
i) Select the following commands:
[EDITOR] —> [NOZZLE TYPE] —> [SELECT NZL]
(select the number of the nozzle being measured)
ii) Check the Avg. dx, and dy values.
Note: A correction is required if the deviation exceeds 10 (0.1).
3. Proper data correction
The following is the correction procedure which must be performed at placing
heads where the deviation (Avg. dx, dy) exceeds 10.
i) When the Avg. dx, and dy values exceed 10, add half their value to the
Proper X, Y values.
Example:
Proper X
6
Proper X
12
Proper Y
-7
Proper Y
-15
Avg.dx
12
Avg.dy
-16
CP6M7008
Part 7 Chapter 2 Placement Accuracy Measurement
Edition 1.0 7-2-9 CP-6-series Mechanical Reference
Notes: The deviation in the placement position is corrected by correcting the Proper data.
Attempts to perform a 100% correction will result in an over-correction, and will cause
an even greater deviation (overshoot). Therefore, only 1/2 of the calculated value
should be added (never add the full value).
ii) If the deviation (Avg. dx, dy) is 10 or less,, repeat Step 6 “Placing Dummy
Parts” to the end of Step 7 “Dummy Parts Measurement” procedure shown
above.
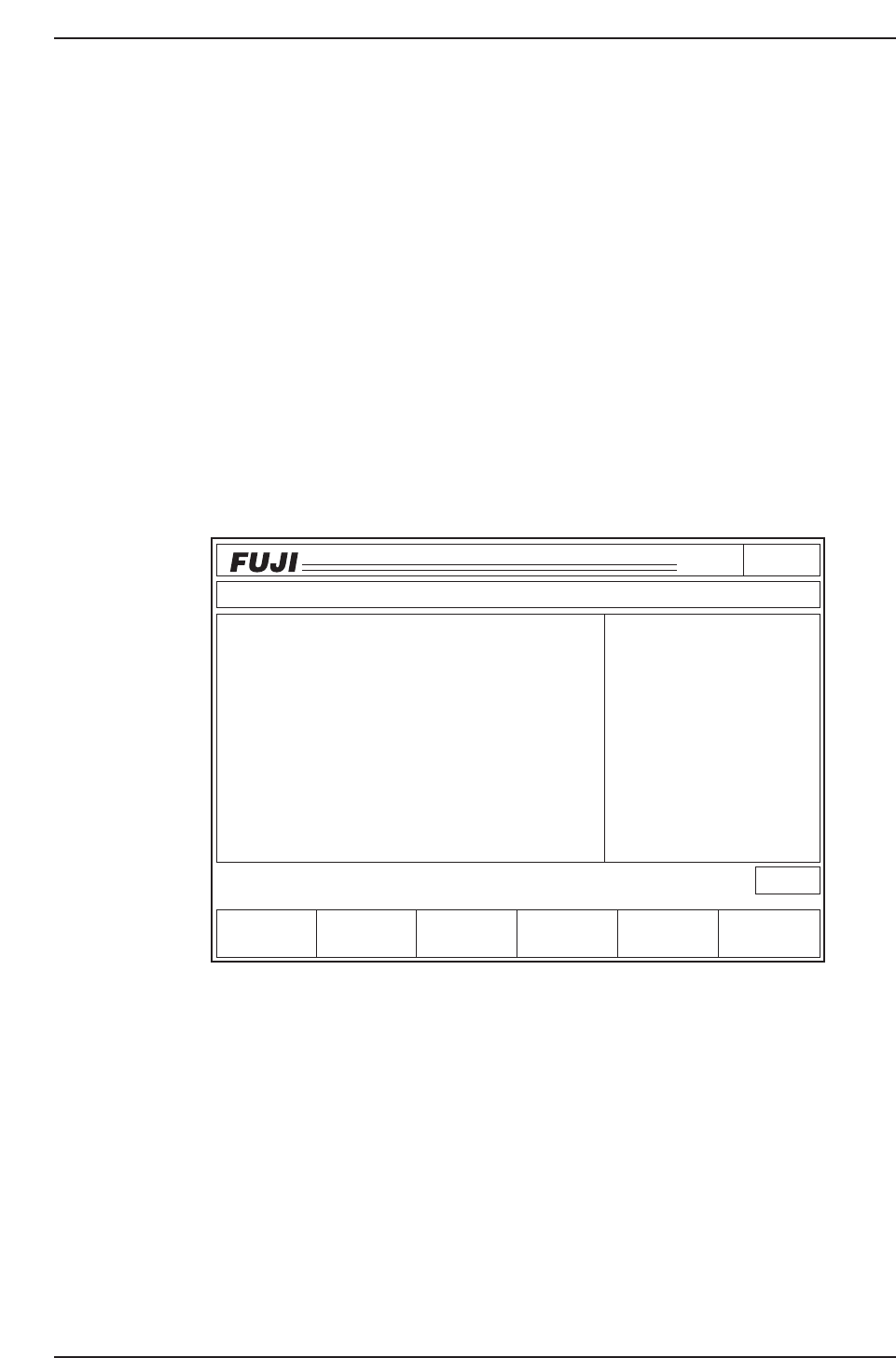
8. Results Display
9. Sig. X, Y, Q (3-Sigma) Check
1. Select the [RESULTS] command.
2. The correction procedure is complete if all the sig. X, Y, Q values are 100 or less. If
any values exceed 100, repeat Step 6 “Placing Dummy Parts”, then check the sig.
X, Y, Q values again.
3. Select the [DATA SAVE] command.
Continue with the Proper data corrections for all the other nozzles.
Page141
CP_6.PROGRAM
000000000000
000000000000
Prod 00000 Sche 00000
P1.00 off line
Operation : Front
Ready
RETURN
jog
XY
C
SIZE
PRINT
Avg.dX
- 13
Max.dX
26
Max.dX
- 13
3sig.X
- 18
Avg.dQ
- 278
Max.dQ
476
Max.dQ
- 278
3sig.Q
483
- 9
Avg.dY
19
Max.dY
- 9
Max.dY
4
3sig.Y
Data Display
Measurement Result
Nozzle Type
All Nozzle
All degrees
All data
5000
dXdY
[1/1000mm]
dQ
[1/1000deg]
CP6M7009
Part 7 Chapter 2 Placement Accuracy Measurement
Edition 1.0 7-2-10 CP-6-series Mechanical Reference

10. Transmitting Proper Data From Machine to Host
Transmit (and back-up) the Proper data from the machine to the host (F4G or MCS).
This completes the ST11 Proper data adjustments using PAM.
Tolerance range
After the PAM measurement is completed, the following information can be output (to
the printer if connected) for all number 1 to 6 nozzles: deviation amount, deviation
average, max./min. deviation, accuracy result.
Fuji guarantees a CP-6 placing accuracy of ±0.1 mm. However, because machine
efficiency can vary due to maintenance and operating conditions, it is impossible to
group all machines into one tolerance range. Keep this in mind when deciding the best
placing accuracy for your specific machine in order to obtain better results from the
calibration process.
2.7 Placing Accuracy Verification
1. Use a mark reference board to adjust the ST11 Proper data.
2. With the Proper data set (step 1 above), perform the part placement and
measurement operations using a pin reference program. Verify that the accuracy
is acceptable.
Part 7 Chapter 2 Placement Accuracy Measurement
Edition 1.0 7-2-11 CP-6-series Mechanical Reference