CP-6-series Mechanical Reference.pdf - 第266页
4.3 Adjustment of the Stop Sensor W arning Turn off the 200 V servo power before carrying out this work. There are rising and lowering stop sensors. These sensors are installed on the IN-side and OUT-side elevators, and …
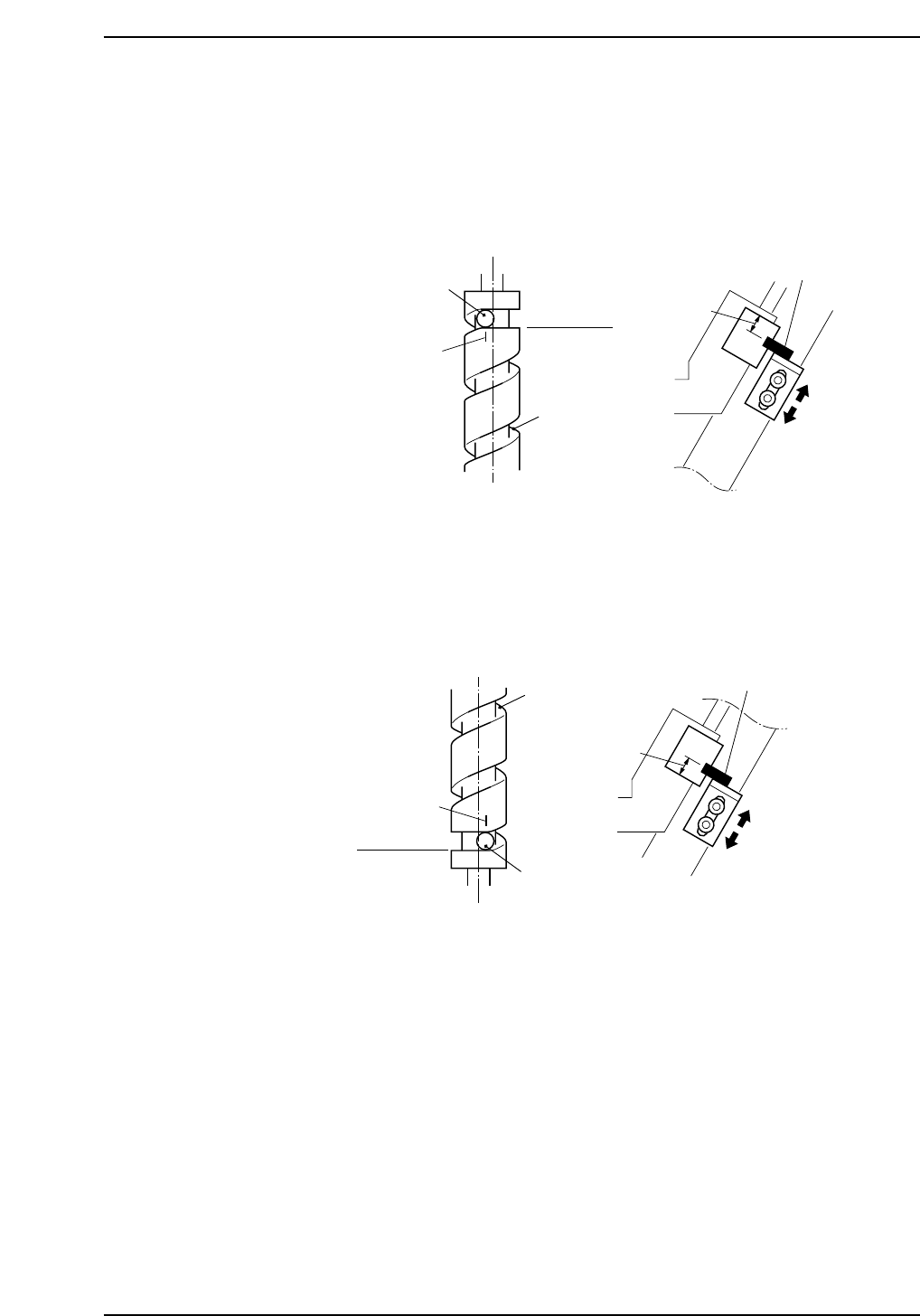
1. Perform inching to raise the lifter.
2. Stop operation before the lifter reaches its highest position.
3. While monitoring the position of the cam follower moving within the groove on
the ball screw, raise the lifter further.
4. Stop the lifter when the cam follower reaches the horizontal (flat) surface of the
cam groove.
5. At this point, adjust the position of the upper deceleration sensor so that the
distance from the center of the sensor to the upper edge of the dog is 17.0 mm.
6. Next, lower the lifter to its lowest position and adjust the lower deceleration
sensor using the same procedure as for the upper deceleration sensor.
17.0 mm
Ball screw
Cam follower
Position where stopped
Flat surface
Cam groove
Lower deceleration sensor
CP6M9024
17.0 mm
Ball screw
Cam follower
Position where stopped
Flat surface
Cam groove
Upper deceleration sensor
CP6M9023
Part 8 Chapter 4 Elevators
Edition 1.0 8-4-3 CP-6-series Mechanical Reference
4.3 Adjustment of the Stop Sensor
Warning
Turn off the 200 V servo power before carrying out this work.
There are rising and lowering stop sensors.
These sensors are installed on the IN-side and OUT-side elevators, and should be
adjusted in the same way.
Before attempting adjustment, remove the covers in the area of the sensors as well as the
stop sensors themselves.
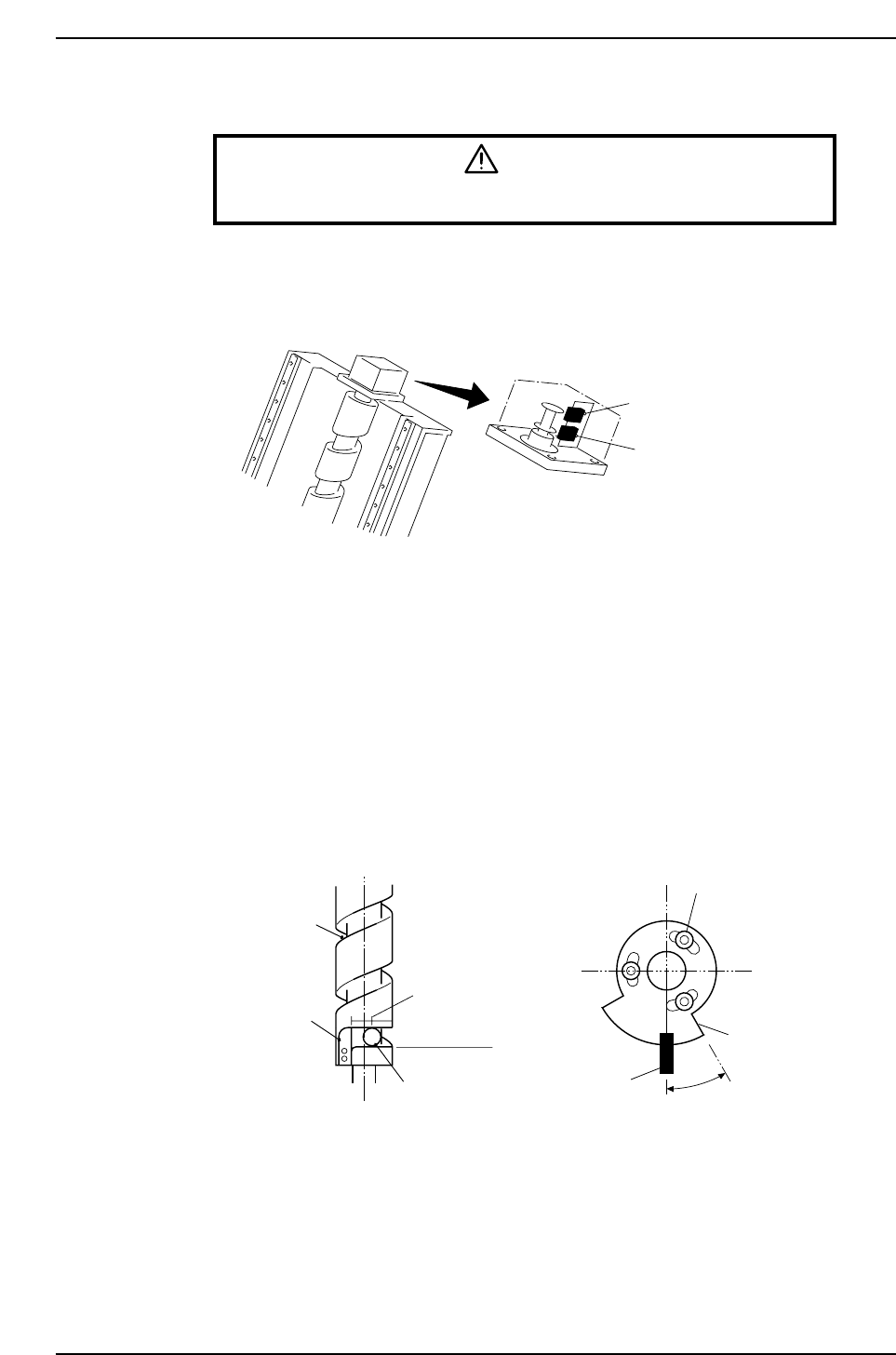
Adjust the lowering stop sensor first.
1. Perform inching to lower the lifter.
2. Stop operation before the lifter reaches its lowest position.
3. While monitoring the position of the cam follower moving within the groove on
the ball screw, lower the lifter further.
4. The cam follower reaches the horizontal (flat) surface of the cam groove.
Stop the lifter at a point intermediate between this position and the stopper.
The flat surface described here refers to the surface that is perpendicular to the ball
screw.
30°
CP6M9026
Worm camshaft
Cam groove
Stopper
Position
where stopped
Flat surface
Cam follower
Bolt
Dog
Lowering stop
sensor
Lowering stop sensor
Rising stop sensor
CP6M9025
Part 8 Chapter 4 Elevators
Edition 1.0 8-4-4 CP-6-series Mechanical Reference
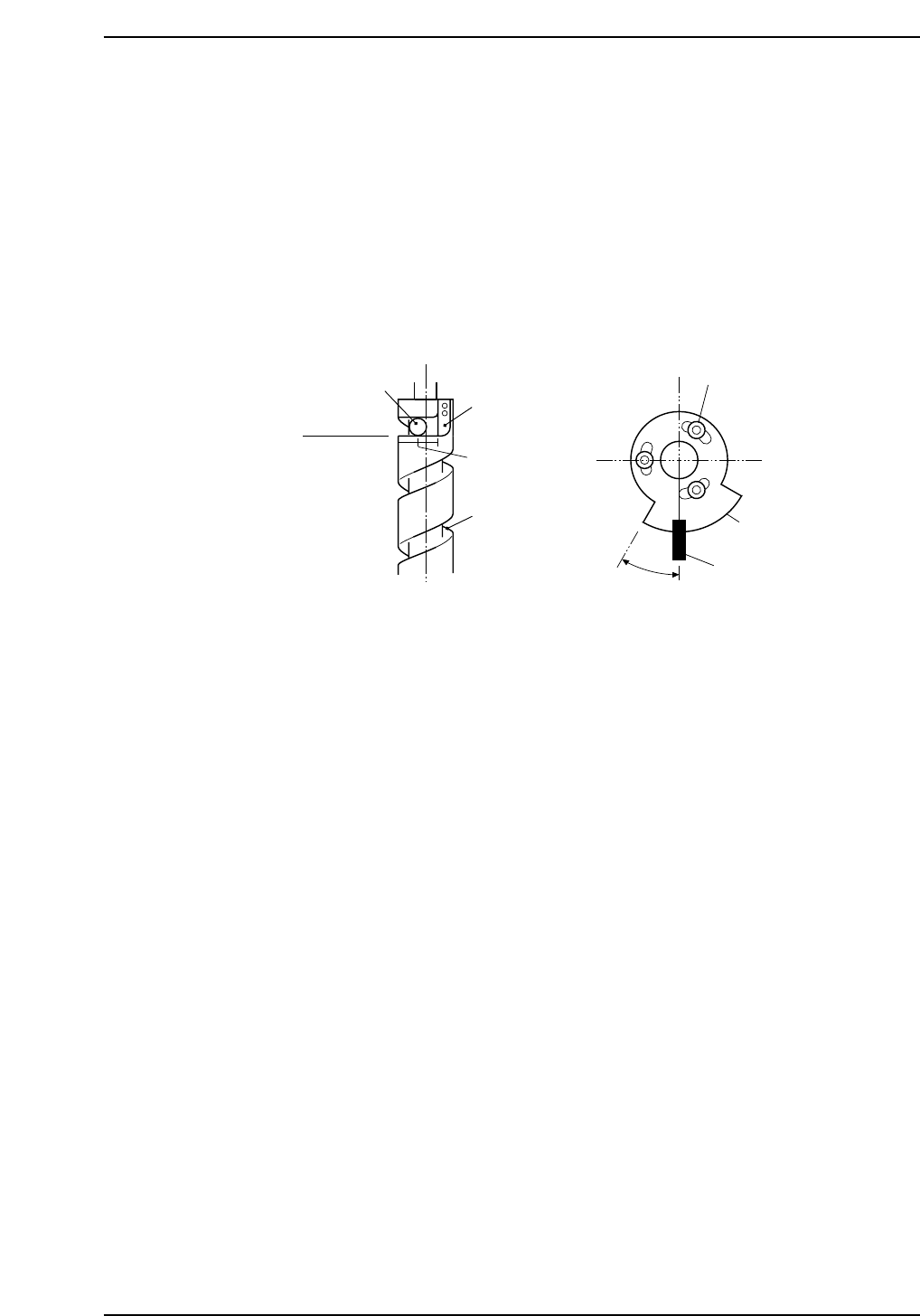
5. Mount the lowering stop sensor at this position, adjust the position of the dog so
that the relationship shown in the figure above is obtained, and secure in place
with the bolt.
6. Next, perform inching to raise the lifter.
7. Stop operation before the lifter reaches its highest position.
8. While monitoring the position of the cam follower moving within the groove on
the ball screw, raise the lifter further.
9. The cam follower reaches the horizontal (flat) surface of the cam groove.
Stop the lifter at a point intermediate between this position and the stopper.
The flat surface described here refers to the surface that is perpendicular to the ball
screw.
10. Mount the rising stop sensor at this position, adjust the position of the dog so that
the relationship shown in the figure above is obtained, and secure in place with
the bolt.
30
Ball screw
Cam groove
Stopper
Position
where stopped
Flat surface
Cam follower
Bolt
Dog
Rising stop sensor
°
CP6M9027
Part 8 Chapter 4 Elevators
Edition 1.0 8-4-5 CP-6-series Mechanical Reference