DEUKYX-193-3100_G5S2_VOL3.pdf - 第107页
DEUKYX 1-53 193-3100 5.1 1 Head Cntr Mark Pos n Kopf-Rotationsachsenoffset Xm(+) Ym(+) Kopf-Rotationsachsenzentrum PEC Erkennungskamerazentrum Xm-Ym: Maschinenreferenz Koordinatensystem Pm. Maschinenreferenz-Koordi- nate…
DEUKYX
1-52193-3100
5.11 Head Cntr Mark Pos
n
Teaching-Lehre
Für das Teachen der Offsets des Kopfrotationszentrums und der
Markenreferenzposition wird die QFP-Glaslehre JG-0188 (KYB-M381P-00)
verwendet.
n
Lehren-Aufnehmer
Für die Aufnahme der QFP-Glaslehre wird der Lehren-Aufnehmer
(Standardzubehör) oder der Aufnehmer HV19C verwendet.
n
Teaching-Verfahren
Vorgehensweise
(1) Wechsel Sie vor dem Teachen zum Lehren-Aufnehmer und richten Sie die
QFP-Glaslehre in ihrer Position oberhalb der Bauteilerkennungskamera ein.
(2) Wählen Sie den Kopf (1, 2 oder All), für die das Teachen der Offsets des
Rotationsachsenzentrums und der Marken-Referenzposition erfolgen soll.
Hinweis
Wurde unter "Select Head" ein Multifunktionkopf ausgewählt, wählen Sie
den zu teachenden Aufnehmer und drücken Sie [Teach Start].
(3) Drücken Sie in der Registerkarte "Head Cntr" auf [Teach Start].
(Das Teachen des Offsets des Kopf-Rotationszentrums beginnt.)
Hinweis
• Während die Maschine angehalten ist, steht keine andere Menüoption
zur Verfügung.
•
Ist das Teachen beendet, fährt der Kopf automatisch zurück in seine
Nullposition.
Die Ergebnisse werden im "Head Cntr Teaching"-Fenster angezeigt.
(4) Drücken Sie in der Registerkarte "Mark Pos" auf [Teach Start].
(Das Teachen des Offsets der Referenzmarke beginnt.)
Hinweis
• Während die Maschine angehalten ist, steht keine andere Menüoption
zur Verfügung.
• Ist das Teachen beendet, fährt der Kopf automatisch zurück in seine
Nullposition. Die Ergebnisse werden im "Mark Pos Teaching"-Fenster
angezeigt.
(5) Ist das Teachen beendet, entfernen Sie die QFP-Glaslehre.
(6) Drücken Sie [Save].
(Wird diese Taste gedrückt, werden die Teaching-Ergebnisse gespeichert.)
DEUKYX
1-53193-3100
5.11 Head Cntr Mark Pos
n
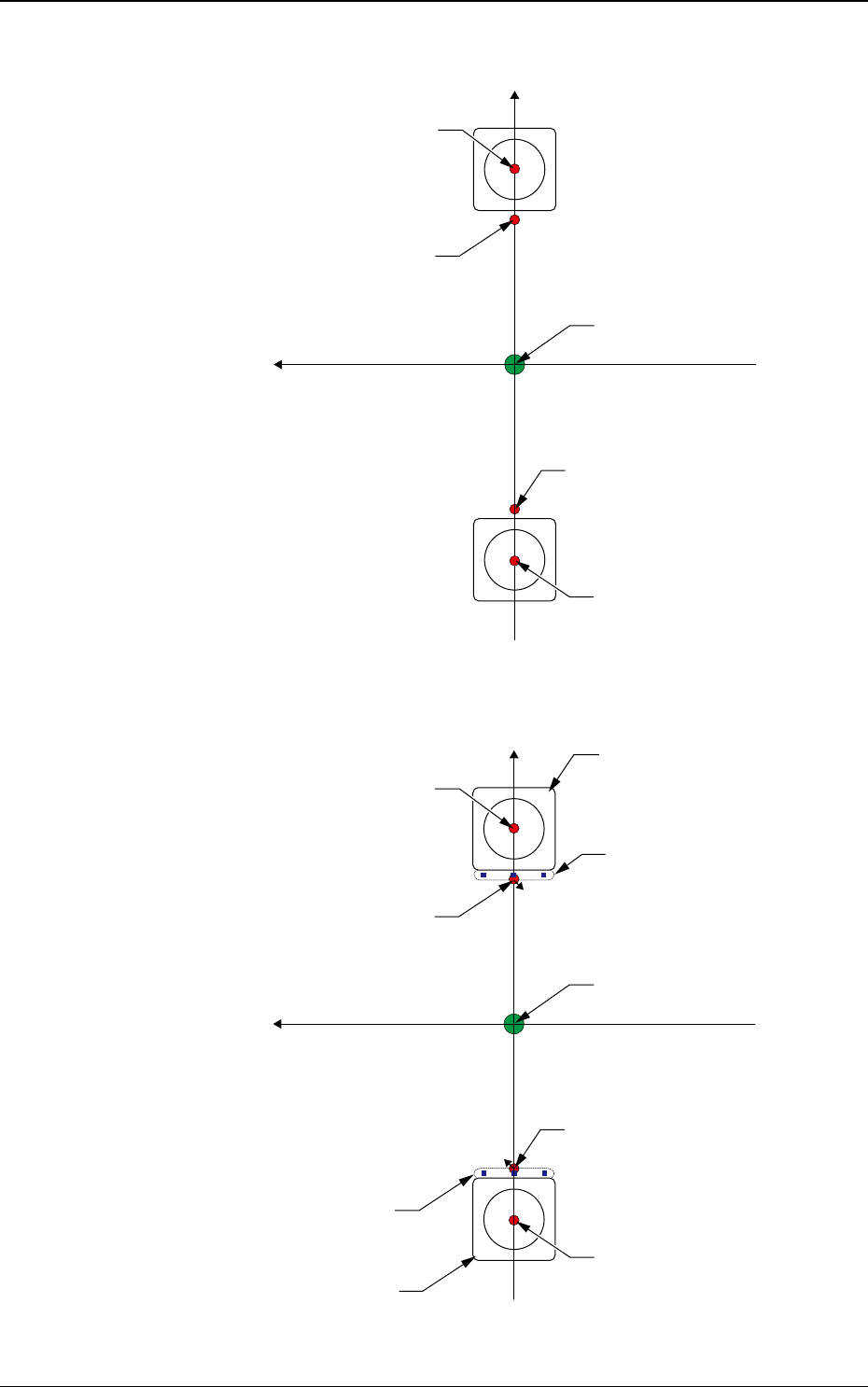
Kopf-Rotationsachsenoffset
Xm(+)
Ym(+)
Kopf-Rotationsachsenzentrum
PEC Erkennungskamerazentrum
Xm-Ym: Maschinenreferenz
Koordinatensystem
Pm. Maschinenreferenz-Koordi-
natenursprung
PEC Erkennungskamerazentrum
Kopf-Rotationsachsenzentrum
F3A41
n
Referenzmarkenoffset
Xm-Ym: Maschinenreferenz
Koordinatensystem
Xm(+)
Ym(+)
Bauteil-Erkennungskamera
Kopf-Rotationsachsenzentrum
PEC Erkennungskamerazentrum
Referenzmarken-
Bauteilerkennung
Kamera
Kopf-Rotationsachsenzentrum
PEC Erkennungskamerazentrum
Pm. Maschinenreferenz
Koordinatenursprung
Referenzmarken-
F3A42
DEUKYX
1-54193-3100
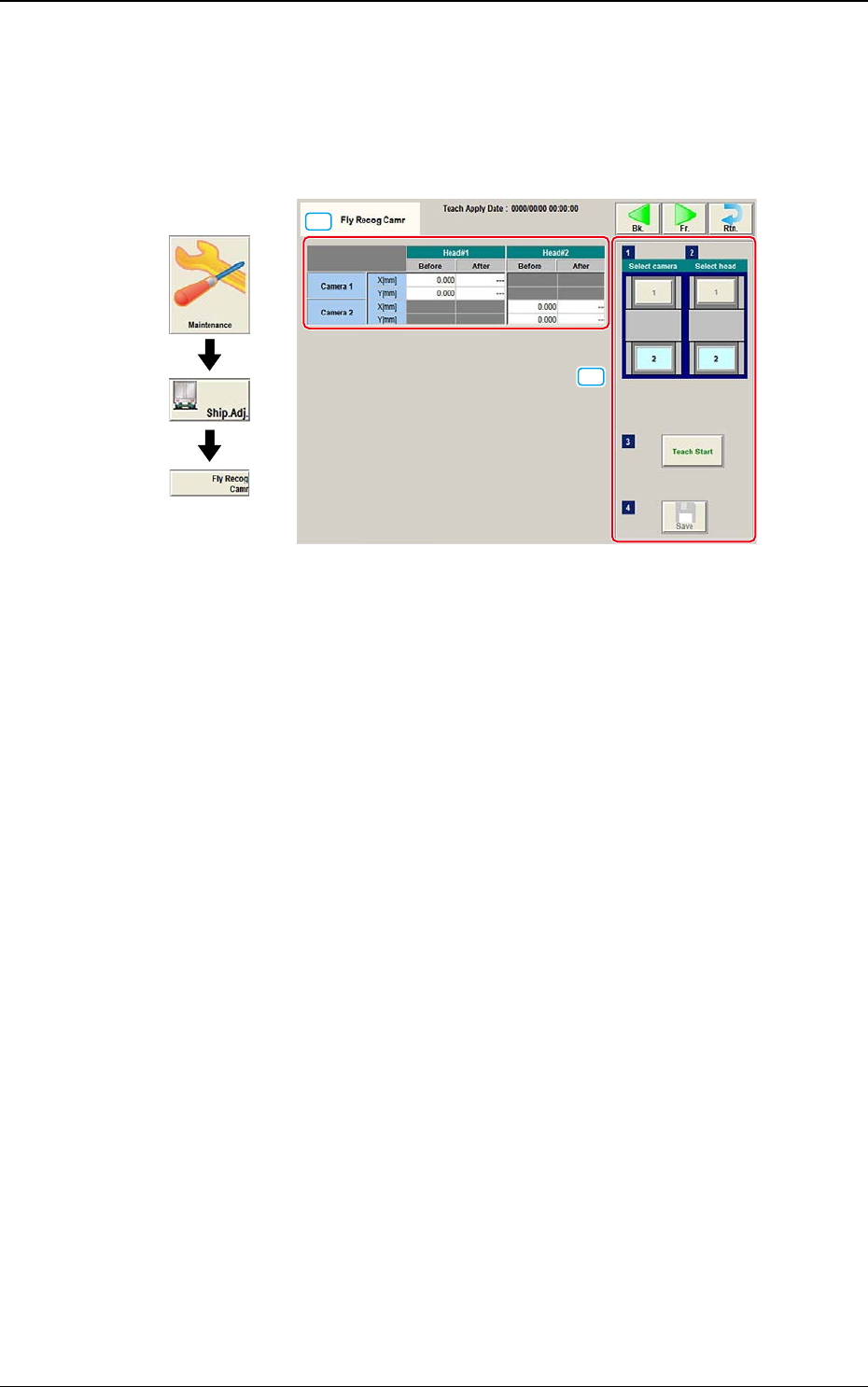
5.12 Fly Recog Camr
5.12 Fly Recog Camr
Die eingestellten Parameter werden verwendet, um zu verhindern, dass ein Bauteil
von der Verzögerung beeinusst wird und außerhalb des Sichtfelds der Kamera
bleibt.
Grafischer
Ablauf
[1]
[2]
F3A43
[1] Teaching-Datenanzeige
Hier werden die Offsetdaten der ausgewählten Kamera angezeigt.
[2] Teaching-Funktionen
Die folgenden Schaltächen werden für die Teaching-Funktionen verwendet.
Select camera
Wählen Sie die Kamera, für die das Teaching durchgeführt werden soll.
Select head
Wählen Sie den Kopf, für den das Teaching durchgeführt werden soll.
[Teach Start]-Taste
Startet das Teachen.
[Save]-Taste
Die Teaching-Ergebnisse werden gespeichert.