DEUKYX-193-3100_G5S2_VOL3.pdf - 第196页
DEUKYX 2-28 193-3100 2.4 Beam [3] Rectangular Angle X [deg] Diese Parameter repräsentieren den Betrag der Winkelabweichungen (X-Richtungen) der Marke auf der Maschine im Ve rgleich zu der X-Richtung im Referenzkoordinate…
DEUKYX
2-27193-3100
2.4 Beam
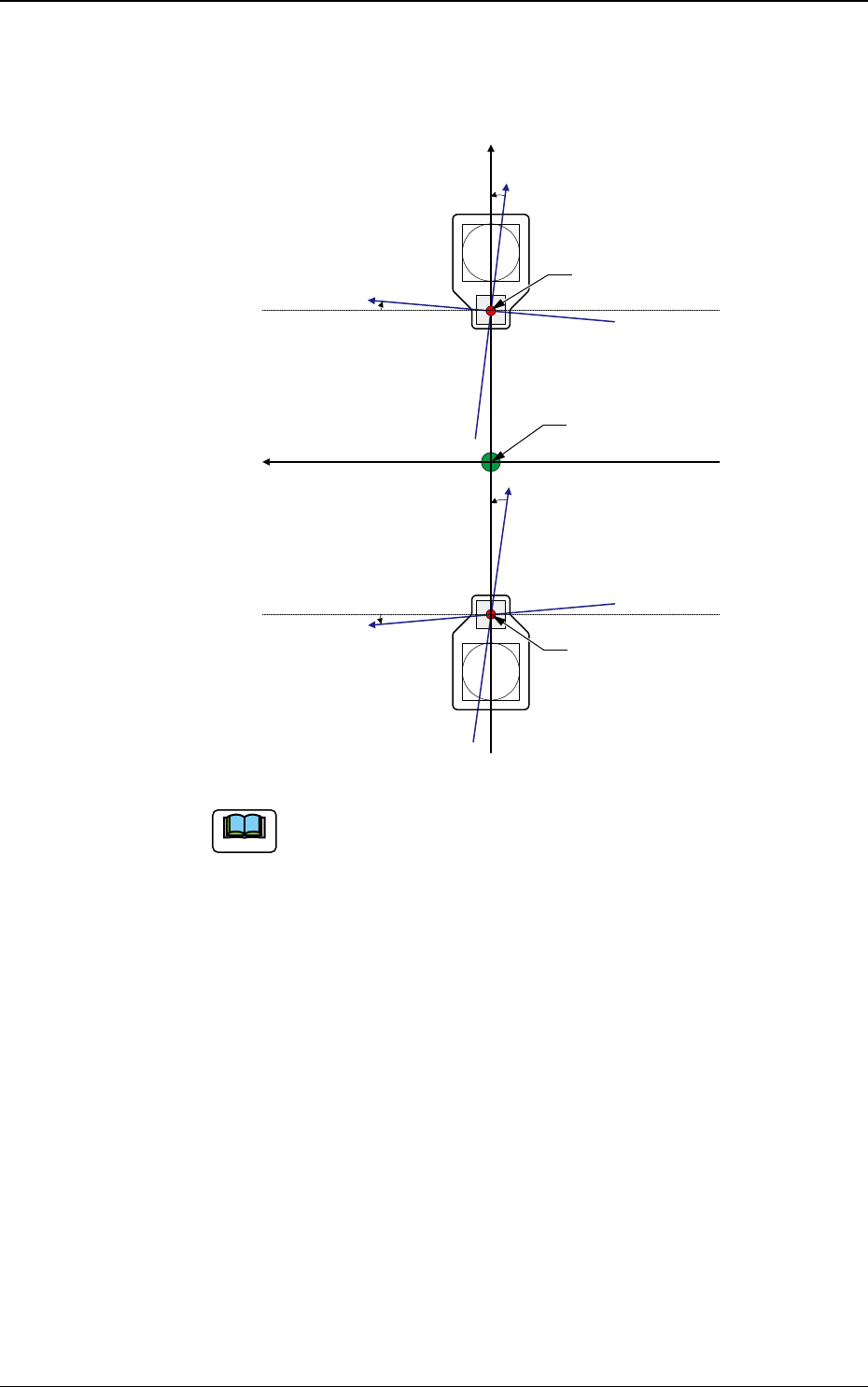
[2] Angle X und Angle Y [deg]
Die Parameter korrigieren die X- und Y-Achse der Kopfeinheit (Beam) zum
Maschinen-Referenzkoordinatensystem.
Xm(+)
Ym(+)
Yb(+)
Xb(+)
Yb(+)
Xb(+)
Xm-Ym : Maschinenreferenzkoor
dinatensystem
Xb-Yb : Kopfeinheit (Beam)
Koordinate
Kopfnullpunkt
Pm. Maschinenreferenz
Koordinatenursprung
Kopfnullpunkt
F3B27
Hinweis
In den Textfeldern "Angle X [deg]" und "Angle Y [deg]" müssen Pluswerte
eingegeben werden, wenn das reale Kopfeinheit-Koordinatensystem
entgegen dem Uhrzeigersinn gekippt ist (in Bezug auf das Maschinen-
Referenzkoordinatensystem).
DEUKYX
2-28193-3100
2.4 Beam
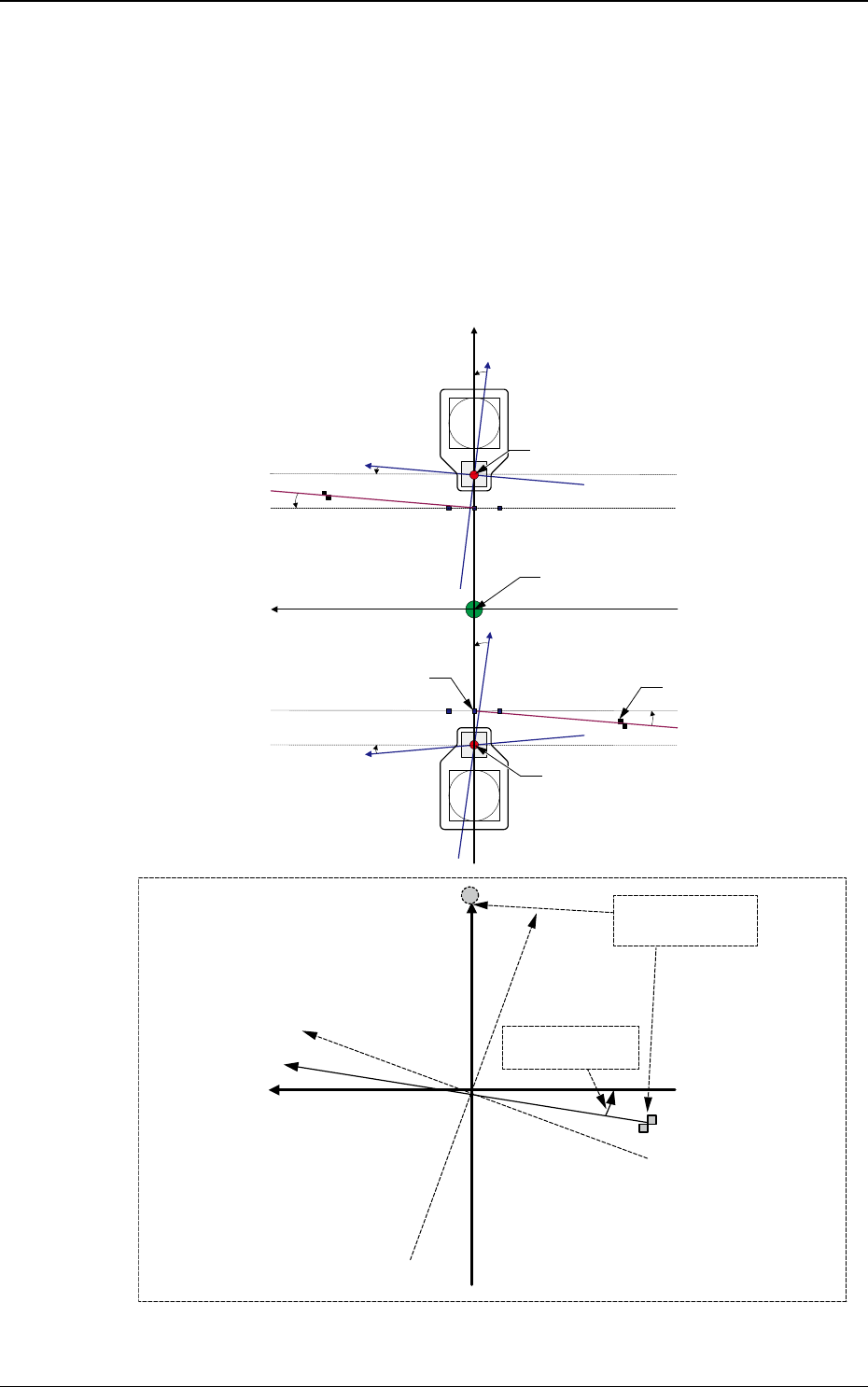
[3] Rectangular Angle X [deg]
Diese Parameter repräsentieren den Betrag der Winkelabweichungen
(X-Richtungen) der Marke auf der Maschine im Vergleich zu der X-Richtung
im Referenzkoordinatensystem der Maschine.
Die Parameter werden verwendet, um die drei Marken im Maschinenbereich
zu überprüfen, an denen nur geringfügige Positionsänderungen in
Abhängigkeit von den Temperaturänderungen entstehen, und die X /
Y-Achsen der Kopfeinheit (Beam) so einzustellen, dass sie im rechten
Winkel aufeinander stehen.
Xm(+)
Ym(+)
Yb(+)
Xb(+)
Yb(+)
Xb(+)
Xm'
Xm-Ym : Maschinenreferenzkoor
dinatensystem
Xb-Yb : Kopfeinheit (Beam)
Koordinatensystem
Kopfnullpunkt
Pm. Maschinenreferenz-Koordinatenur-
sprung
Referenzmarke 2
Kopfnullpunkt
Referenzmarke 1
Marke auf
Maschine
Maschinenreferenzkoor-
dinatensystem
Rectangular Angle
X [deg]
Markenkoordinaten
system
heit(Beam)-Koordinat-
ensystem
F3B28
DEUKYX
2-29193-3100
2.4 Beam
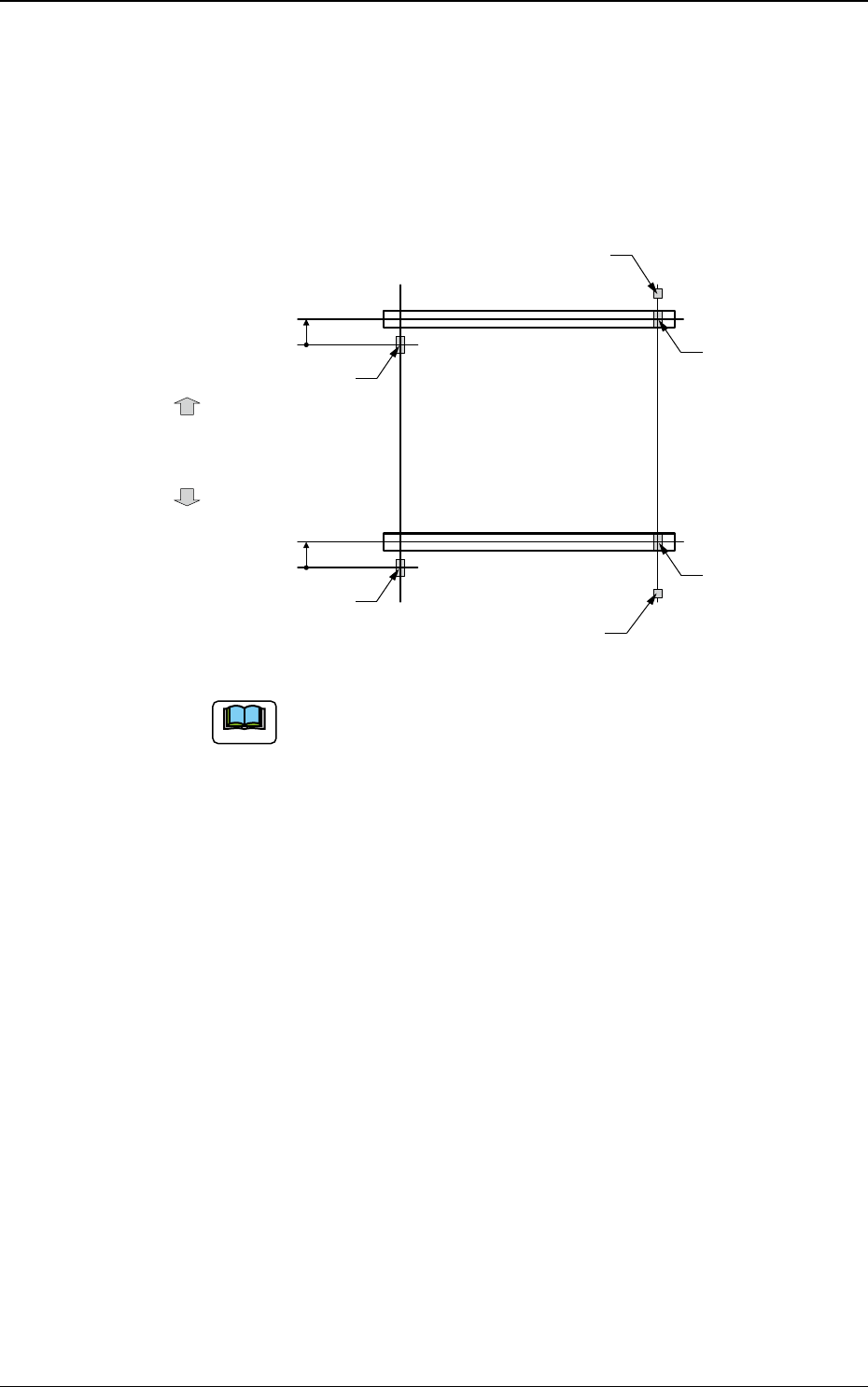
[4] XY-Axis Origin 1 und 2
Die Parameter werden verwendet, um die Eigenschaften der Kopfeinheit
(Bean) (Position), die direkt nach der Montage der Maschine eingerichtet
wurden, konstant zu halten.
Verwenden Sie die rückgemeldeten Werte, die automatisch von der
Bewegungssteuerung gesendet werden, wenn die Y-Achse in die
Nullposition gefahren wird (Einstellungsmodus).
Endsensor
Nullpunktmarke
(Nullpunktsignalposition)
Master-Seite
Nullpunktmarke
(Nullpunktsignalposition)
Endsensor
Kopfeinheit (Beam)
Nullpunktmarke
(Nullpunktsignalposition)
Y-Achsen-Nullpunktoff
set = (+) Wert
Nullpunkt-
verfahrrichtung
Nullpunktver
fahrrichtung
Y-Achsen-Nullpunktoffset
= (+) Wert
Nullpunktmarke
(Nullpunktsignalposition)
Slave-Seite
Kopfeinheit (Beam)
F3B29
Hinweis
(a) Die angezeigten Parameter können nicht von Hand geändert werden.
(b) Der Nullpunktversatz der Y-Achse gibt an, wo sich die Nullposition
der Masterachse bendet, wenn sie in Nullungsrichtung von der
Nullposition der Slave-Achse aus betrachtet wird.
Ein Pluszeichen wird angehängt, wenn sich die Nullposition in
der gleichen Richtung bendet wie die Nullsetzungsposition. Bei
umgekehrter Richtung wird ein Minuszeichen angehängt.
[5] Y-Axis Parallel Drive Origin
Zeigt den Offset-Wert der Nullposition der automatisch justierten parallelen
Antriebsachse der Y-Achse (Masterachse und Slaveachse) an.
[6] [Return]-Taste
Wird diese Taste gedrückt, kehrt das System zum Bildschirm "Offset Data"
zurück.
[7] [Save]-Taste
Wird diese Taste gedrückt, werden die eingegebenen Daten gespeichert.
[Cancel]-Taste
Wird diese Taste gedrückt, kehrt das System zum Bildschirm "Save Data"
zurück und die Eingaben werden verworfen.