DEUKYX-193-3100_G5S2_VOL3.pdf - 第230页
DEUKYX 2-62 193-3100 2.9 Comp. Recog 2.9.1 Comp. Recogn Cam Wird der [Comp. Recog Cam]-Tab im Bildschirm "Comp. Recog" gedrückt, öffnet sich der folgende Bildschirm. Grafischer Ablauf [2] [4] [3] [1] F3B62 [1] …
DEUKYX
2-61193-3100
2.9 Comp. Recog
2.9 Comp. Recog
Wird der [Comp. Recog]-Tab im Bildschirm "Offset Data" gedrückt, öffnet sich
der folgende Bildschirm.
Grafischer
Ablauf
[2]
[4]
[3]
[1]
F3B61
[1] Offset-Auswahltab
Wird diese Taste gedrückt, werden die Offsetdaten der gewählten
Registerkarte angezeigt.
[2] Offsetdaten-Anzeigebereich
In diesem Bildschirm werden die in Schritt (1) gewählten Offsetdaten
angezeigt.
[3] [Return]-Taste
Wird diese Taste gedrückt, kehrt das System zum Bildschirm "Offset Data"
zurück.
[4] [Save]-Taste
Wird diese Taste gedrückt, werden die eingegebenen Daten gespeichert.
[Cancel]-Taste
Wird diese Taste gedrückt, kehrt das System gespeicherten Daten zurück und
die Eingaben werden verworfen.
DEUKYX
2-62193-3100
2.9 Comp. Recog
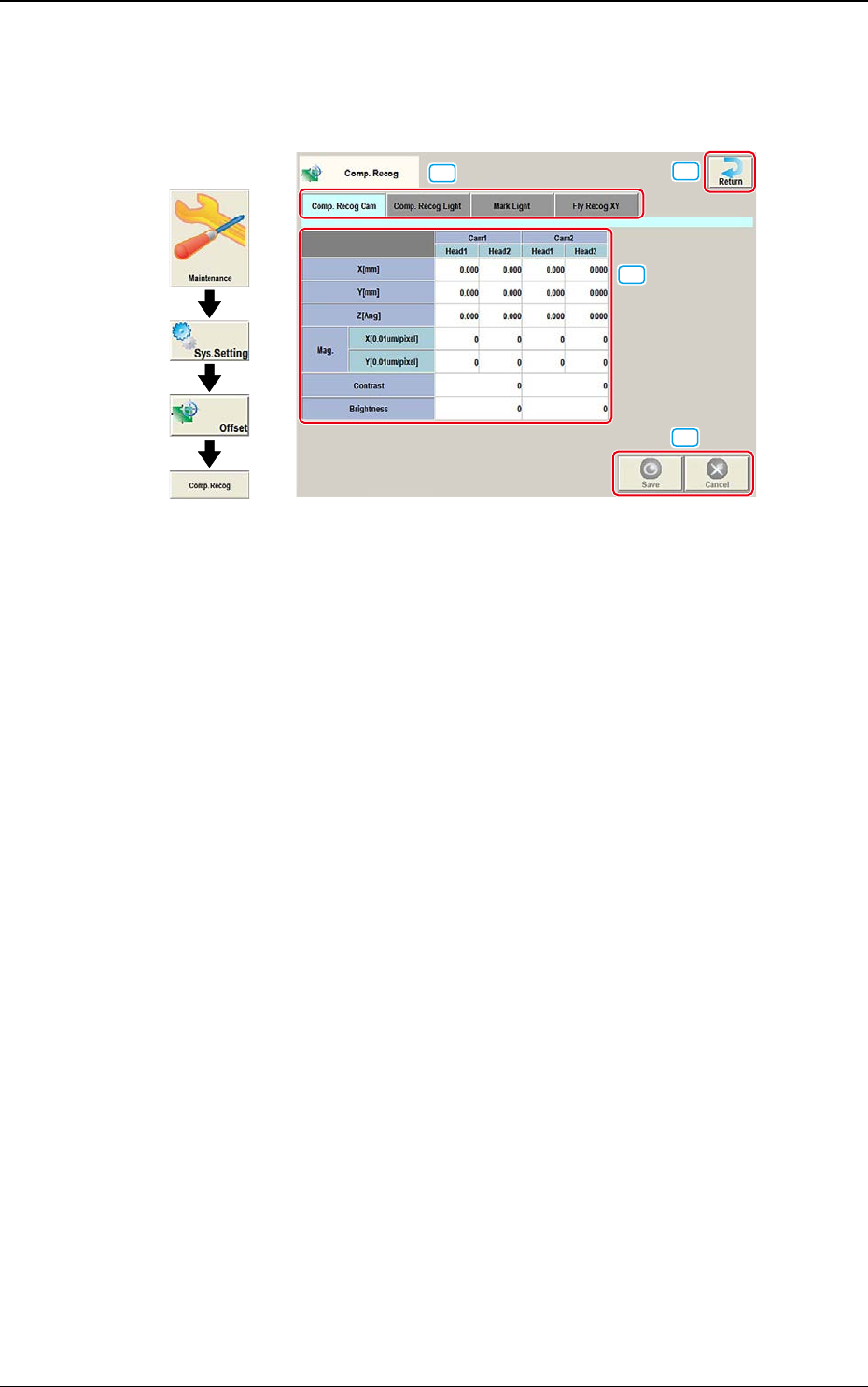
2.9.1 Comp. Recogn Cam
Wird der [Comp. Recog Cam]-Tab im Bildschirm "Comp. Recog" gedrückt,
öffnet sich der folgende Bildschirm.
Grafischer
Ablauf
[2]
[4]
[3]
[1]
F3B62
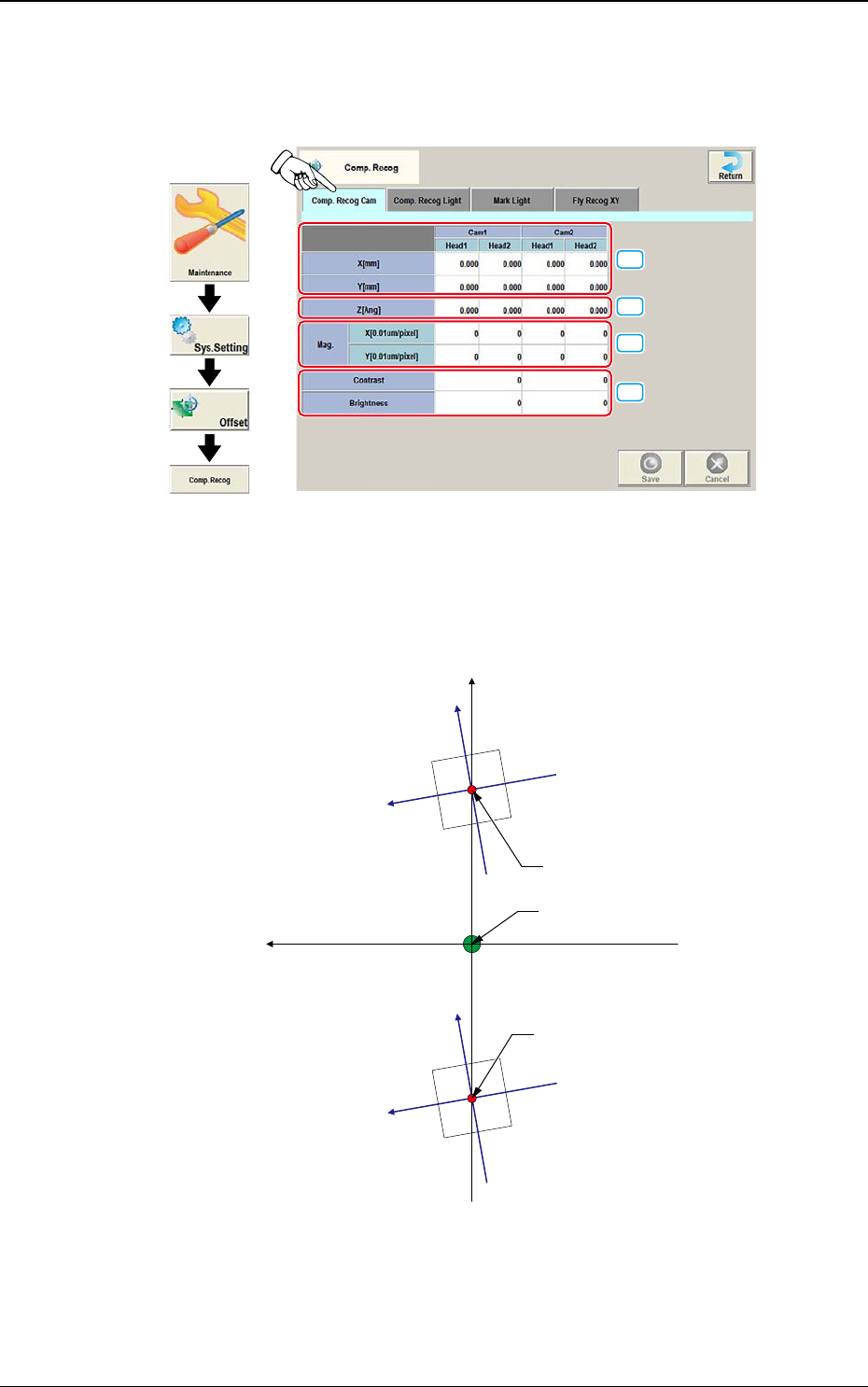
[1] X (Horizontal) und Y (Vertikal) [mm]
Korrigiert designbedingte Positionsabweichungen zwischen
Maschinennullpunkt und dem Mittelpunkt der Bauteilerkennungskameras.
Xm(+)
Ym (+)
Xc(+)
Yc(+)
Xc(+)
Yc(+)
Xm-Ym
Xc-Yc
: Maschinenreferenz
Koordinatensystem
Bauteilmitte
Erkennungskamera
Pm. Maschinenreferenz
Koordinatenursprung
Bauteilmitte
Erkennungskamera
: Bauteilerkennung
Kamerakoordinatensystem
F3B63
DEUKYX
2-63193-3100
2.9 Comp. Recog
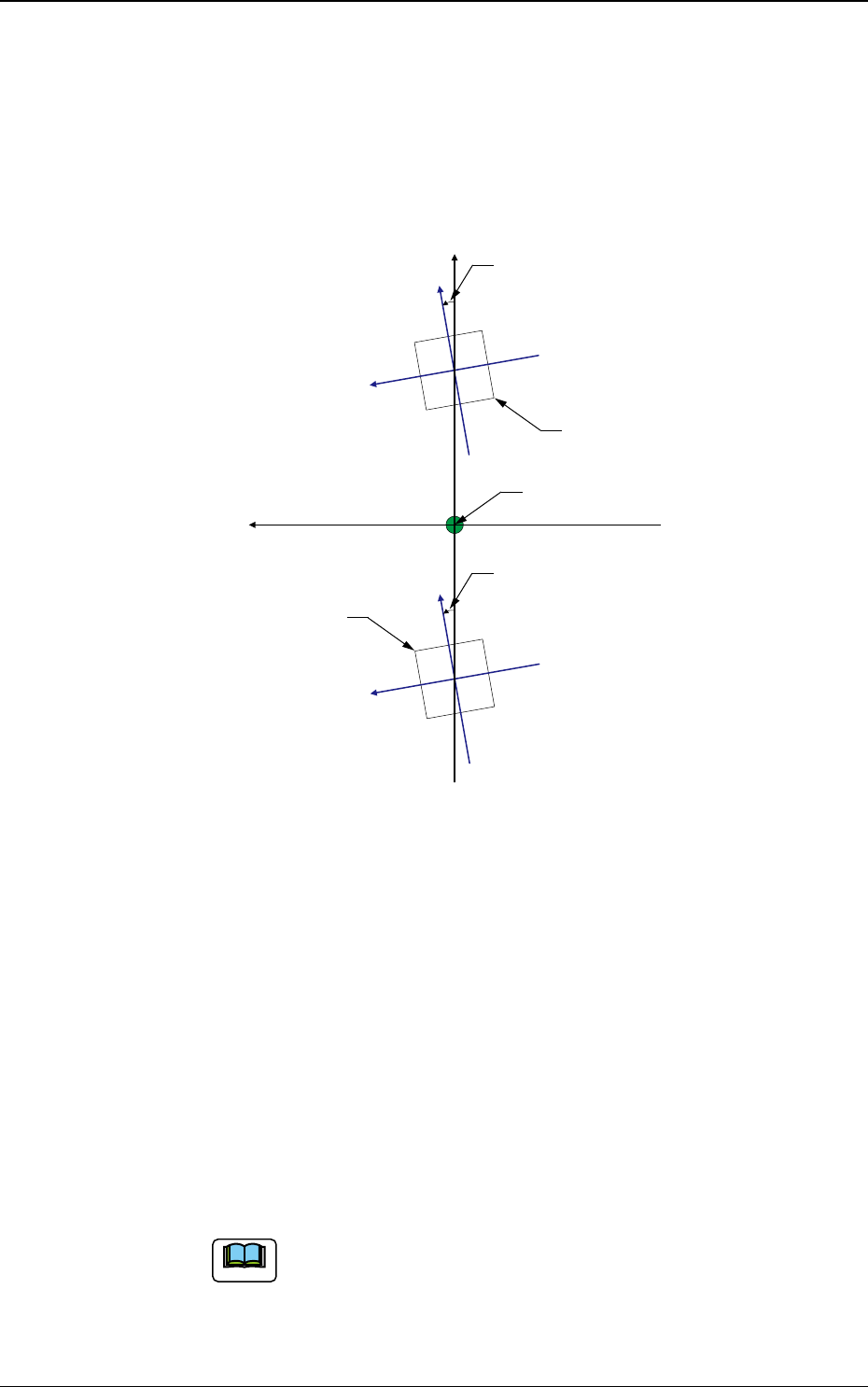
[2] Z (Winkel) [Ang]
Stellen Sie die Parameter ein, die die Winkelabweichungen in den Scan-
Koordinaten der Bauteilerkennungskameras basierend auf den X /
Y-Koordinaten der Maschinenreferenz (Xm-Ym) darstellen.
Wenn die Kamera-Scan-Koordinaten gegen das Uhrzeigersinn zum X /
Y-Koordinatensystem der Maschinenreferenz verschoben werden, müssen
die Offsetwerte mit einem Pluszeichen versehen werden.
Xm(+)
Ym(+)
Xc(+)
Yc(+)
Xc(+)
Yc(+)
Winkel der Bauteilerkennung
Kamera
Xm-Ym : Maschinenreferenz
Koordinatensystem
Xc-Yc : Bauteilerkennung
Kamerakoordinatensystem
Bauteilerkennung
Kamera
Pm. Maschinenreferenz
Koordinatenursprung
Winkel der Bauteilerkennung
Kamera
Bauteilerkennung
Kamera
F3B64
[3] Mag. X (Horizontal) und Y (Vertical) [0.01 µm/pixel]
Legen Sie fest, wie viele Mikrometer einem Pixel entsprechen sollen, um die
Vergrößerung der Bauteilerkennungskamera festzulegen.
Dieser Offsetwert wird automatisch durch Teaching mit der
Vergrößerungsmesslehre berechnet.
• Standard : 6060
[4] Contrast and Brightness
Die Helligkeit des von der Bauteilerkennungskamera aufgenommenen Bildes
kann justiert werden.
• Standard
Contrast : 102
Brightness : 128
Hinweis
(a) Je größer der Wert für „Contrast“ ist, desto stärker werden die Farben.
(b) Je größer der Wert für „Brightness“ ist, desto heller wird das gesamte
Bild.