1OM-1842-003_G5S_Vol1.pdf - 第94页
1OM-1842 1-40 4.3 Riconoscimento PEC La telecamera di riconoscimento PEC è utilizzata per rilevare i punti di riferimento su una PCB e per calcolare le coordinate di deviazione della posizione dal punto di riferimento pe…
1OM-1842
1-391303-001
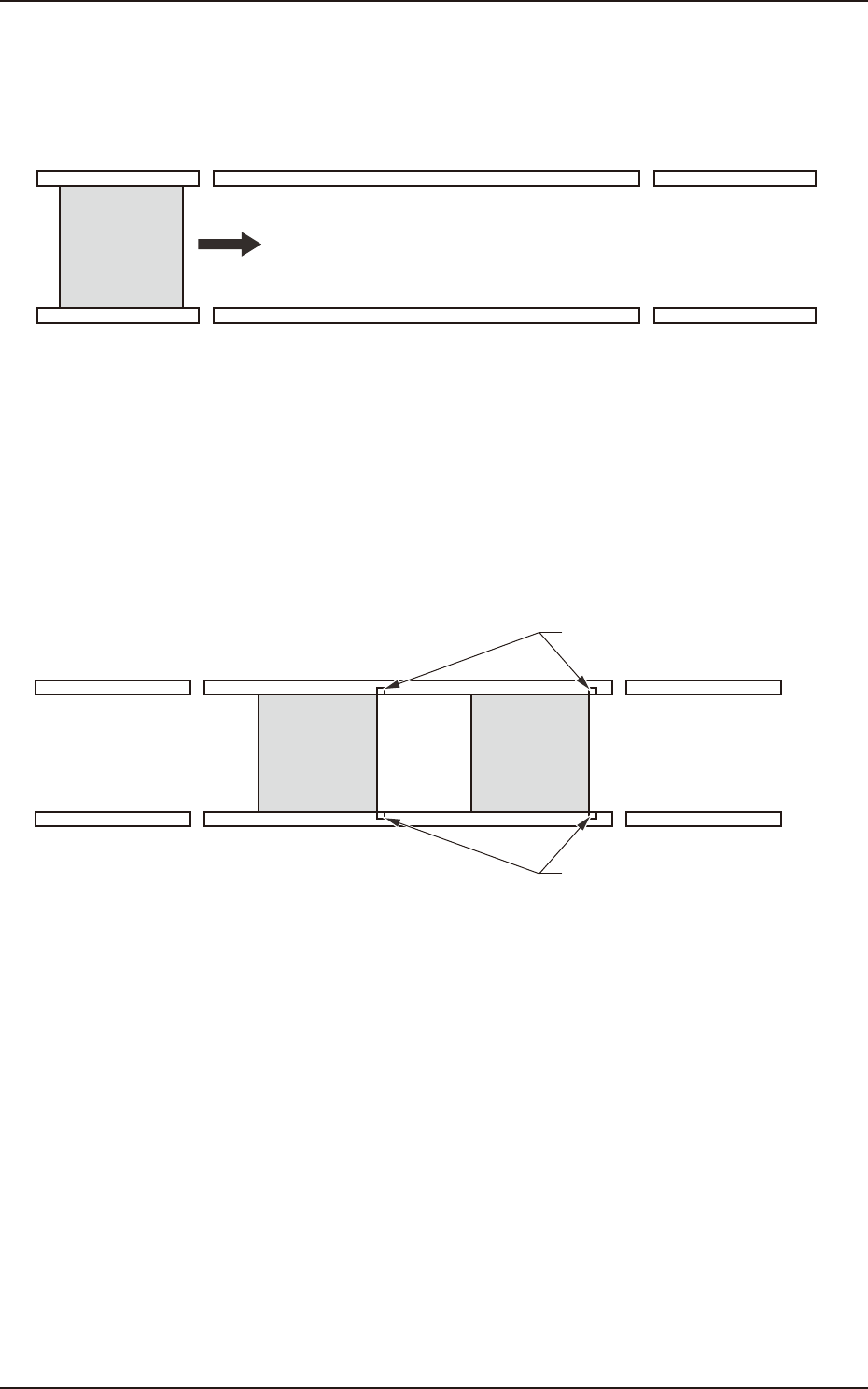
4.1 Ingresso PCB
La è PCB inviata dalla macchina di ingresso è trasferita e raggiunge la sezione di
posizionamento PCB.
PCB
Sezione "L"
(sinistra)
posizionamento PCB
Sezione "R"
(destra)
posizionamento PCB
Selezione ingresso
PCB
Sezione uscita PCB
F1A32-1
4.2 Posizionamento PCB
La PCB è rilevata dal sensore di rilevamento PCB nella sezione posizionamento
PCB e lì viene posizionata.
PCB PCB
Sezione "L"
(sinistra)
posizionamento PCB
Sezione "R"
(destra)
posizionamento PCB
Selezione ingresso
PCB
Sezione uscita PCB
Sensore a fibra di rilevamento PCB
Specchio di rilevamento PCB
F1A32-2
4.1 Ingresso PCB
1OM-1842
1-40
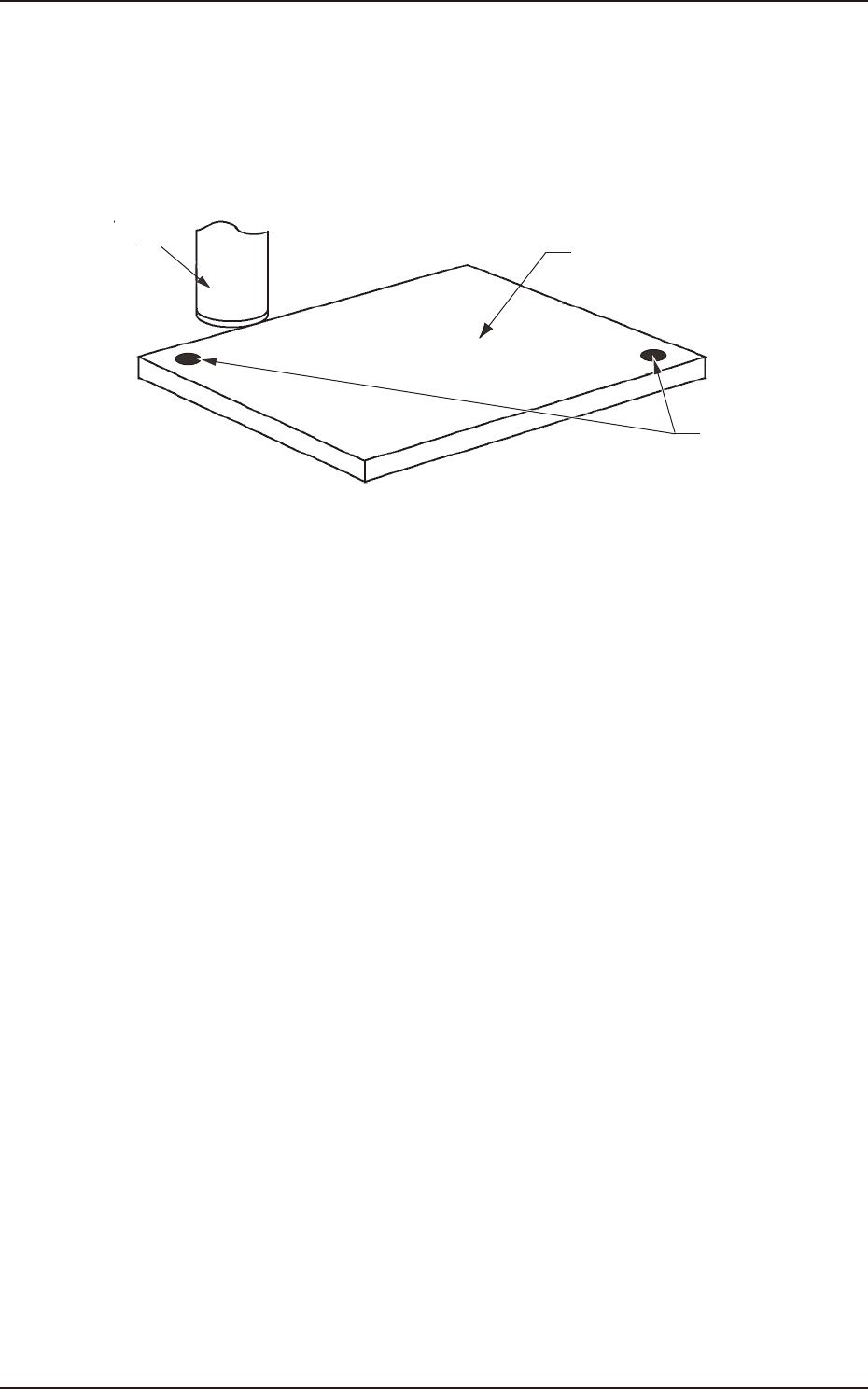
4.3 Riconoscimento PEC
La telecamera di riconoscimento PEC è utilizzata per rilevare i punti di
riferimento su una PCB e per calcolare le coordinate di deviazione della posizione
dal punto di riferimento per correggere la posizione dei componenti da collocare.
Telecamera di
riconoscimento PEC
Punti di riferimento
PCB
Riconoscimento PEC
F1A33
4.4 Fornitura componenti
Il caricatore a nastro sulla base caricatori è spostato alla posizione in cui devono
essere forniti i componenti.
Anche la testina di posizionamento è spostata nelle direzioni X e Y sull’asse X/Y
e preleva un componente. Dopodiché, colloca il componente prelevato sulla PCB.
4.5 Prelievo componente
Gli ugelli di aspirazione sulla testina di posizionamento sono utilizzati per
prelevare i componenti.
1303-001
4.3 Riconoscimento PEC
1OM-1842
1-411303-001
4.6 Riconoscimento componenti
Ciascuna testina è inoltre dotata di una telecamera per visione laterale. La
telecamera per visione laterale è utilizzata per rilevare i componenti da prelevare
ed i componenti verticali. È utilizzata anche per misurare lo spessore dei
componenti.
La telecamera di riconoscimento componenti acquisisce l'immagine del
componente prelevato dall’ugello di aspirazione per l'ispezione.
I sistemi di riconoscimento anteriore e posteriore sono utilizzati per riconoscere
componenti con la telecamera il riconoscimento componenti. Uno dei due sistemi
è selezionato automaticamente, in base alla modalità luminosa specicata nella
libreria dati dei componenti.
Procedura di riconoscimento componenti
Il sistema di riconoscimento componenti esegue le seguenti tre operazioni.
•
Rilevamento componenti.
Tutti i componenti sono considerati oggetto per il rilevamento.
•
Ispezione componente.
Sono eseguite varie ispezioni in base ai dati della libreria componenti.
•
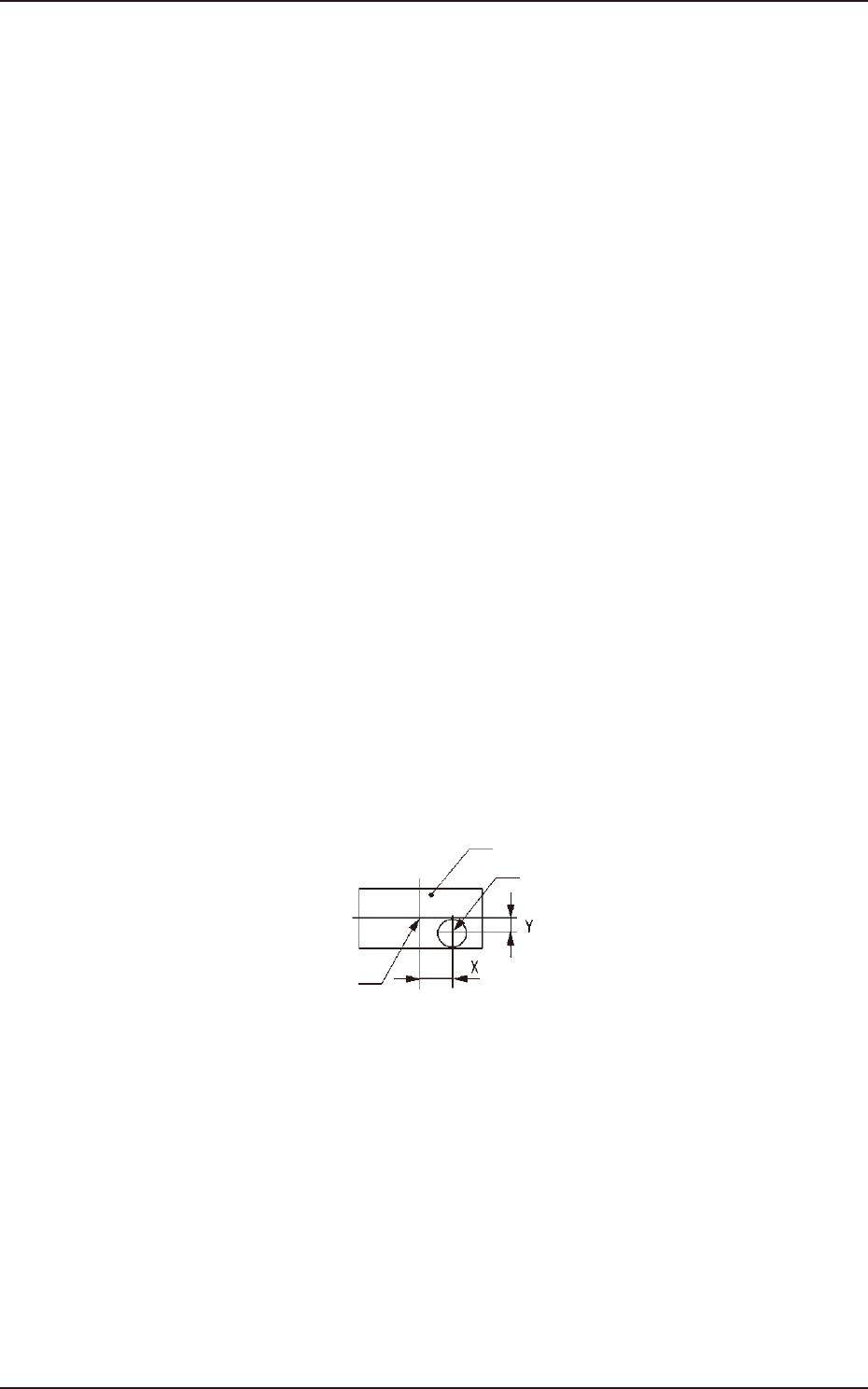
Misurazione della deviazione di posizione e angolare del componente.
È misurata la deviazione di posizione (X, Y) e la deviazione angolare (
q
)
tra il centro della telecamera di riconoscimento componenti ed il centro del
componente.
Componente
Centro del componente
Ugello di aspirazione
Stato del componente prelevato dall’ugello di aspirazione F1A34
4.6 Riconoscimento componenti