1OM-1842-003_G5S_Vol1.pdf - 第97页
1OM-1842 1-43 1303-001 4.7 Posizionamento componente La testina si sposta sul punto (coordinate) di posizionamento PCB specicato dal programma pattern per la PCB in modalità di standby . A questo punto, le deviazioni di…
1OM-1842
1-421303-001
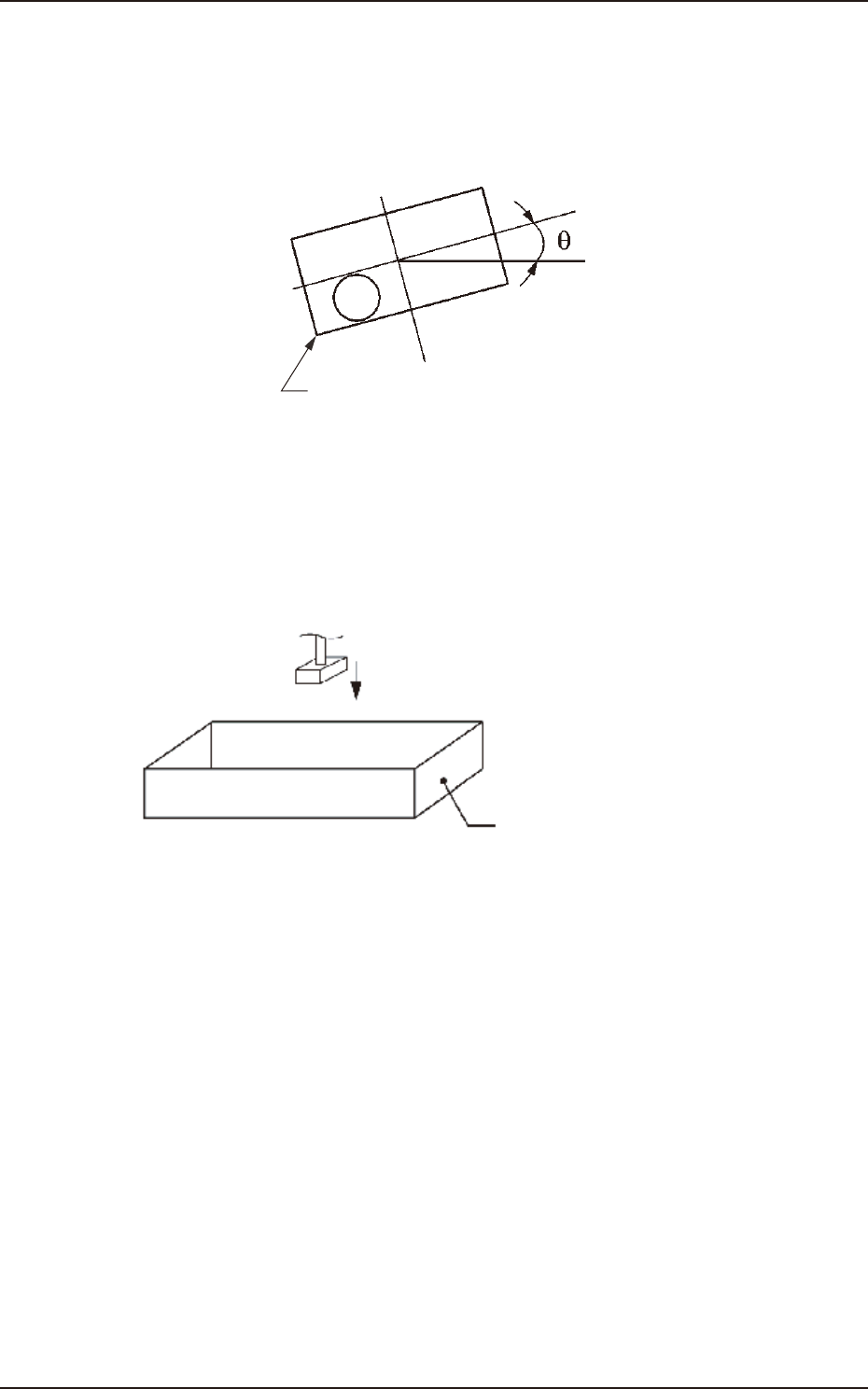
Correzione riconoscimento (correzione angolare)
Il componente prelevato è regolato sull'angolazione (direzione) di posizionamento
specicata nel programma pattern ruotando la testina. A questo punto, è corretta
anche la deviazione angolare (θ) rilevata tramite dal riconoscimento componenti.
Componente
F1A35
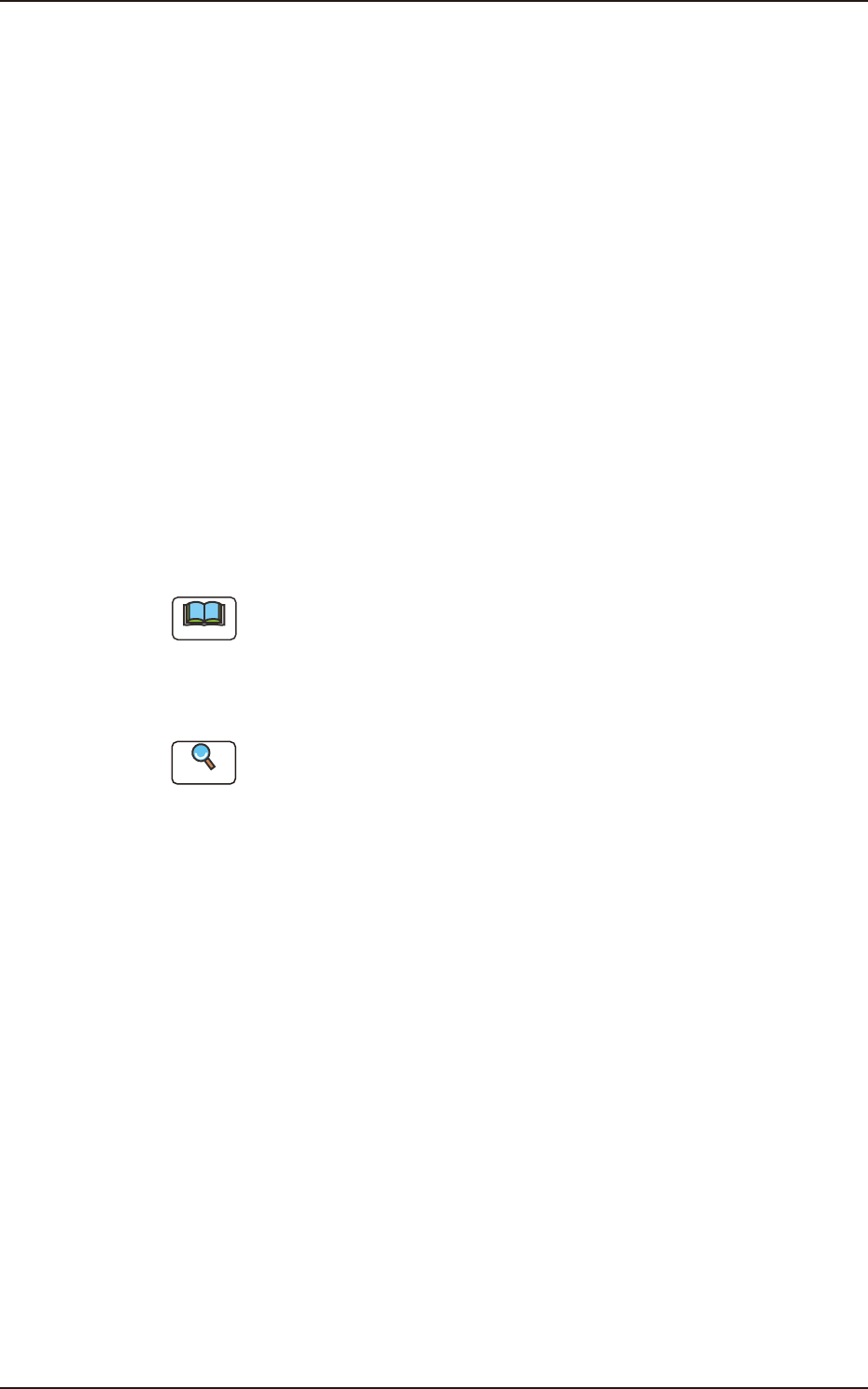
Scarico componenti (scatola di deposito componenti)
Quando si verica un errore durante il riconoscimento componenti, la testina si
sposta sulla scatola di deposito componenti e scarica il componente che ha causato
l’errore.
Alloggio componenti
Scarico componenti F1A36
4.6 Riconoscimento componenti
1OM-1842
1-431303-001
4.7 Posizionamento componente
La testina si sposta sul punto (coordinate) di posizionamento PCB specicato
dal programma pattern per la PCB in modalità di standby. A questo punto, le
deviazioni di posizione (X, Y) misurate dal riconoscimento componenti sono
corrette per il prelievo dei componenti appropriati.
Il limite inferiore degli ugelli di aspirazione è controllato in base ai dati della
libreria componenti.
L'elettrovalvola si chiude e il componente prelevato dagli ugelli di aspirazione è
posizionato sulla PCB.
L’asse anteriore e posteriore eseguono ripetutamente a turno le azioni di
posizionamento e di prelievo componenti, realizzando il montaggio di componenti
in modo efcace e continuo.
4.8 Uscita PCB
La PCB sulla quale sono già stati collocati i componenti è inviata alla macchina di
uscita tramite il buffer.
Note
Quando è utilizzato il metodo di uscita non standard, e nella macchina di uscita
la velocità di trasferimento PCB è inferiore, impostare la stessa velocità di
trasferimento sulla macchina.
Impostare "Output Machine Set Transfer Speed (Default Value: 300 [mm/sec])"
sullo stesso valore della macchina di uscita utilizzando "PCB Transfer Mode".
Reference
Fare riferimento al paragrafo "3.2 Modalità di trasferimento PCB" del "Capitolo
2 (Volume 3)" per i dettagli.
4.7 Posizionamento componente
1OM-1842
1-441303-001
5. Varie funzioni
5.1 Funzione di riconoscimento PEC
In casi normali, sulla PCB sono messi due punti di riferimento e le coordinate e
le deviazioni di posizione sono rilevate dalla telecamera di riconoscimento PEC.
Questa funzione corregge automaticamente le posizioni di posizionamento dei
componenti in base alle deviazioni di posizione riconosciute.
Ci sono tre tipi di funzione di riconoscimento PEC - "Global", "Image" e "Local".
La funzione di riconoscimento globale copre tutti gli errori di posizione su una
PCB ed è utilizzata per correggerli. La funzione di riconoscimento delle immagini
è utilizzata per correggere gli errori di posizione per ciascun pattern. La funzione
di riconoscimento locale è utilizzata per correggere le deviazioni di posizione per
ciascun punto di posizionamento dei componenti.
Note
(a) Quando le PCB sono posizionate sulla sezione posizionamento
PCB, e la precisione meccanica di posizionamento PCB varia a
causa di variazioni nelle dimensioni esterne delle PCB, la funzione
di riconoscimento PEC può aiutare in modo efcace per ridurre
l'imprecisione.
(b) I punti di riferimento sono messi per rilevare la posizione dei modelli di
posizionamento. Quindi, la relazione posizionale tra i punti di riferimento
ed i modelli di posizionamento deve essere costante. Diversamente, la
precisione di posizionamento non può essere migliorata.
5.2 Funzioni relative al prelievo e posizionamento dei
componenti
5.2.1 Funzione di regolazione asse del caricatore automatico
Quando un componente è prelevato dagli ugelli di aspirazione ed è spostato
rispetto la corretta posizione di prelievo, questa funzione utilizza il sistema di
riconoscimento per correggere le deviazioni e permettere il posizionamento
preciso dei componenti.
Ritrasmettendo la quantità rilevata di correzione alla posizione di prelievo, la
posizione di prelievo può anche essere portata vicina a quella specicata.
5.2.2 Funzione di apprendimento automatico della posizione di prelievo
Quando un caricatore a nastro è rimosso o inserito, la posizione del caricatore è
rilevata automaticamente, e la posizione riconosciuta è ritrasmessa alla posizione
di prelievo, permettendo di portare la posizione di prelievo il più vicino possibile
a quella accurata (specicata).
5. Varie funzioni