JM-50_机器控制参数 - 第112页
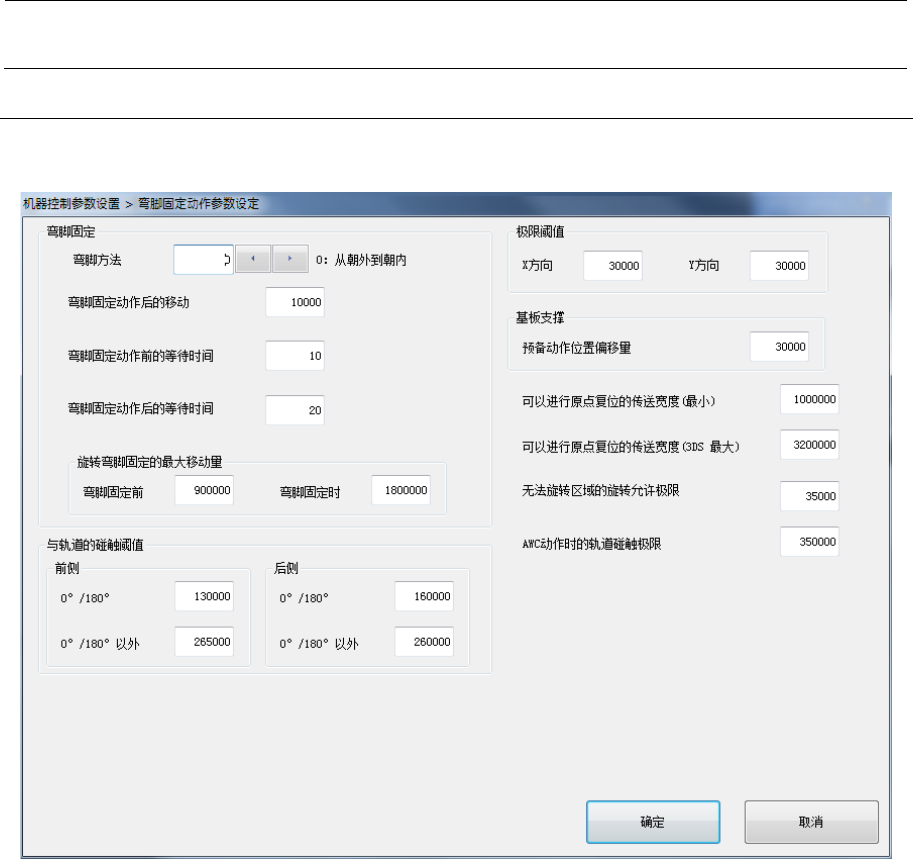
机器控制参数 2- 105 2-4- 11 弯脚固定动作参数 可以设置 弯脚固定动 作,以及轨道与极限 阈值 、基板 支撑的参数 。
机器控制参数
2-104
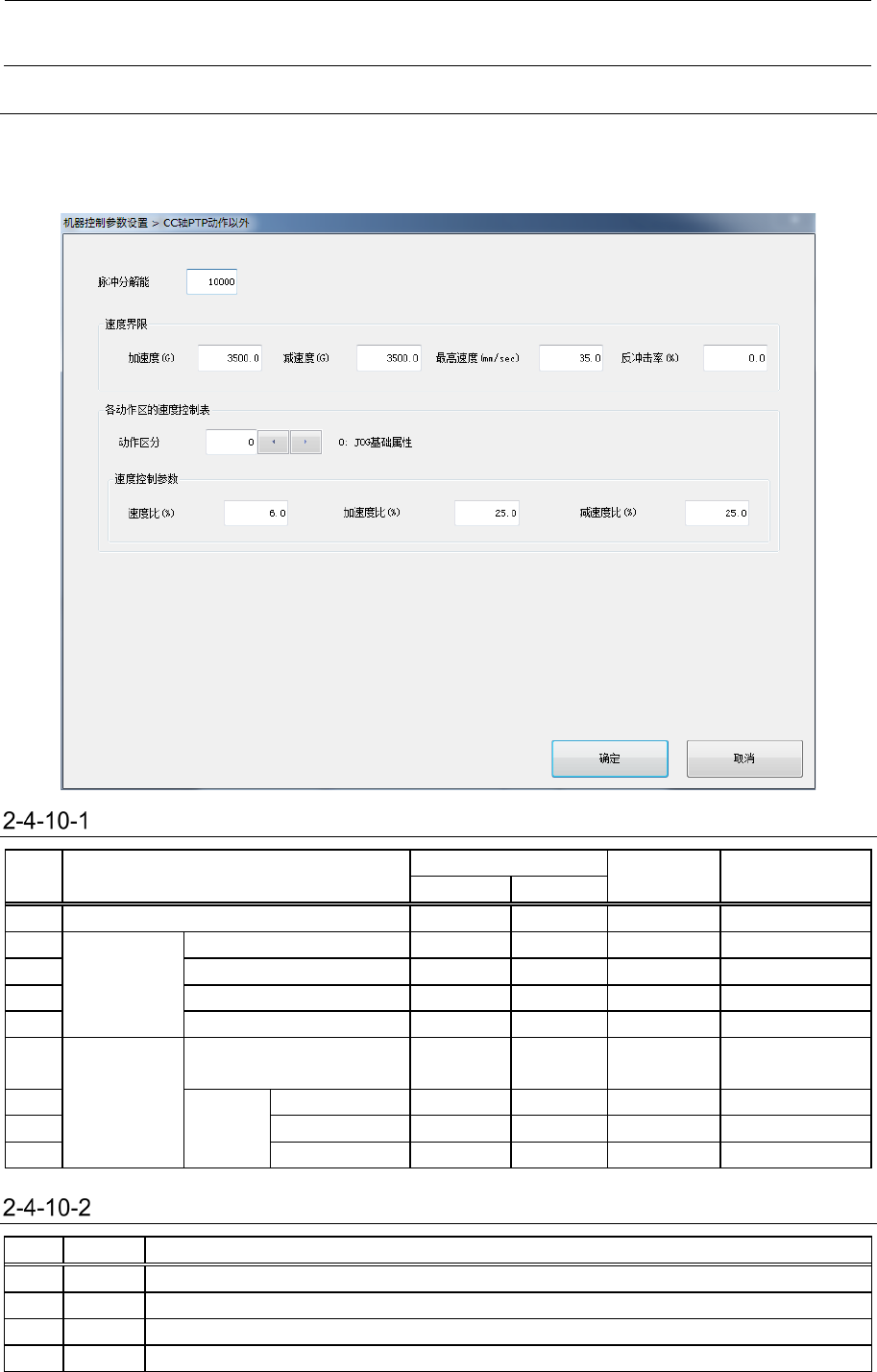
2-4-10 CC轴PTP动作以外
可以编辑脉冲分解能及速度界限的参数。
将「动作区分」设置在要进行编辑的索引中时,可以按照设定的区分编辑速度控制参数。
设置项目
No. 项目
输入范围
单位 备考
最小值
最大值
1
脉冲分解能
nm/Pulse
2
速度界限
加速度
-1000000
1000000
G
3
减速度
-1000000
1000000
G
4
最高速度
-1000000
1000000
mm/sec
5
反冲击率
-100000
100000
%
6
各动作区的
速度控制表
动作区分
0
9
参照2-4-10-2动
作区分
7
速度控
制参数
速度比(
%
)
-100000
100000
%
8
加速度比(
%)
-100000
100000
%
9
减速度比(
%)
-100000
100000
%
动作区分
No.
类别
内容
1
0
JOG
基础属性
2
1
单步
3
2
返回原点
4
3
~
9
预备
机器控制参数
2-105
2-4-11 弯脚固定动作参数
可以设置弯脚固定动作,以及轨道与极限阈值、基板支撑的参数。
机器控制参数
2-106
设置项目
No.
项目
输入范围
单位 备考
最小值
最大值
1 弯脚固定 弯脚方法 0 5 参照
2-4-11-2
弯脚方法
2
弯脚固定动作后的移动
-120000
120000
0.1μm
3
弯脚固定动作前的等待时间
0
10000
ms
4
弯脚固定动作后的等待时间
0
10000
ms
5
旋转弯脚固定的
最大移动量
弯脚固定前
900000
1800000
0.0001deg
6
弯脚固定时
900000
1800000
0.0001deg
7
与轨道的
碰触阈值
前侧
0
°
/180
°
0
9999999
0.1μm
8
0
°
/180
°以外
0
9999999
0.1μm
9
后侧
0
°
/180
°
0
9999999
0.1μm
10
0
°
/180
°以外
0
9999999
0.1μm
11
极限阈值 X方向
0
9999999
0.1μm
12
Y
方向
0
9999999
0.1μm
13
基板支撑
预备动作位置偏移量
0
180000
0.1μm
14
可以进行原点复位的传送宽度(最小)
500000
9999999
0.1μm
15
可以进行原点复位的传送宽度(3DS最大)
500000
9999999
0.1μm
16
无法旋转区域的旋转允许极限
0
9999999
0.1μm
17
AWC
动作时的轨道碰触极限
0
9999999
0.1μm
弯脚方法
No.
类别
内容
1
0
从朝外到朝内
2
1
从朝内到朝外
3
2
左旋转
4
3
右旋转
5
4
N
弯曲
(
左
)
6
5
N
弯曲
(
右
)