JM-50_机器控制参数 - 第77页
机器控制参数 2- 70 2-2-9 示教步骤控制 [ 低速(脉冲) ] 、 [ 高速(脉冲) ] 、 [ 低速→高速转换时间 ] 的“接近界限时”仅在选择 XY 移动时 使用。
机器控制参数
2-69
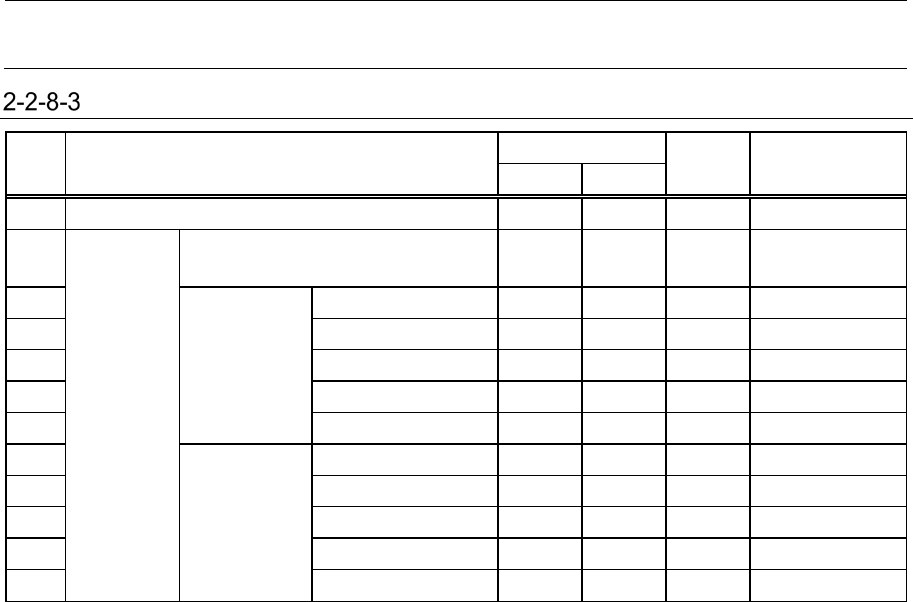
设置项目
No.
项目
输入范围
单位 备考
最小值
最大值
1
轴
0
2
参照
2-2-8-1
轴
2
增益表 增益区分
0
3
参照2-2-8-2增
益表
3
改变与否 负荷惯性力矩比
0
255
4
模型控制增益
0
255
5
位置控制增益
0
255
6
速度控制增益
0
255
7
速度积分补偿
0
255
8
改变价值 负荷惯性力矩比
0
65535
9
模型控制增益
0
65535
10
位置控制增益
0
65535
11
速度控制增益
0
65535
12
速度积分补偿
0
65535
机器控制参数
2-70
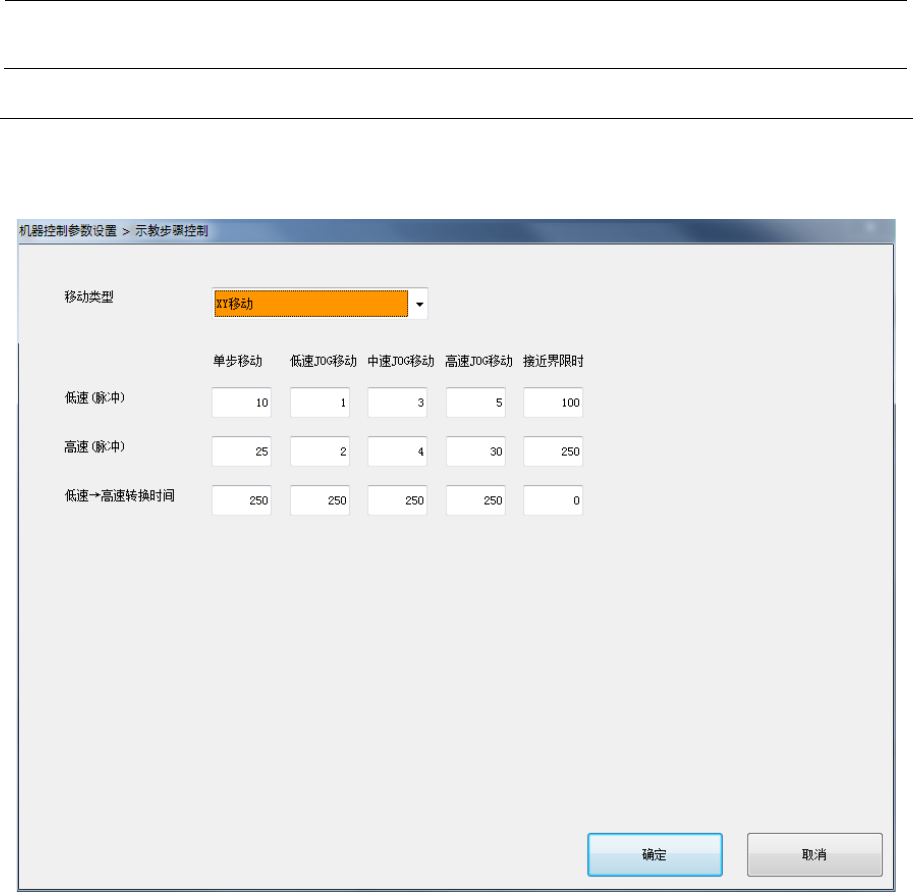
2-2-9 示教步骤控制
[低速(脉冲)]、[高速(脉冲)]、[低速→高速转换时间]的“接近界限时”仅在选择XY移动时
使用。
机器控制参数
2-71
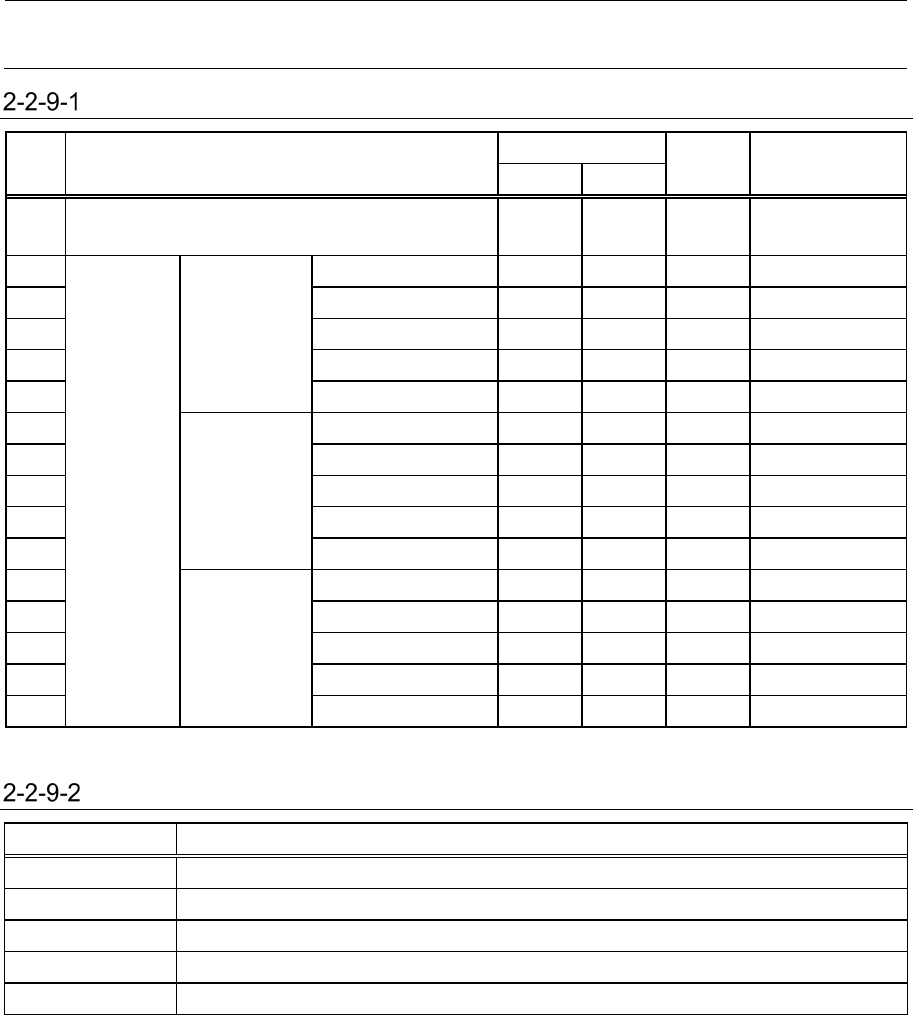
设置项目
No.
项目
输入范围
单位 备考
最小值
最大值
1
移动类型
0
4
参照2-2-8-2移
动类型
2 示教用
步骤控制
低速 单步移动
Pulse
3
低速JOG移动
Pulse
4
中速
JOG
移动
Pulse
5
高速
JOG
移动
Pulse
6
接近界限时
Pulse
7
高速 单步移动
Pulse
8
低速
JOG
移动
Pulse
9
中速
JOG
移动
Pulse
10
高速JOG移动
Pulse
11
接近界限时
Pulse
12
低速→ 高速
转换时间
单步移动
Pulse
13
低速JOG移动
Pulse
14
中速JOG移动
Pulse
15
高速
JOG
移动
Pulse
16
接近界限时
Pulse
移动类型
No.
内容
1 XY移动
2 Z移动
3
θ
移动
4
支撑台移动
5
AWC移动